前言:对于2D布局图一般很少导入仿真软件中使用,基本上都是直接导入3D模型进行仿真,当然,如果我们手上没有3D布局的时候,可以将2D布局图导入做参考(在规划或者项目执行初期,改造项目客户只提供了2D布局图等等情况下)。1、首先我们需要将2D布局图用AutoCAD打开,将布局图位置移动到世界坐标原点位置,然后另存为dxf格式的文件。启动仿真软件MotoSimEG-VRC,新建导入2D布局图的项目,然后将dxf格式的2D布局图复制到项目文件夹下models目录下,返回仿真软件,打开模型树,先保存一下再进行下一步;
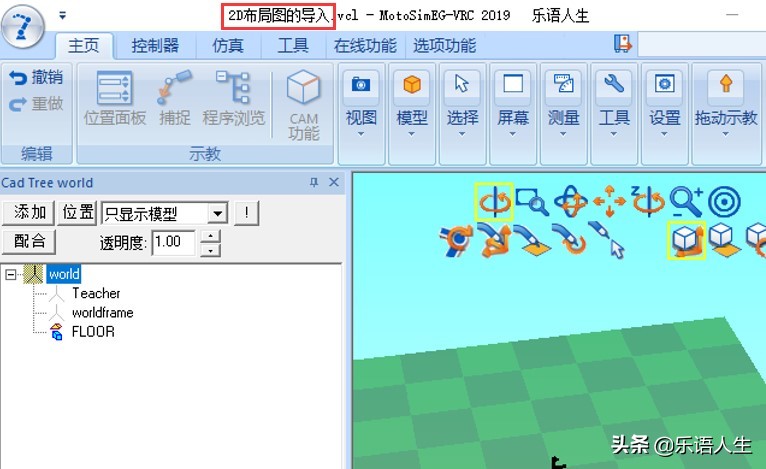
2、在模型树上选中world,然后点击添加按钮,弹出模型添加对话框,点击文件名称下面的省略号(图中1),选取dxf格式的2D布局图文件,Open、确定;

3、弹出CAD输入对话框后,我们将高速模式打勾,确定;

4、等待布局图导入完成,调整FLOOR大小使整个布局图都展示在FLOOR上面,可以看到2D布局图只显示图形,如下图所示;

5、接下来我们将提前转档为hsf格式的3D模型导入系统,操作步骤同上,导入后需打开模型属性对话框,将比例修改为0.01,完成后调整3D模型位置使之和2D布局图重合,下一节将进行三轴变位机双机弧焊系统的操作设置,保存、退出;
