

文|逸屹川
编辑|逸屹川
用机器视觉代替人眼是计算机技术发展的又一成果,也是现代制造业发展的需求,特别是在连续工作的生产线,人力难进行工作的环境下,更显其独特的优势。
多年来,技术人员一直在探索三维成像技术以得到被测物体的三维几何形状,在19种立体成像方法中,双目视觉测量方法是目前应用最广的方法。
由于该类方法硬件实现简单,具有大量程、大视场、特征提取简单、实时性强等特点,目前已广泛应用于工业检测、工件建模、质量控制、逆向设计、医学、虚拟现实、*物文**数字化和人体测量等众多领域。
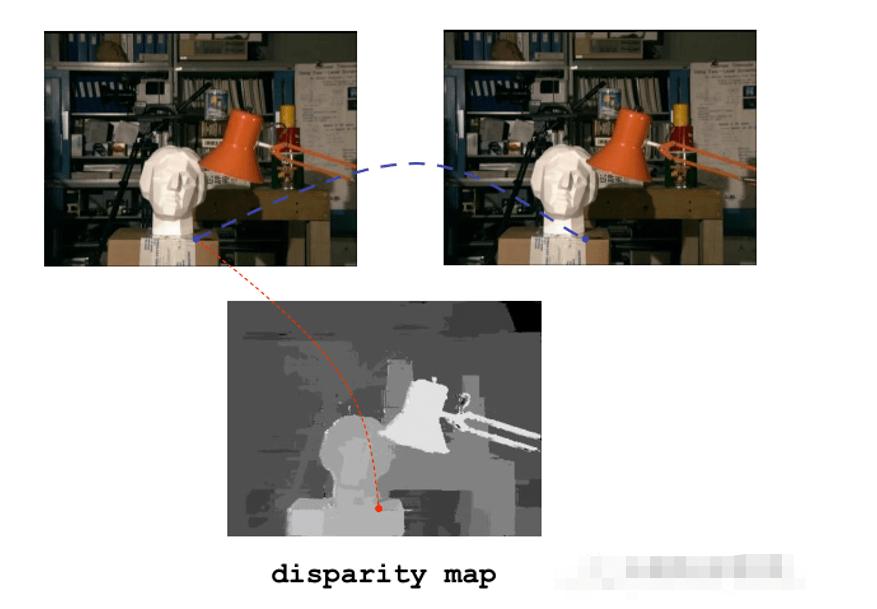
所谓双目视觉测量就是直接模拟人类双眼处理场景的方法,利用两台固定位置的成像设备,从不同视角同时获取同一场景的两幅图像。
对所获取的图像进行去噪、立体矫正、立体匹配,最后结合标定参数计算物体的三维深度信息。
与主动式三维视觉测量(结构光)方法相比,该方法不受投影图案质量的影响,且不需要投影多幅编码图案,在缩短了测量时间的同时也提高了测量精度。
但是,双目视觉测量技术在应用中仍然存在一些问题,比如在获取图像的过程中,过强的环境光会造成相机图像传感器饱和,丢失了图像中高光区域的特征信息,以致难以正常进行测量。
另一方面,由于相机的动态范围有限,对于背光区域,则会造成获取图像过暗,大幅降低测量精度。
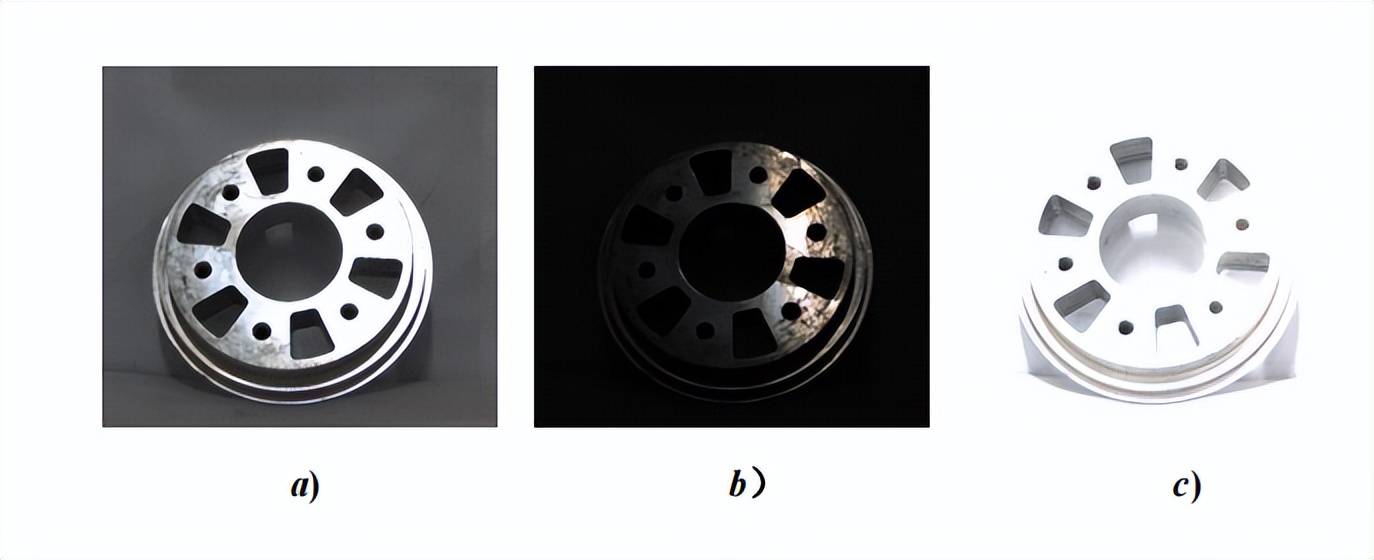
当金属工件处于弱光环境下,正对相机的强反射区域能够提供清晰的轮廓外形,而其它区域则因太暗导致相机无法成像,没有足够的信息来恢复工件的三维形貌。
当处于强光环境下,原来弱反射区域的孔洞区域变得清晰可见,但是强反射区域则变得十分明亮,导致工件轮廓区域发生饱和。
造成上述现象的根本原因是该工件表面亮度的变化范围远远大于相机拍摄图像0-255的灰度值范围。
结构光视觉测量
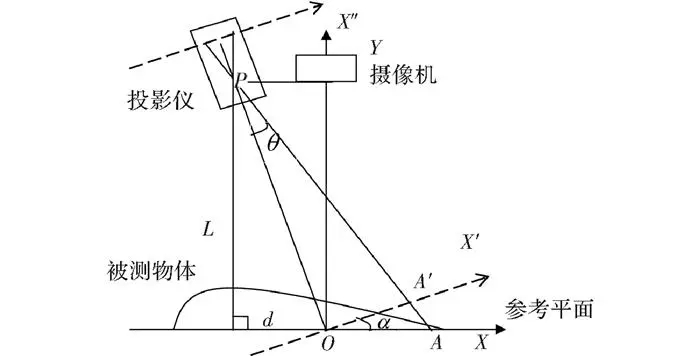
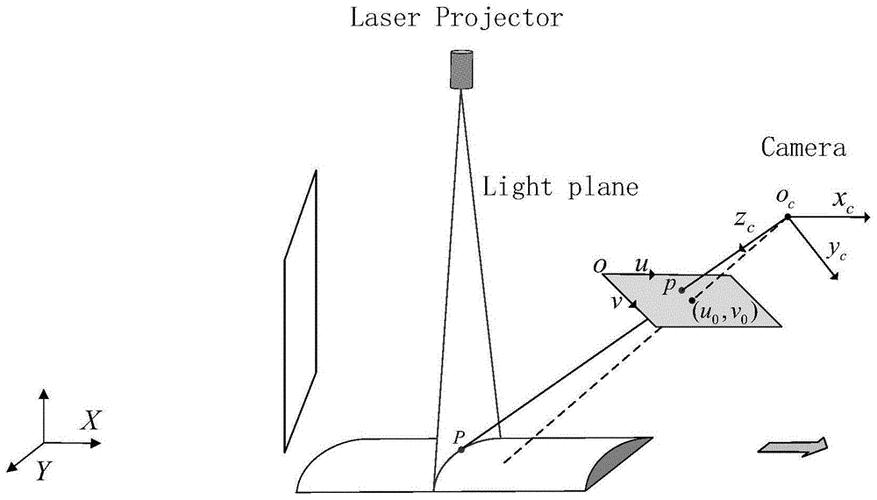
结构光视觉测量是把一个具有一定样式的条纹(Pattern)光按照一定的角度投射到一个物体上,然后根据另一角度的成像设备抓取到因物体表面形状变化而产生的扭曲条纹。
结合标定参数即可测量物体表面的三维信息,按照投影图案的不同可以将结构光测量方法分为线结构光、面结构光。
线结构光通过投射源投射出平面狭缝光,每次投射一条结构光条纹,相应的得到一个截面的深度。
为了得到整个物体表面的三维信息,就需要增加一维扫描机构。
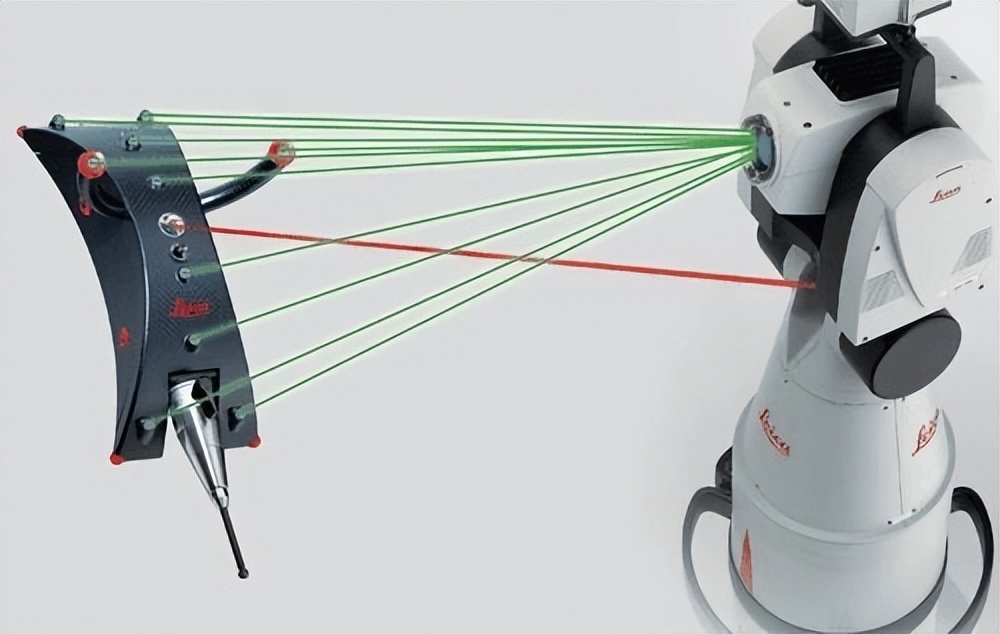
基于线结构光的激光扫描仪是在工业上广为应用的获取三维深度信息的成熟方法,比如美国Cyberwar公司提供的快速三维扫描仪。
但是,激光扫描仪存在的最大问题是它只能对静态物体扫描,而且必须采集大量的图像。
为了获取整个物体的三维信息,扫描仪必须沿着重建面逐行或者逐列扫描,但在扫描过程中,物体与扫描仪的位移必须精确可知。

基于网格的激光扫描仪虽然能解决以上问题,但是也带来了新的问题,即对每个网格的识别变得困难。
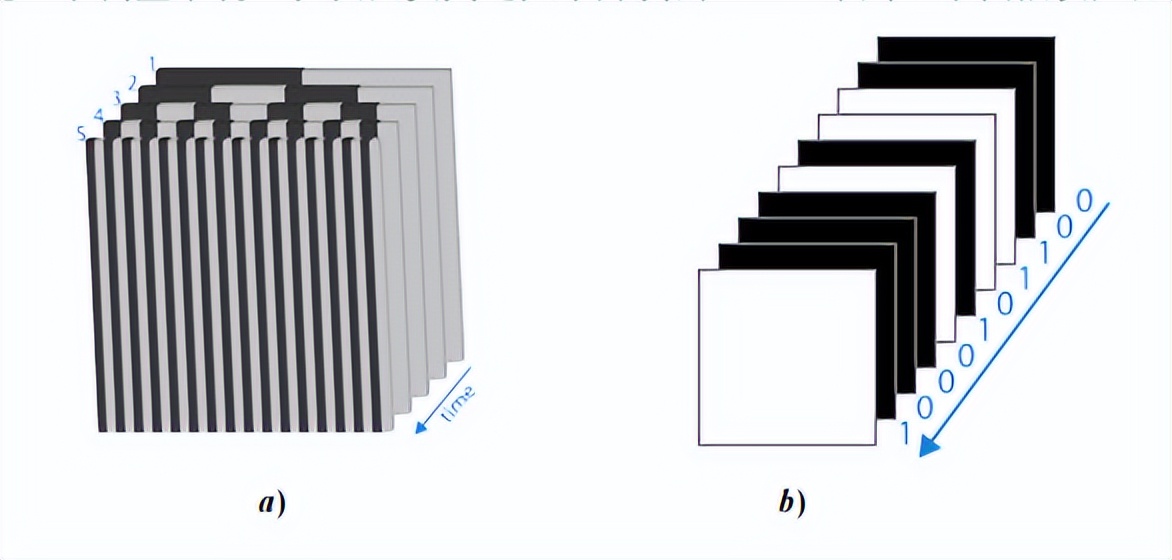
为此,研究人员提出了编码结构光,即利用投影仪按照一定规律产生不同的条纹编码,使得投影图案与相机记录图像对应点的匹配变得简单。
例如Herakleous和Poullis提出的“3DUNDERWORLD-SLS”系统通过投射多幅编码条纹图案(格雷码编码,)来获取静态物体的高精度三维重建表面。
Boyer和Kak提出的彩色编码结构光条纹,并提出了三步相位重建算法。
由于该方法仅需投影一次彩色条纹即可得到物体的深度信息,使得动态三维测量成为可能。
近十多年来,国内清华大学、北京大学、上海交通大学、西安交通大学、天津大学、中国科学院自动化研究所等单位也对结构光测量技术进行了系统研究,并成功推出了商品化的结构光测量系统。
如:清华大学研制的线结构光三维重构与测量系统,主要用于移动物体和腐蚀性表面的快速、在线、非接触的重构与测量。
天津大学研制的线结构光轮廓传感器,华中科技大学研制的PowerScanner系列结构光三维测量系统,以及西安交通大学开发的3DSS系列三维扫描仪产品。
双目视觉测量系统研究
二十世纪八十年代,学者Marr提出了第一个较为完善的视觉理论框架,使得基于视觉理论的三维测量技术越来越受到人们的重视。
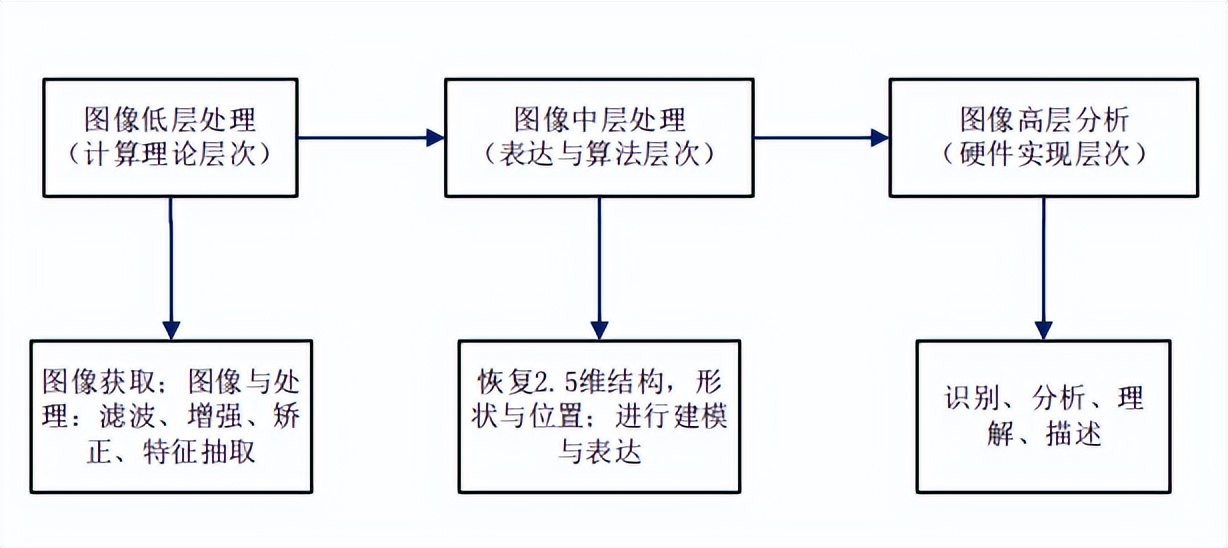
学者Marr从信息处理系统的角度出发,认为视觉系统的研究应分为三个层次,即计算理论层次、表达(representation)与算法层次、硬件实现层次。
它的核心思想是将低层的图像特征信息经过中间层的处理后恢复出高层的三维结构。
90年代早期,由于立体匹配技术的发展,使得三维场景重建以及摄影测量技术逐渐成熟,并应用到虚拟现实、三维场景重建以及摄影距离测量等特定问题中。
国外对双目视觉系统研究的较早,并将双目立体技术成功的应用于各个领域。
麻省理工大学融合立体视觉技术与传感器技术,提出一种创新型智能交通工具,可以为驾驶系统提供目标物体的稳健深度信息。
英国国家机器视觉技术实验组采用立体视差测距原理,开发了一个三维重建的PMF系统,可以完成从2.5维到三维的重建过程,并且将该系统成功的应用于物体识别领域。
奥林巴斯公司(OlympusCorporation)研制开发的内窥镜产品,该产品利用立体视觉原理对工件进行三维测量,实时检测产品的三维尺寸及参数变化,并提供各项损伤数据及精确的评估数据。
日本奈良科技大学提出了一种基于双目视觉的增强现实系统注册方法,通过动态修正特征点的位置提高注册精度。

东京大学根据立体视觉系统获得的目标物体信息与机器人的姿态信息,研发出基于立体视觉的机器人导航系统。
日本大阪大学利用双目视觉为自适应双目视觉伺服系统提供视觉支持,实现对目标物体的运动预测和自适应跟踪。
日本冈山大学发明了一种基于立体视觉技术的显微镜视觉反馈系统,可以完成包括基因注射和微装配等一系列的细胞相关处理。
与国外相相比,国内关于双目立体技术研究的较晚,中国科学院自动化研究所利用立体视觉等相关技术重现了物体完整的三维结构。
浙江大学在不需要物体的运动先验知识的情况下可以获取特征点的位置信息,实现了对多自由度机械装置的位姿检测。天津大学张宏伟等人利用立体视觉技术,对软质复杂表面实现了精确三维测量。
能够对自然地形的轮廓特征进行重建,重建后的结构轮廓清晰,重建精度较高。
哈尔滨工业大学提出一种异构双目活动视觉系统,能够实现足球机器人的全自动导航。
维视图像公司基于CCD双目视觉系统,研发出一个完整的测量系统,可以实现三维测量、虚拟现实、智能机器人导航等功能。
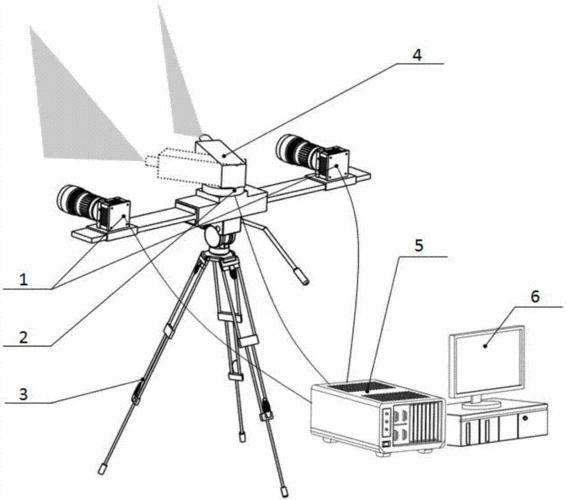
双目视觉测量系统
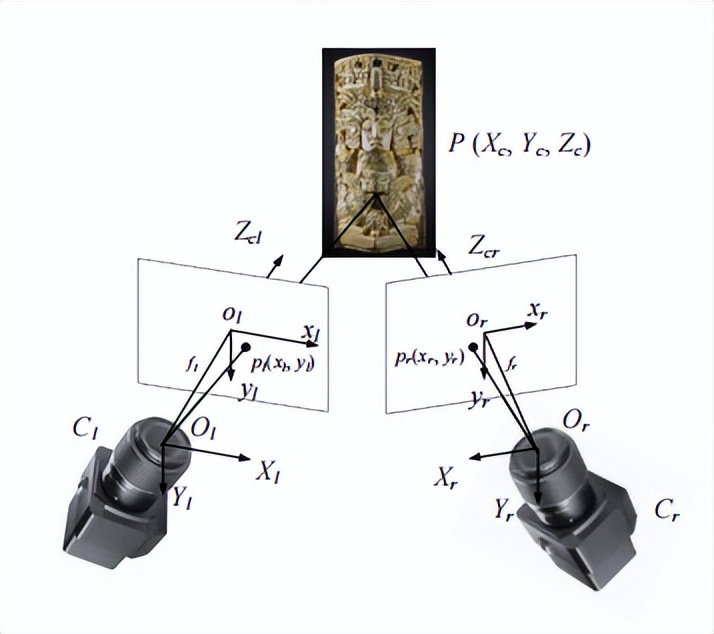
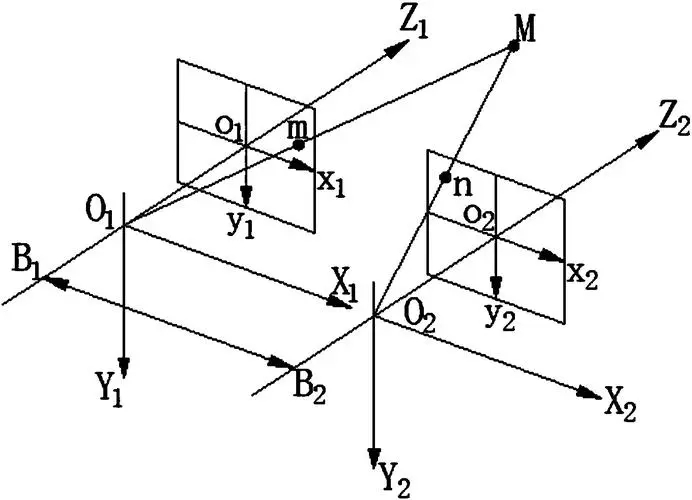
双目视觉系统的成像模型如下图所示,空间三维物体分别向左右两侧的相机平面同时进行投影,得到两张不同视角图像 Z 1与 Z 2。
而三维测量是上述成像过程的逆过程,根据图像 Z 1与 Z 2上的对应点,以及左右两相机内部参数、畸变参数和左右两相机的外部参数计算物体的三维坐标。

用一个点来具体描述测量过程,空间一点 P 在左右两相机成像平面上的投影点分别为 pl 和 pr 。
通过左右两个相机的内部参数和外部参数可以计算投射线 Olpl 与 Orpr 在左侧相机坐标系中的方向与位置,最后根据三角测距原理即可得到空间点 P 的在左侧相机坐标系中的三维信息。
由此可见,双目视觉三维测量是从相机记录的图像出发,根据相机和双目视觉系统参数计算物体的三维信息。
相机是一个抽象的数学模型,描述的是空间物体的成像过程,常用的相机模型分为线性模型和非线性模型。
线性模型是一种理想的成像模型,其基本原理为透视投影。非线性模型是在线性模型的基础上,考虑了成像过程中产生的畸变,即在线性模型的基础上叠加了非线性的畸变。
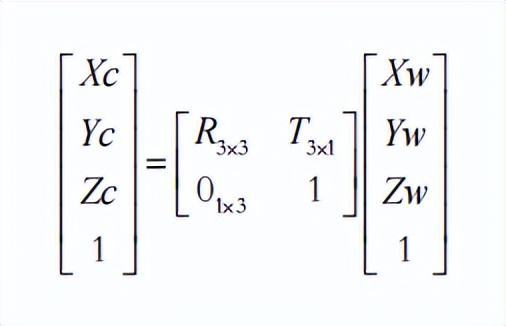
成像过程中涉及四个坐标系:相机坐标系、图像物理坐标系、图像像素坐标系、世界坐标系。
其中 Ow - XwYwZw 为世界坐标系,主要用以表示物体的位置信息, Oc - XcYcZc 为相机坐标系,相机的光轴与 OcZc 轴重合。
o - xy 为相机成像平面中的图像物理坐标系,相机光轴与成像平面的交点为原点 o , xoy 与 XcOcYc 平面平行。
相机通过CCD单元采集图像,并通过一个二维数组表示所拍摄的图像,图像大小与相机的分辨率相同。
为了与数字图像保持一致性,由此建立了图像像素坐标系 op - uv ,图像左上角的第一个像素为像素坐标系的原点 op。
相机的成像模型是描述空间点与其投影点(像素坐标)的一个映射过程,转换到相机坐标系中,齐次坐标下这个过程可以描述如下图式子:
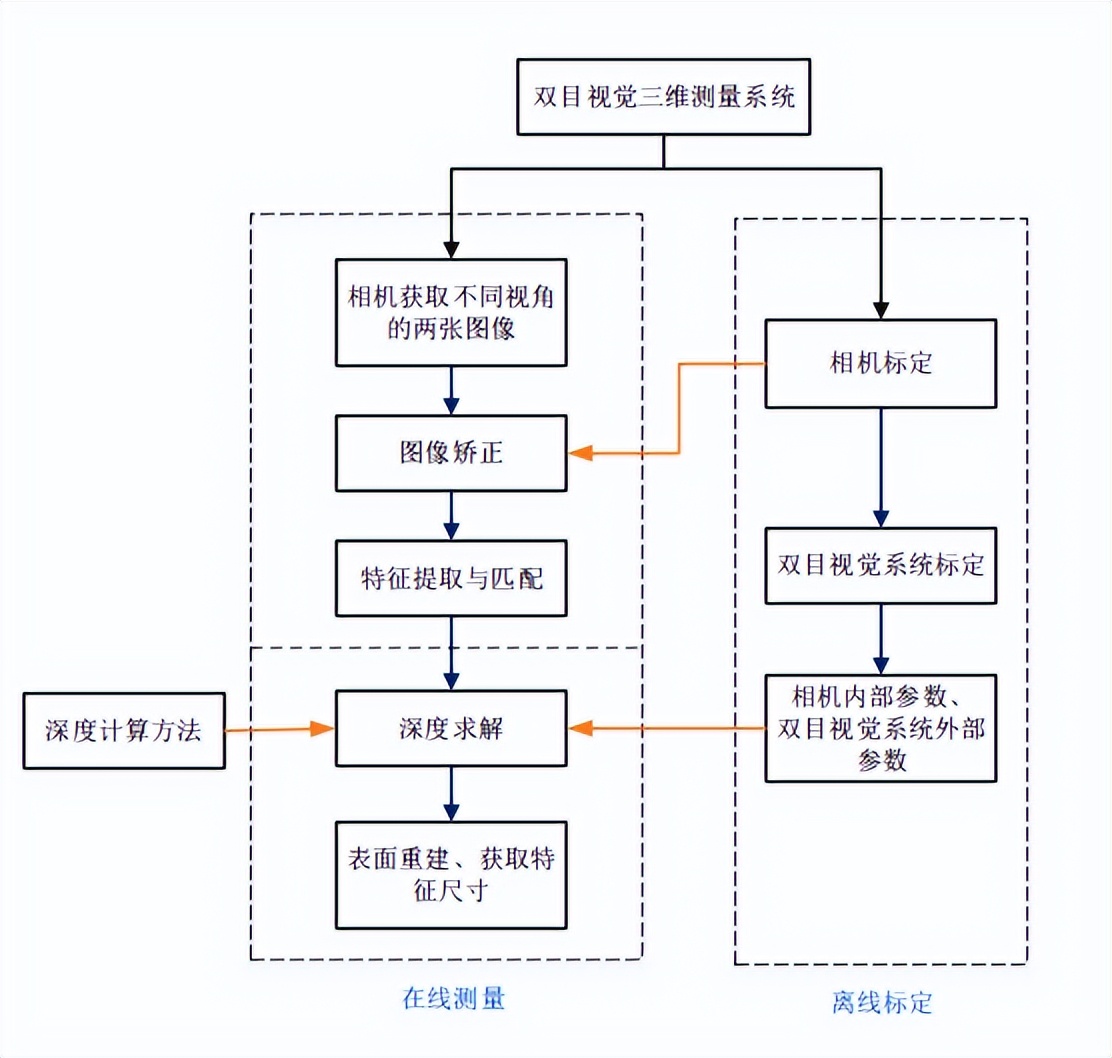
我们本篇文章详细介绍了双目视觉三维测量系统的系统组成和测量原理。
从单相机成像原理出发,详细介绍了双目视觉测量的原理和模型,给出了相机的标定模型,包含线性模型和相机畸变导致的非线性模型,介绍了常用的、主流的相机标定算法和双目视觉系统标定模型。
最后,详细介绍了极端环境下常用的立体匹配方法,并总结了各种方法的优缺点,为后续立体匹配提供理论依据相机标定是计算机视觉的一个基本步骤。
传统的基于标定物的标定方法由于需要手动旋转平移标定目标,导致数据采集时间过长,影响标定效率。
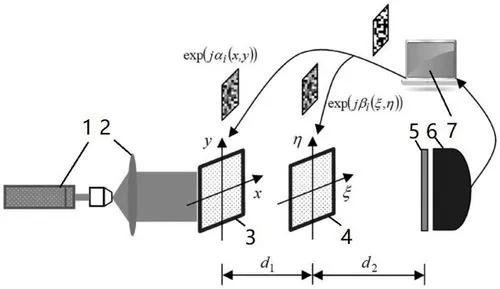
此外,标定物的质量也严重影响标定结果,为此我们提出了一种主动式相机标定算法。
利用LCD屏幕的高平面度、高分辨率、可控性等优点,将标准的标定棋盘格旋转平移至不同位置,并将该虚拟棋盘投影到一固定LCD屏幕,同时相机对该投影进行数据采集。
根据采集到的图像和三维标定物之间的单应性矩阵直接估计相机参数。

实验结果表明,当标定棋盘格数量为18时,图像重投影误差平均值仅为0.018个像素,明显小于目前最先进的方法。
另外,由于LCD屏幕显示图案的可控性,使标定过程完全自动化且标定结果更加精确。
但是,由于受到LCD屏幕的大小的约束,这里所提出的主动式标定算法仅适用于小场景三维测量或者重建。
但环境光过强或者过弱,会使相机采集到图像质量过差,无法检测到特征角点,导致标定效果差或者无法完成标定。这也是一个重难点,我们将在以后的工作中围绕该难点进行深入研究。
