文丨奇怪的玛丽莲
编辑丨奇怪的玛丽莲
前言
最先进的基于激光雷达的3D扫描和测绘系统专注于确保良好传感覆盖的场景,如无人机、轮式机器人、汽车或背包式系统。在某些情况下,更多的非常规传感器轨迹是自然而然的,滚动、下降或来回振荡,但关于这些的文献相对稀少。
过去开发的大多数实现都无法在这种情况下解决SLAM问题。提出了一个强大的离线批量SLAM系统,该系统能够解决更具挑战性的轨迹,其特点是入射角较弱,扫描时的FOV有限。
提出的SLAM系统是之前工作的升级版本,并将原始点和先前的姿态估计作为输入,但后者会受到大量漂移的影响。的方法是两阶段算法,在第一阶段,通过匹配平面多边形快速实现粗对齐。在第二阶段,利用基于图的SLAM算法进行进一步细化。
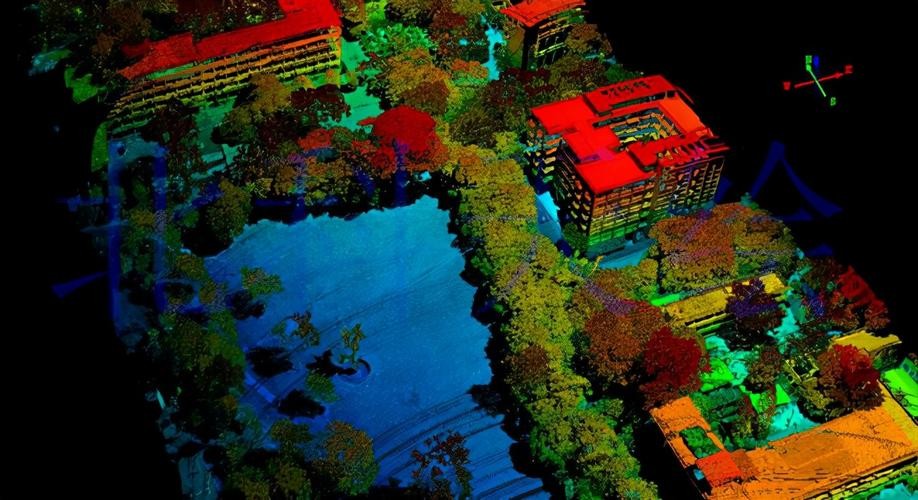
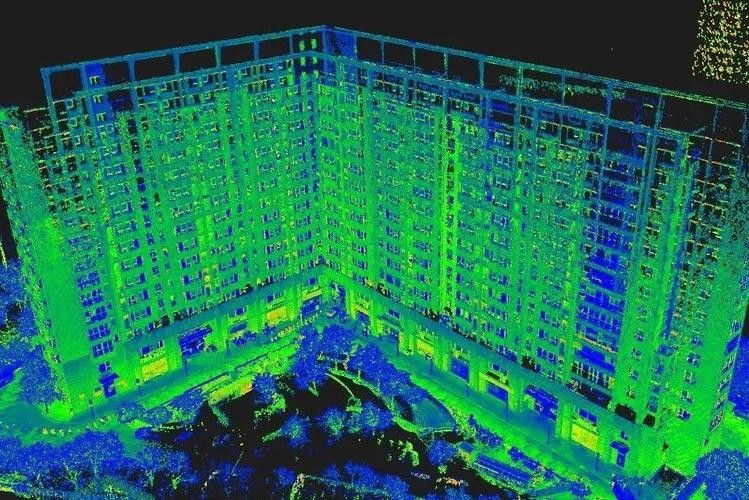
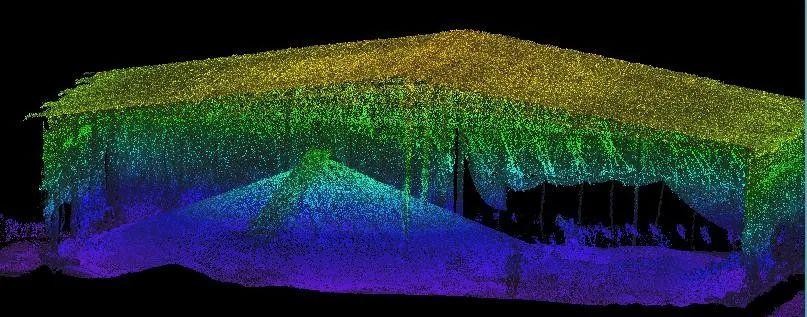
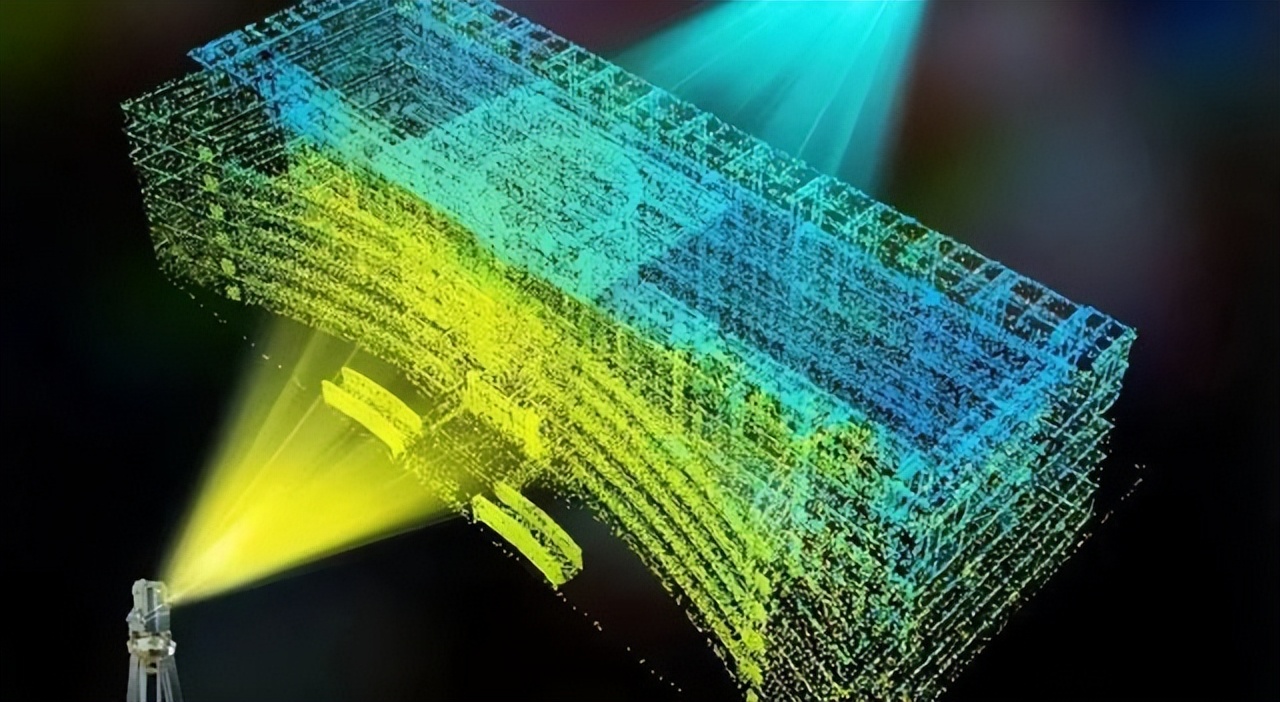
使用高分辨率地面实况地图在自己记录的数据集上评估算法的映射准确性,这些地图可从TLS获得。
移动系统
在3D传感、测绘和环境重建方面,移动系统越来越获得惊人的功能。有许多不同形状和大小的移动系统能够执行这些任务,无人机、轮式或履带式机器人或背包式系统。
实现其目的一个关键方面是估计系统惯性参考系,即系统局部坐标系相对于全局参考系。
该全局参考系在相应环境中的某个地方具有原点,通常使用系统的起始位置和方向进行初始化。通过在全球框架中表达局部测量值,系统能够创建环境地图,同时在其中定位自身。此过程称为同步定位和映射,并且仅在系统的初始姿势估计足够准确时才有效。
前面提到的机器人设计类型通常受到青睐,因为它们在使用相机或激光扫描仪感知环境时可以获得相当准确的先验姿态估计和可靠的覆盖范围。通常很容易执行基于激光的SLAM,无论是在线还是作为后处理步骤。
推断出先前姿势估计的不确定性,从而降低SLAM性能。使用照相机进行视觉特征追踪仅在良好的照明情况下有效,并且GNSS可能不可用。
使用IMU作为唯一的姿态估计设备通常也不是一种选择,因为噪声和漂移会导致大量测量误差的累积,这使得位置估计变得困难。即使是高端设备,航空系统,也必须与GNSS等其他参考相结合才能可靠。
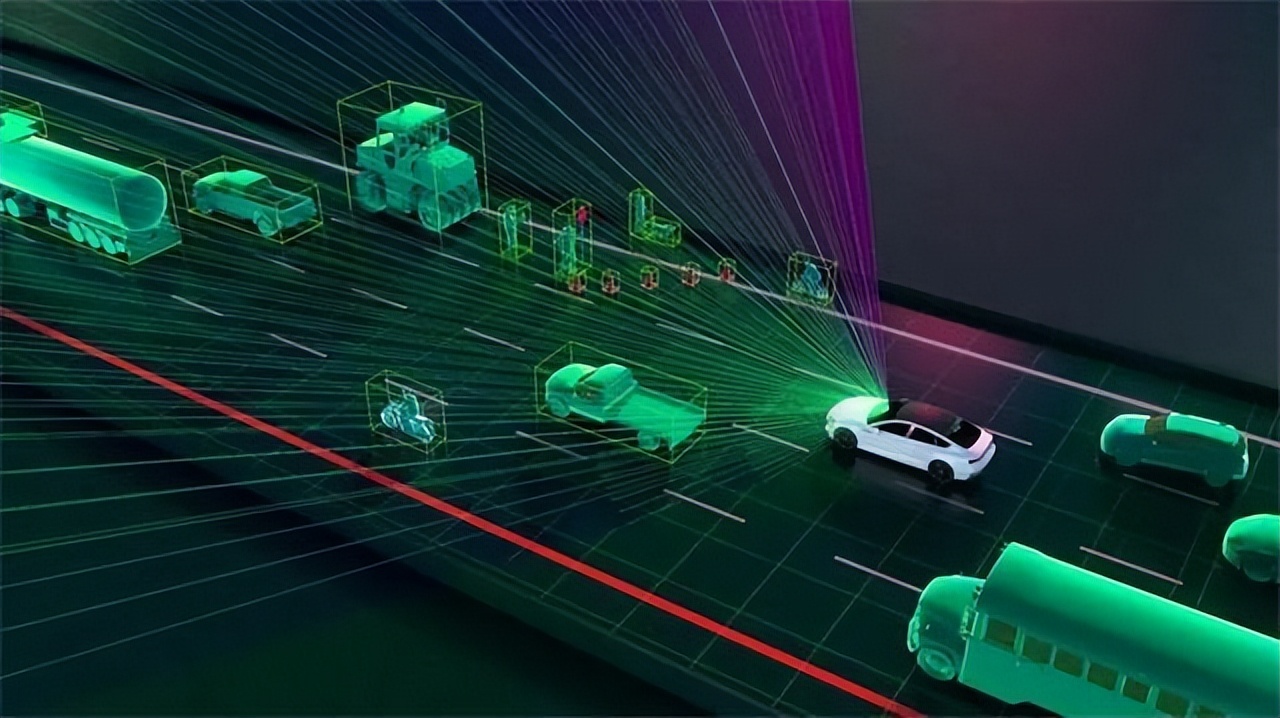
激光雷达
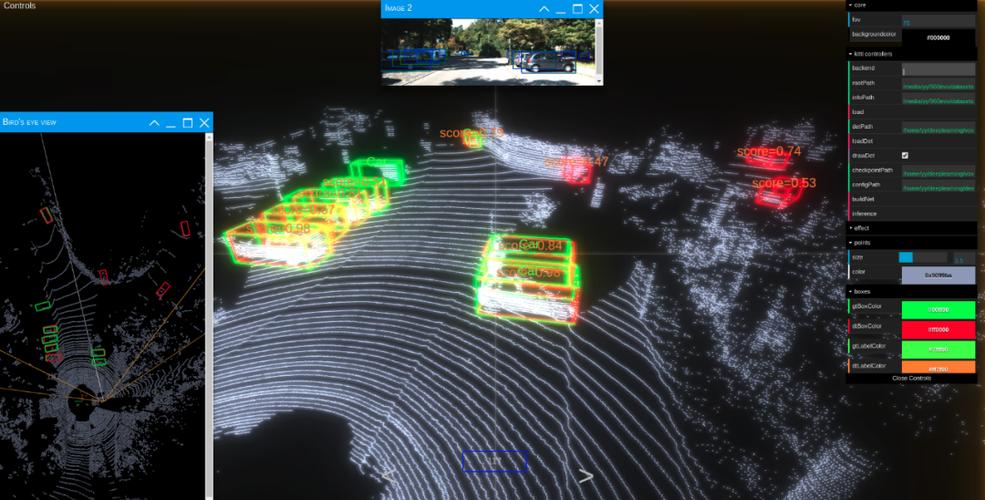
基于激光雷达的SLAM算法处理性能下降的能力对当前的移动系统设计及其应用提出了限制。将SLAM算法的功能扩展到更不寻常的场景为移动系统开辟了有趣的设计选择,尤其是在危险环境中。
目的是为SLAM问题提供一个通用且鲁棒的基于激光雷达的解决方案,该解决方案独立于执行的轨迹和传感器设置。注意到LivoxMid-40扫描仪的使用,它被认为是固态激光雷达在。Livox扫描器系列由于其非重复扫描模式,仅被视为“半固态”激光雷达。
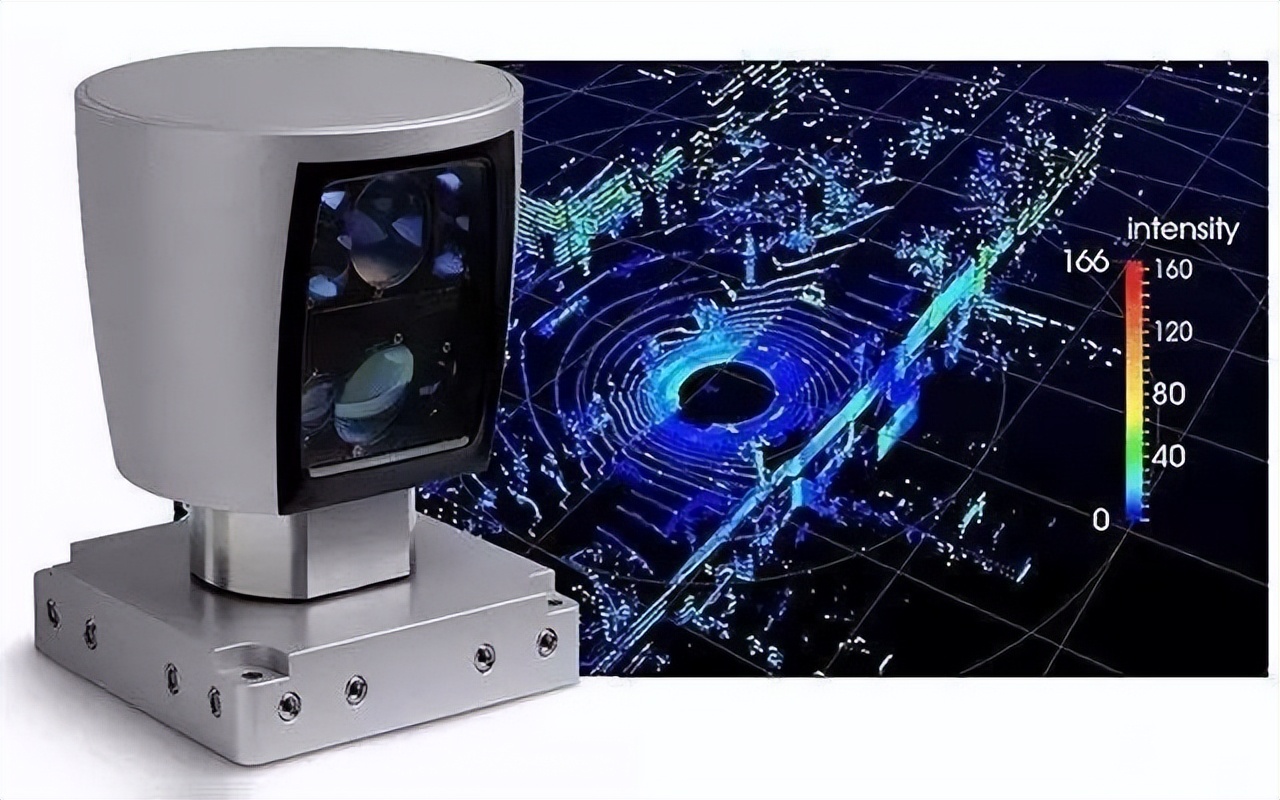
固态LiDAR在过去几年中引起了很多关注,因为它们在成本,可靠性和与传统机械旋转激光雷达相比的性能。传统的LiDAR基于移动传感器头的机电部件,而固态LiDAR依赖于微机电系统,光相阵列或Risley棱镜。
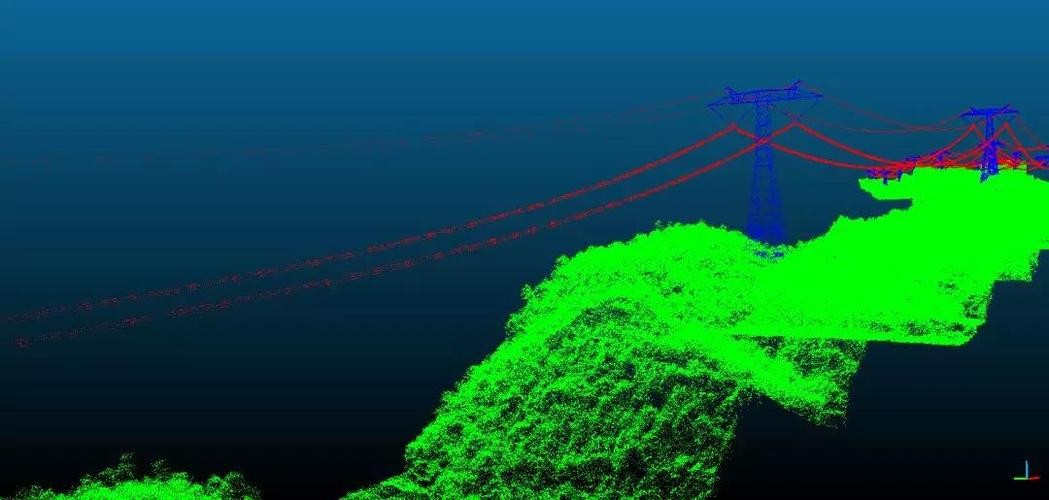
尽管固体激光扫描仪具有潜在的优势,但它对已建立的SLAM算法提出了新的挑战,小视场,不规则扫描模式和非重复扫描使特征提取更加困难,以及运动模糊增加。在这项工作中,通过假设平面结构在环境中可用来应对这些挑战。
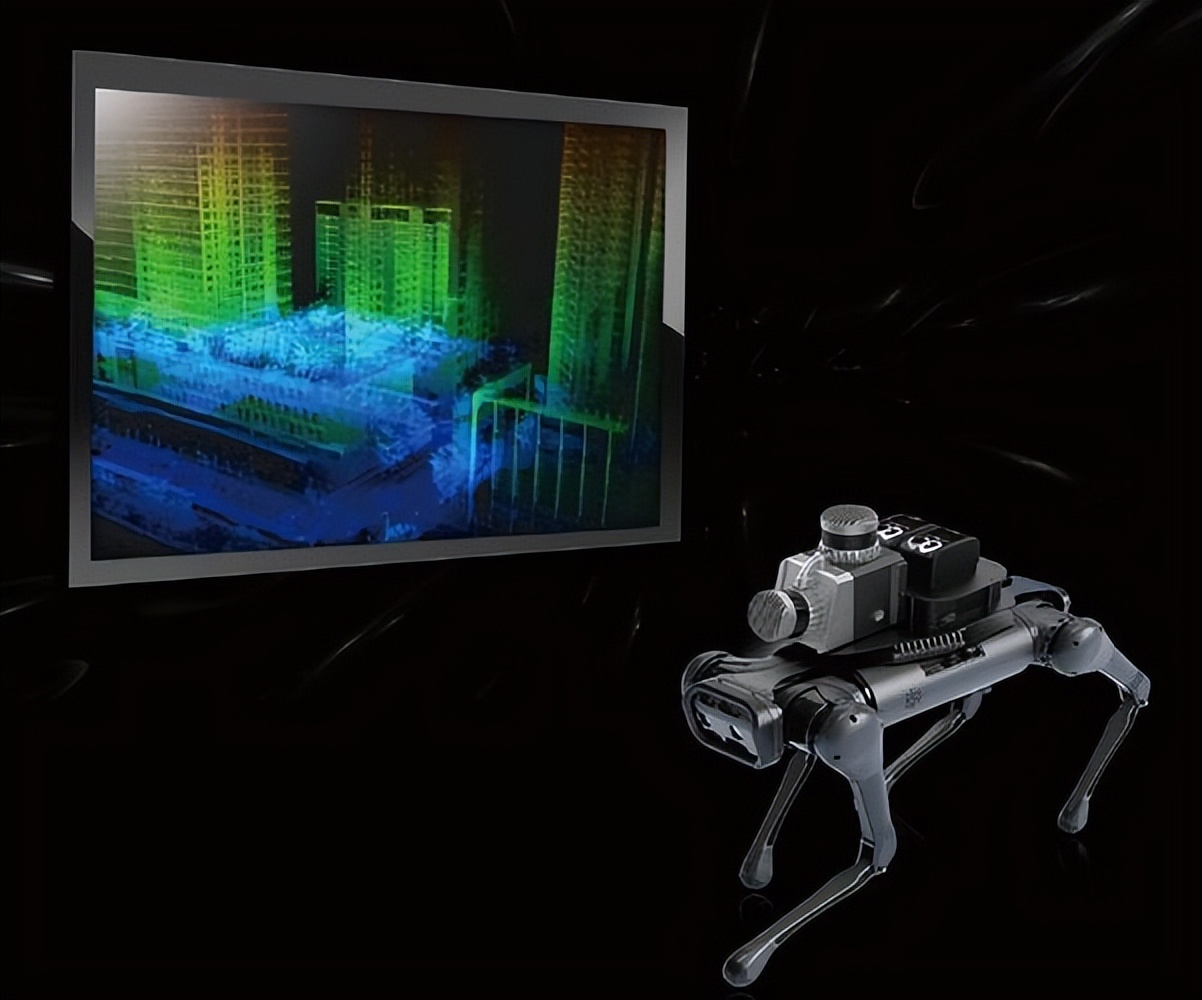
由于飞机的使用,设想的应用是在人造环境中,有倒塌危险的旧建筑物、狭窄的地下隧道、建筑工地或矿井。许多移动扫描系统都可以获得准确的姿态估计,以及良好的传感覆盖范围。提出了四个非常有趣的实验设置,它们不符合这些条件。
每种场景的主要传感器都是一台LIVOXMID-100激光扫描仪,由于其有限的视场和独特的扫描模式,这很不方便。可通过三个IMU和电缆卷筒上的旋转编码器进行先前的姿态估计。
传感器
将传感器用作钟摆,在行走时来回摆动。机器人从T265跟踪摄像头获得先前的姿态估计,该摄像头使用自己的内部IMU。将传感器在平坦的地面上滚动。仅基于IMU的方法具有三个单元来估计系统的姿势。
该方法结合了两个流行的滤波器,并通过将球体的旋转速度和半径与其行进距离相关联来估计位置。滤波器中存在进一步的约束,以考虑球体的滑移和滑动效应。
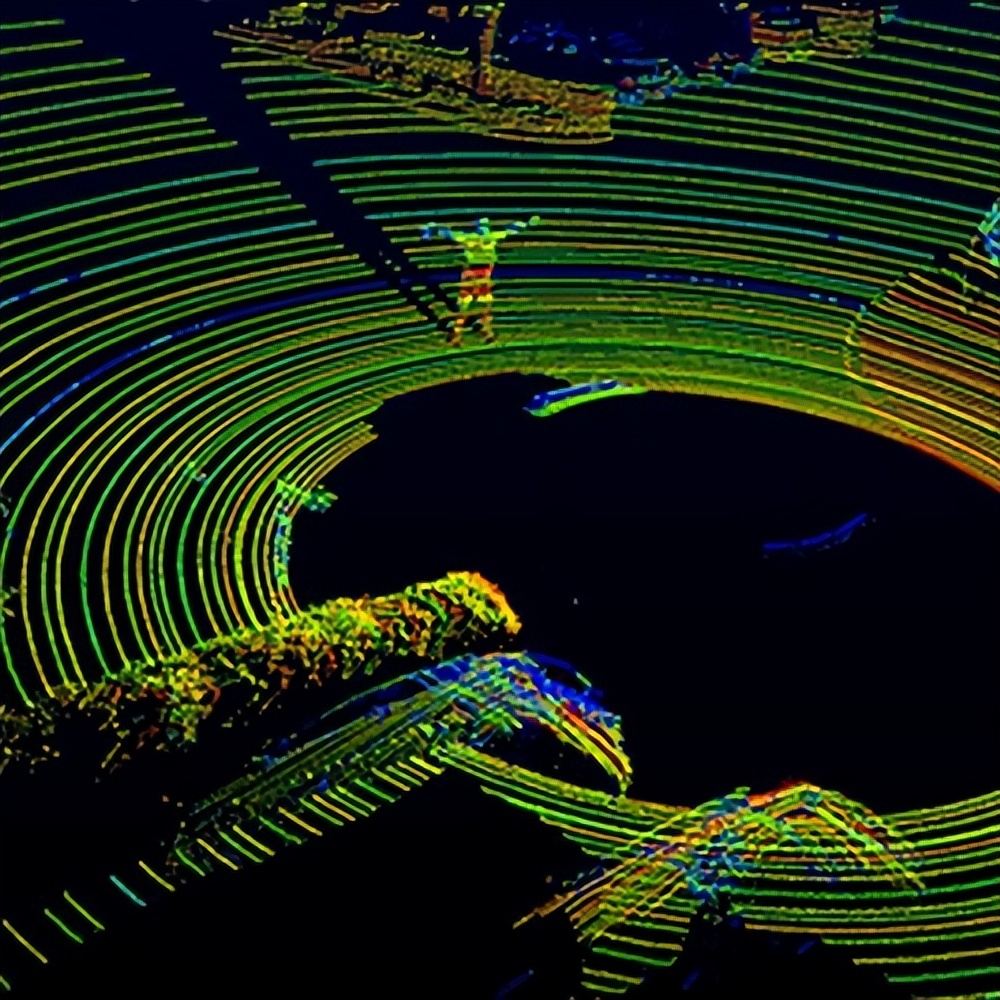
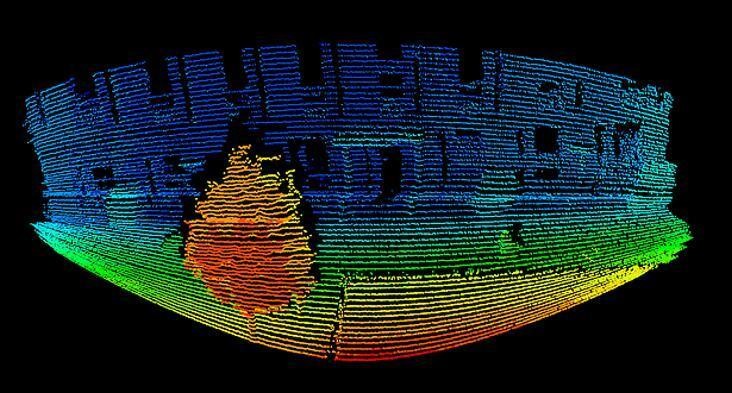
重复前面的实验,但用3D传感器代替2D传感器,该传感器以平面切片的形式测量环境的一部分。
旋转平面切片会导致场景的3D重建。对于姿态估计,使用旋转编码器和单个IMU。先前的姿势估计会受到大量噪声和漂移的影响。有些场景比其他场景更困难,因为机器人运动机制导致传感器以五个甚至所有六个自由度移动。
能够处理更具挑战性的轨迹所施加的不利条件,其中第一阶段使用基于多边形的方法进行快速粗略对齐,使用基于图的方法进行缓慢的进一步细化。通过地面实况点云评估结果地图的准确性,这些点云可从高精度地面激光扫描获得。
系统概念、方案
许多最先进的移动系统3D扫描和映射方法都基于轮式机器人、无人机或背包式解决方案。关于具有更多非常规轨迹的移动扫描系统的文献相对稀少。
实验室更频繁地使用“RADialLasER扫描设备”,“激光测绘单向导航执行器”,以及另一份关于在人造环境中滚动3D传感器的出版物。RADLER是一款改装型独轮车,将SICKLMS141二维扫描仪固定在车轮上。
它是最早使用与运动相同的旋转来驱动传感器的系统之一。通过使用内部飞轮采用自驱动运动方法扩展了这一想法。另一个值得注意的趋势,尽管到目前为止只是一个概念,是欧洲航天局对能够进行SLAM的球形机器人的兴趣,称DAEDALUS。
DAEDALUS一起自主探索月球上的地下洞穴和熔岩管,强调了这种系统设计在危险环境中的潜力。更多使用非常规轨迹扫描移动系统的示例包括Zebedee,安装在弹簧上的手持式二维测距扫描仪,使用IMU或VILMA,一种仅使用范围测量进行定位的无IMU滚动系统。
它后来发展成为一个名为“ZEB-Revo”的商业解决方案。徕卡还提供用于移动扫描目的的手持式传感器,其BLK2GO。在基于激光的SLAM方面,许多自由度的算法都可用,通常基于众所周知的迭代最接近点算法。
这是在这项工作中使用的方法,作为额外的注册后步骤,以减少第一个扫描匹配阶段的累积错误量。另一个最近基于连续时间图的框架是“IN2LAAMA”,能够同时在激光扫描仪和IMU之间进行定位、映射和外部校准。
离线处理方法
它是一种针对360°FOV多通道LiDAR设备优化的离线批处理方法,并且已使用VelodyneVLP-16进行了广泛测试,但不适用于最近出现的固态激光扫描仪。还存在基于连续时间图的在线方法,使用多级分层图组织和优化系统姿势。
该方法通过基于多分辨率的基于曲面的配准,实现了与类似的离线批处理方法相当的精度。该方法也针对传统的多通道激光扫描仪进行了优化,并已在精心控制的微型飞行器上进行了测试,从而确保了良好的覆盖范围。
存在更多基于激光的SLAM方法,这些方法不像ICP那样仅依赖于点对点优化。流行的基于模型的优化方法通常处理在环境中查找平面,因为考虑平面比仅考虑点对异常值和噪声更可靠。
利用平面存在的基于激光的SLAM方法的其他例子包括。与类似的注册程序是,它使用平面到平面对应进行预注册和之后的点对面对应,它使用点对点以及基于其可用性的平面到平面对应关系。
两种非常有趣的SLAM方法更专注于大规模生产的LiVOX设备,它们是“Loam-livox”和“Livox-mapping”。前者基于著名的LOAM算法,而后者则由Livox直接提供。
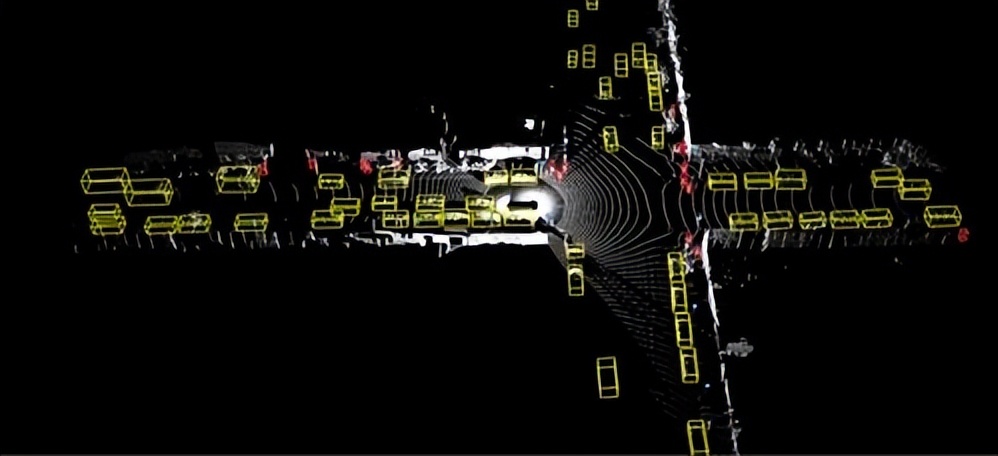
两者都特别针对小型FOV设备进行了优化,并提供了一种特征提取方法,适用于永不重复的花形扫描模式。它们的设计目的是将它们用于自动驾驶汽车,与这项工作相比,自动驾驶汽车遵循更简单的轨迹。
SLAM方法
该方法基于在扫描中查找平面多边形并将其与全局模型进行匹配。将以之前的工作为基础,并引入一些更改。算法的第二阶段是“半刚性SLAM”,这进一步减少了第一阶段的累积配准误差。
这是一种连续时间方法,其中使用部分连接的姿势图同时优化每一帧。表示SLAM系统信息流的框图,包括这项工作中所做的添加,一些基本推导保持不变。
结论
非常规轨迹仍然给当前的SLAM算法带来问题,特别是在使用低FoVLiDAR时。构建了一种灵活的SLAM方法,展示了可靠地记录具有大规模姿态估计误差的非常规轨迹的能力。
用三种不同的非常规运动测试了的SLAM系统:滚动、摆锤和旋转起重机下降。根据之前的精度评估,在地板上滚动是最困难的场景。系统的球壳增加了距离测量的噪声和异常值。低重叠使得扫描匹配变得困难,即使使用多边形也是如此。
与其他扫描方法相比,使用这种轨迹类型的SLAM的成功主要取决于初始姿态估计。由于平移和旋转中误差的大量累积,此场景的初始姿态估计最困难,这使得SLAM特别困难。RADLER似乎在准确性方面有最好的结果。
参考文献
ArzbergerF,BredenbeckA,ZeveringJ,BorrmannD,NÃ2021/1chterA。迈向用于人造环境中移动扫描的球形机器人。ISPRS开放摄影测量和遥感。100004;<>:<>
BorrmannD,JörissenS,NuchterA。Radler–RADialLasER扫描设备。在:国际实验研究论文集。阿根廷布宜诺斯艾利斯;2020。页码:655-664
ZeveringJ,BredenbeckA,ArzbergerF,BorrmannD,NüchterA。LUNA-A激光测绘单向导航执行器。在:实验机器人国际研讨会。马耳他瓦莱塔:ISER;2020。第85-94页
BosseM,ZlotR,FlickP。Zebedee:弹簧安装式3-D距离传感器的设计,应用于移动测绘。IEEETransactionsonRobotics。2012;28(5):1104-1119
BorrmannD,ElsebergJ,LingemannK,NüchterA,HertzbergJ。具有扫描匹配的全球一致3D映射。机器人和自动化系统。2008;56(2):130-142