续《零偏原创|双捷联余度系统故障诊断方案分析》(上)(中)
2 计算消耗故障判别的基本思路如下图所示:首先,将各个轴上的敏感器的输出量两两相减的结果分别与设计的阈值进行比较;其次,生成相关事件的组合;最后,通过判别准则确定是否是故障。
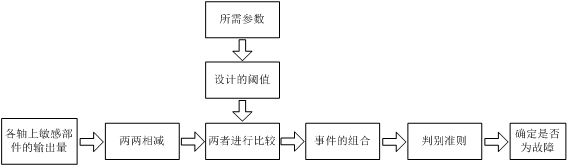
图5 故障判别的基本思路
在整个故障判别的过程中,计算消耗主要有两部分:一是设计阈值所需要参数的计算;二是确定是否为故障的决策过程中。下面分别进行讨论。
2.1 参数的计算消耗综合考虑各种因素的影响,将阈值设计为:

其中

。

为修正系数,

是一个与给定误检率相关的参数,

是一个与各种误差因素的标准差相关的参数。

和

可以通过大量的仿真试验或一些经验值得到,而为了得到一个与给定误检率相关的参数

需要列出可靠性计算公式与给定误检率相关的方程。这样,参数的计算消耗主要部分就是计算参数

的消耗。下面采用数值分析中解非线性方程常用的 Newton法[6],从数值的角度分析方程解的收敛速度,进而比较不同故障管理方案之间参数的计算消耗。
2.1.1 N 中取 K 表决方案考虑一度故障时,令

其中, 为给定误检率, 为与给定误检率相关的参数。则有


易知,在方程根的某领域内

连续且

因此在靠近方程根的附近取初始值

利用 Newton法迭代公式

可以得到

其中

由此可以求出方程的近似解。
考虑二度故障时,令

其中,

为给定误检率,

为与给定误检率相关的参数。则有


易知,在方程根的某领域内

连续且

因此在靠近方程根的附近取初始值

利用 Newton法迭代公式,可以得到

其中

由此可以求出方程的近似解。
2.1.2 混合型配置方案考虑一度故障时,令

其中,

为给定误检率,

为与给定误检率相关的参数。则有


易知,在方程根的某领域内

连续且

因此在靠近方程根的附近取初始值

利用 Newton法迭代公式,可以得到

其中

由此可以求出方程的近似解。
考虑二度故障时,令

其中

为给定误检率

为与给定误检率相关的参数。则有


易知,在方程根的某领域内

连续且

因此在靠近方程根的附近取初始值

利用 Newton法迭代公式,可以得到

其中

由此可以求出方程的近似解。
考虑到解的取值范围应该在 0与 1之间,同时为了比较不同方程解的收敛速度,现取迭代的初值均为 0.1,即

,

,

,

要求迭代达到的精度为
,
,
,
并且给定误检率

。各方案经迭代得到的计算结果见表 3。
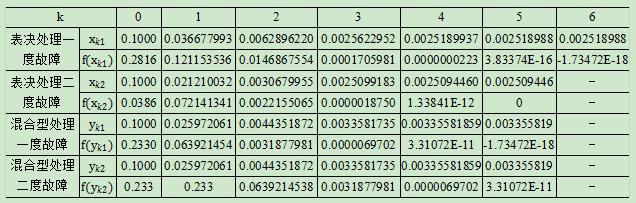
表 3 各方案经迭代得到的计算结
从表 3中可以看出,在相同的计算条件下,采用表决方法处理一度故障时,需要经过六次迭代达到所要求的精度,而其他方案均经过五次迭代便达到所要求的精度。这说明,采用表决方法处理一度故障时的计算消耗较多。但总体来说,各个方案的计算消耗相差不大。
2.2 决策过程的计算消耗计算消耗的另一个主要部分是故障决策过程中的计算消耗。在一个故障诊断周期中,需要把各个轴上敏感器的输出量两两相减与设计的阈值进行比较,生成一定的事件组合,最后做出故障决策。虽然一个故障诊断周期中只有几次比较计算,但由于在实际使用过程中,一个故障诊断周期非常短(一般为毫秒级),如果飞行时间足够长的话,这些计算量还是不能忽略的。
2.2.1 N 中取 K 表决方案由之前的分析可知,无论是处理一度故障还是二度故障,N中取 K表决方案均要利用到测量同一物理量的四个敏感器的输出量,它们之间两两相减共有六对。这样,在每个故障诊断周期中有六次比较的过程。
2.2.2 混合型配置方案在混合型配置方案的初始阶段中处理一度故障时,利用到测量同一物理量的三个敏感器的输出量,它们之间两两相减共有三对。这样,在每个故障诊断周期中有三次比较的过程。处理二度故障时,首先利用到三个敏感器的输出量来检测和定位第一个故障,切换备份部件并使其参与到表决过程后,使二度故障的识别过程中有六次比较的过程,这样在一个故障诊断周期中,共需要九次比较过程。假设,故障诊断周期时长为 5毫秒,总共飞行时间为 900秒,则在整个飞行时间内有 180000个(900秒/0.005秒)故障诊断周期。在整个飞行时间内,N中取 K表决方案总共需要做出1080000次(180000*6)比较;而混合型配置方案处理一度故障需要做出 540000次(180000*3)比较,处理二度故障需要做出 1080000 次(180000*6)比较。由此可以看出,在故障决策过程中,混合型配置方案处理一度故障时的计算消耗最少。
2.3 总的计算消耗表

4 总体计算消耗
综合以上的分析,各故障管理方案的总体计算消耗如表 4所示。可以得到以下结论:
(1)在一个故障诊断周期内的总体计算消耗由多到少依次为:N中取 K表决方案处理一度故障,混合型配置方案处理二度故障,N中取 K表决方案处理二度故障,混合型配置方案处理一度故障;
(2)若将二度故障的发生看作为小概率事件,即在仅考虑一度故障的条件下,混合型配置方案的计算量相对 N中取 K表决方案要少,所占产生的计算消耗较少。3 故障诊断效果分析故障诊断研究的直接目的是为了提高诊断的精度和速度、降低误检率和漏检率、确定故障发生的准确时间和部位,并估计出故障的大小和趋势[7]。可见,误检率和漏检率是评价一个故障诊断方案的重要指标之一。下面,对各故障诊断方案的诊断效果进行分析比较。仿真中,数据采用航天某所提供的双捷联惯导系统中加速度计和陀螺输出的理想值,整个飞行段共飞行 900秒,故障检测周期为 5毫秒。仿真所得到的误检率和漏检率计算方法为:


3.1 无故障注入时故障诊断效果对比
在给定误检率

并且不注入故障的条件下,各个故障诊断方案仿真 100次,比较它们的误检率。具体仿真结果见图 7~图 9,其中横轴代表仿真第 K次(K从 1到 100),纵轴代表该次仿真的误检率。

图 6 N中取 K表决方案对 X轴加速度计的诊断结果
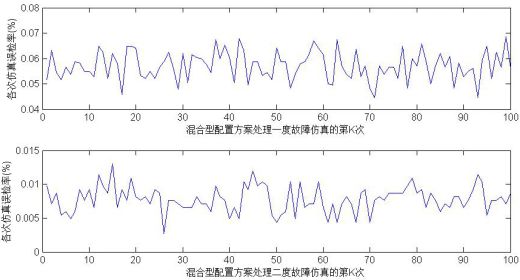
图 7 混合型配置方案对 X轴加速度计的诊断结果
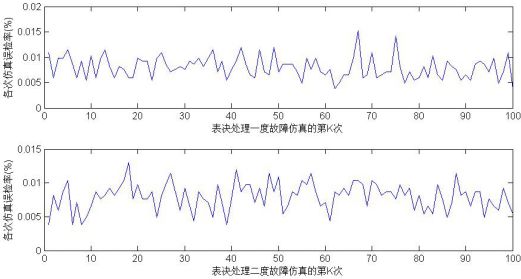
图 8 N 中取K 表决方案对X 轴陀螺的诊断结果
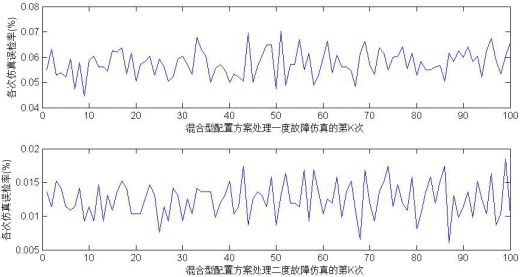
图9 混合型配置方案对X轴陀螺的诊断结果
由仿真结果可知,表决方法处理一度故障时,对安装在 X轴上的加速度计的平均误检率为0.00787%,对陀螺的平均误检率为 0.00801%;表决方法处理二度故障时,对安装在 X轴上的加速度计的平均误检率为 0.00802%,对陀螺的平均误检率为 0.00797%;混合配置方案处理一度故障时,对安装在 X轴上的加速度计的平均误检率为 0.0571%,对陀螺的平均误检率为0.0575%;混合配置方案处理二度故障时,对安装在 X轴上的加速度计的平均误检率为0.00777%,对陀螺的平均误检率为 0.0124%;对于 Y、Z轴上的加速度计和陀螺,诊断结果类似。
从以上结果可以看出,在没有注入故障的时候,虽然各个故障诊断方案的误检率均满足给定误检率的要求,但是相比较而言,混合配置方案处理一度故障时的误检率较大,而 N中取 K表决方案无论是处理一度故障还是二度故障方面误检率都相对较小。所以,综合以上分析,N中取K表决方案在无故障注入的条件下表现更优。
3.2 有故障注入时的诊断效果对比
仿真中,给定误检率

各个故障诊断方案仿真 100 次。故障的幅值范围设定在

其中

为加速度计或陀螺测量范围的上、下限,

为加入噪声的标准差。故障的加入在之后是随机的,在整个测量过程中的发生概率设定为
2‰。具体的仿真结果见表 5。
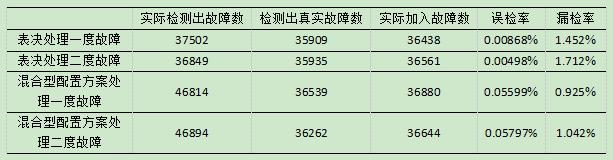
表 5 注入故障后的仿真结果
从仿真结果可以看出,各种方案的误检率均满足给定值。从整体看,N中取 K表决方案的误检率小于混合型配置方案,但漏检率高于混合型配置方案。评价某个故障诊断方案好坏的一个重要标准就是在满足给定误检率的前提下使漏检率尽可能地小。因此,混合型配置方案更优。
4 结论综合以上分析,不注入故障时,表决和混合型配置方案均满足给定误检率要求,但表决方案的误检率更低;注入不同的故障时,在满足给定误检率条件下,混合型配置方案的漏检率更低。可以看出,表决方案和混合型配置方案各有优缺点,适合不同的故障情况。
参考文献
[1].曹晋华,程侃.可靠性数学引论[M].第二版,北京:高等教育出版社,2012.45-52.
[2].云奔.四个双自由度陀螺捷联惯导系统冗余设计研究[A].见:2003 年惯性仪表与元件学术交流会论文集[C].中国辽宁丹东,2003,232-245.
[3].王社伟.容错导航的系统的可靠性分析[D].北京:北京航空航天大学博士学位论文 1999.
[4].川琦義人.可靠性设计[M].北京:机械工业出版社,1988.69.
[5].刘旭东,何传五,李东.捷联式惯性部件冗余设计[J].中国惯性技术学报,1995,3(4):44-49.
[6].颜庆津.数值分析[M].第三版,北京:北京航空航天大学出版社,2010.75-80.
[7].赵翔,李著信,萧德云.故障诊断技术的研究现状与发展趋势[J].机床与液压,2002,2002(4):3-6.
《零偏原创|双捷联余度系统故障诊断方案分析》完结!!!