3月14日,pi日。
这个古老而迷人的数值,引得人类几千年最高智慧为此探索,孜孜不倦,至今仍未停歇。
关注明说的你也许产生了疑问,这与足球有什么关系?
今天要讲的,就pi与足球的故事,并不只是因为,足球是圆的。
一、pi的起源
祖冲之图,来源百度百科
说起pi的起源,99%的中国人的第一反应一定是祖冲之,不仅仅是因为他在世界数学史上的地位,更是他在小学课本上的地位。
这个人,让无数八零后从那时起,开始对数学着迷,从此走上了一条不归路。
明说(微信号:mingshows)同样也是其中之一,拜这老乡所赐,明说小时候还是对数学有点着迷,经过五六年级的封闭集训,也才加了华罗庚金杯少年数学邀请赛,现在获奖证书已经不知在哪个角落结网了。
题外话不多说,在祖冲之前面,公元前1500多年,巴比伦人已经将圆周率算到了25/8=3.125,古埃及算出了32/9=3.16,九章算术则直接用了三分之一的=3.33...
此后,三国的刘徽(那个时候能出个数学家也真不容易)用自创的割圆术算出了3.1416,祖冲之这时候才出场了,以雷霆万钧之势,直接将pi逼到了一个小角落3.1415926-3.1415927,精度纪录在世界上保持了一千多年。
可惜,祖冲之那个时代没有互联网,否则他给科学界带来的轰动将远远比引力波还要爆炸。
在遥远的西方,也有人在探索,采取与割圆法相近的办法不断将pi精度提高,在牛顿和莱布尼茨的微积分之后,pi的计算开始加速。
时间到了18世纪,一个重要的人物即将登场。
二、布丰扔针

布丰,图片来源于百度百科
这个布丰的英文名也是Buffon,但他和意大利门将布冯可没有什么关系。
八零后仔细回忆一下,应该对此人有些印象,他写的《松鼠》也在小学语文课本里。
1707年出生的法国人是一个跨界天王,大学学法律,然后又学了两年医学,27岁时,认识了一位英国高富帅,然后一起开始游历。
法国、瑞士、意大利,两个年轻男人在欧洲大陆并肩留下了足迹。
这时候,第三个男人横空出世,他就是这个高富帅的家庭教师,德国学者辛克曼,他的博学一举征服了布丰。
于是布丰开始刻苦研究博物学,写出了巨著《自然史》,包含了地球、人类、植物、动物、矿物等。
然而,我们今天要说的,却是布丰和pi的情缘。
1777年,70岁的布丰已经无法轻松地纵横在山野间了,但在斗室,照样能用思想穿透时空。
“设我们有一个以平行且等距木纹铺成的地板,现在随意抛一支长度比木纹之间距离小的针,求针和其中一条木纹相交的概率。”

这就是著名的布丰投针问题。
这个问题的解,现在看来并不难,但在当时却引起了科学界的轰动:
P=2L/pi*a(其中L是针的长度,a是平行线间的距离,pi是圆周率)
将这个公式变换,就得到了pi=2L/Pa,也就是说,在特定的纹路上扔足够多的针,可以计算出pi的数值。
此后100多年里,一些有wu志liao之de士ren开始在自家地板上扔针,最多的人扔了5000次。

三、蒙特卡洛
布冯扔针问题,就是蒙特卡洛算法的起源。
对了,就是这个算法!阿尔法狗与李世石的人机大战,让蒙特卡洛算法一夜走红。不过,由于太多人给阿尔法狗著书立说,明说(微信号:mingshows)此处不多赘言。
说回蒙特卡罗算法,该算法在二战期间由美国原*弹子**研发团队的成员乌拉姆和冯·诺伊曼首先提出。
冯·诺伊曼用赌城摩纳哥的蒙特卡洛来命名,看来在提出之前,诺依曼已经赚了不少啊。
蒙特卡洛算法就是布丰扔针计算pi的抽象。
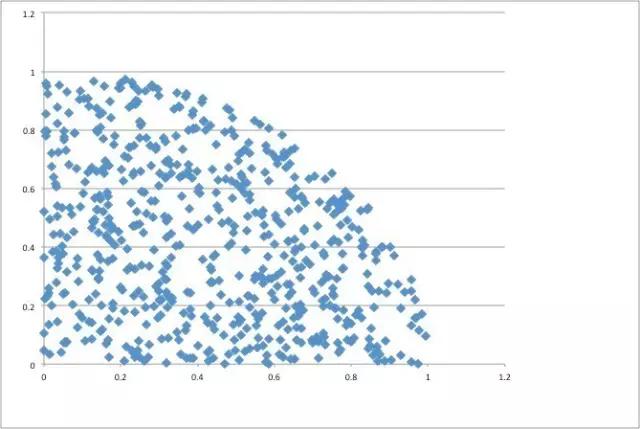
其基本思想是,首先建立一个概率模型,使所求问题的解正好是该模型的参数或其他有关的特征量. 然后通过模拟一统计试验, 即多次随机抽样试验统计出某事件发生的百分比,随着随即抽样次数增加,这个百分比越来越趋近于事件发生的概率。
举个最简答的例子,还是算pi,不用高深的工具,手头的excel生成两组随即数,再用一个简单的条件判断公式IF,就能够自己算出pi的近似值。明说(微信号:mingshows)自己玩了一下,有兴趣不会玩的读者可在文章下留言,索取攻略。
蒙特卡洛算法,把几何问题,转化为了概率问题。这也为什么是阿尔法狗能在围棋上运用蒙特卡洛算法得心应手。
四、足球沦陷?
阿尔法狗战胜围棋顶尖高手后,让不少人惊呼,人工智能的终极目标是谁?
最近,梅西刚刚被封了一个新绰号:“足球阿尔法狗”,然而,人工智能真的能攻陷足球吗?
其实他们早已经在磨刀霍霍了!

中甲开幕式上的“人机大战”
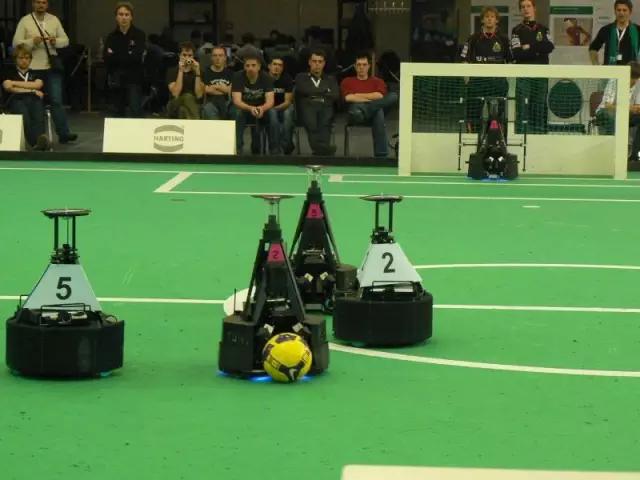
每年,全世界各地都在进行机器人足球赛,至今,这个比赛还是用来评估大学和公司的机器人算法和制造的工艺水平,但总会有一天,机器人要与真人发起一场足球大战。
人类有没有胜算?人类在人工智能前保留的最后智商优越感又能否留存?
让人惊出一身冷汗的事实是,不少足球机器人的定位系统,正是采用了与围棋机器人阿尔法狗一样的蒙特卡洛算法!
原理是,小型的机器人的足球行为,可以抽象为一个点在二维平面上的运动,一支队伍的足球行为,就是n个点在二维平面上的运动策略问题。
于是,足球机器人的当前位置可以看做粒子的密度模型,每个粒子是机器人在此位置定位的假设。
于是,足球,也就成了一盘围棋。
看到这里,小伙伴们是不是已经绝望了。
但不要惊慌,足球还是比围棋复杂的多,围棋的点位虽然高达361,也就是19x19,但其每个点位的坐标都是唯一确定的,虽然说每个字的可能落位选择集合庞大过了宇宙中的原子数量,但这总还是一个目前能计算出的有限量。
然而,对于足球,没有离散的点可以定位,人工智能的“足球狗”要想优化自己的动作对位置坐标不停细分,而足球也并非一个平面的运动,他其实是一个三维空间,22个人加一个球的运动问题。
这个问题,人工智能依然无解。
而就算有解,足球狗要想战胜足球人恐怕目前看来也是痴人说梦。
为了说明这个问题,明说(微信号:mingshows)请到了高中的同班好友、自动化领域青年才俊,毕业五六年就与朋友联合创办了目前行内领先的工业机器人研发与制造公司,珞石(北京)科技有限公司联合创始人韩峰涛,让他来解答一下足球机器人的问题。

韩峰涛说:
“目前世界上最大的机器人足球赛事是Robocup,分为4个组别: 小型组,中型组,平台组和类人组。
小型组的机器人其实只能算是一种小车,因为这种移动小车的控制算法已经很成熟了,因此,人工智能的成分最多。
从小型组到类人组,对运动控制的要求越来越高,人工智能所占比重降低。
中型组大一些,有一些活动的部件,抢到球之后可以护球,也可以射门。这个对人工智能和运动控制都有一些要求。

人们关注最多的应该是类人组的比赛,类人组统一使用法国Aldebaran Robotics公司的NAO机器人作为比赛机器人。
因为类人机器人的技术还处于非常初级的阶段,运动速度很慢,协调性也很差,所以主要瓶颈还在于运动控制技术。执行机构差,有好的人工智能也白搭。”
说到这里,大可放心了。
简而言之,足球是智力与体力结合的游戏,仅靠人工智能,无法战胜在身体上有着绝对优势的人类。
至少今晚,梅西和C罗可以睡个好觉了。
但明天太阳照常升起时,谁又知道会发生什么呢。
.......................................
向亲爱的PI致敬,向人类永无止境的探索致敬