
文|芝士派讲解员
编辑|芝士派讲解员

传统的下肢康复机器人体积大,佩戴复杂,需要将患者移动到指定位置,随着科技的发展,出现了一种易于移动且适用于不同身高载体的新型单腿下肢康复机器人。
机械腿具有可变的工作空间,其旋转接头设计有机械限制器,分析了S-LLRR的串联构型,并基于连续直线运动训练进行了轨迹规划。

仿真和实验结果表明,S-LLRR具有较大的工作空间和较好的运动精度,主动参与度评价模型的准确率可以达到85%以上。
传统下肢康复机器人有诸多缺点,怎样才能将其升级优化呢?

①
●○康复机器人的研究○●
衰老、事故和环境污染会增加患神经性脑损伤疾病的风险,脑卒中是一种常见的获得性脑损伤疾病,每年脑卒中导致的死亡或致残人数显著增加,治疗后常导致肢体长期功能障碍,尤其是偏瘫和轻偏瘫。
在一些研究中,为了避免刚性结构造成的二次伤害,在下肢康复机器人的设计中考虑了柔性结构,但下肢康复机器人占用空间较大,不适合家庭使用,当中风患者早期无法移动时,使用起来会出现困难。

为了解决这一缺陷,研制出了一种基于混合机构的末端牵引式下肢康复机器人,具有结构紧凑、工作空间大等优点,适合急性期患者的康复需求。
由于终端牵引机器人与患者身体接触小,对下肢运动没有限制,导致训练时偏离预设的训练轨迹,另一方面,物理治疗和康复的成功主要取决于练习的连续性。

一些研究得出结论,康复机器人与传统疗法一样有效,但它们的成本效益阻碍了它们的吸收,降低其康复机器人的制造成本并增加其移动性对其应用非常有利。
随着人们对康复效率和康复服务的需求越来越高,激发患者积极参与训练过程的设计变得越来越重要。

利用人体生理信息已被证明是控制康复和辅助装置的有效方法,在建立下肢康复机器人系统时,通过结合生物电信号可以有效提高机器人的康复效果。
移动方便、适合不同身高载体的新型单腿下肢康复机器能够以满足患者的康复需求,S-LLRR的这种创新机制设计使其与其他下肢康复机器人不同。

表 1.与其他下肢康复机器人的机械结构比较。
在脑卒中患者早期康复阶段,坐/卧姿的下肢训练可以减轻患者臀部和腿部的重量负担,增加下肢关节的活动范围。
在此基础上,外骨骼机器人有利于提高康复训练的稳定性,单腿康复机器人比两条腿的康复机器人结构更简单,制造成本更低。

研究具有以下亮点:
(1)设计了一种结构紧凑、运动方便、制造成本低、机械腿可调的单腿下肢康复机器人,可与日常使用的车辆相结合,进行坐卧位的康复训练。
(2)设计基于沙模型的主动训练控制策略,重建患者的环境感知能力,提出了一种基于人体生理信息的积极参与评价模型,为患者提供更有效的康复训练。

基于连续直线运动训练,对康复机器人进行轨迹规划,设计基于沙模型的主动训练控制策略和基于生理信号的主动参与度评价模型。
对康复机器人的工作空间进行仿真,进行终端轨迹跟踪实验和疲劳度预测实验,验证了S-LLRR的运动性能和主动参与度评价模型的准确性。

②
●○材料和方法○●
基于一体化设计理念,S-LLRR主要由控制柜、升降机构和机械支腿组成,控制柜和升降机构集成在框架中以减小尺寸,车轮安装在底部,便于移动。
机械腿安装在框架外,患者可以将脚放在踏板上,并被魔术贴绑带*绑捆**,调整机械腿的适当高度和长度后,可以躺着或坐着进行人机协作康复训练。
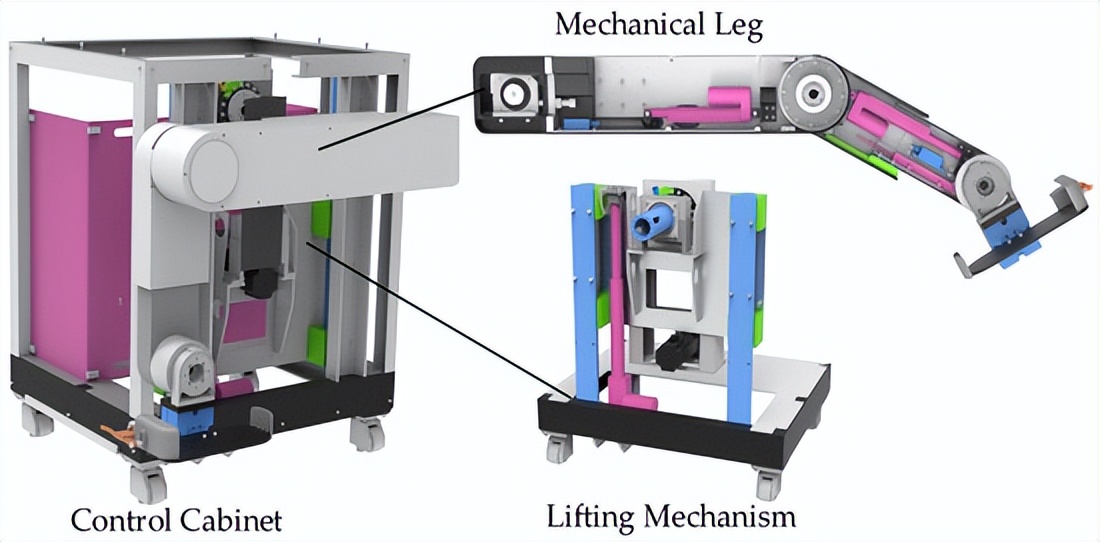
图1.下肢康复机器人的机理.
升降机构和髋关节组件设计升降机构是连接控制柜和机械支腿的重要部件,髋关节组件安装在两组垂直导轨上,垂直安装在控制柜底座上的电动执行器用于调节机械腿相对于地面的高度。
这种设计保证了机械腿可以适应不同高度的车辆,无需康复椅,从而降低了机器人的成本,简化了术后脑卒中患者的登机步骤。

图2.康复机械腿的髋关节组装。
机械腿由大腿、小腿、踝足三部分组成,通过膝关节总成和踝关节总成相互连接,通过髋关节总成与升降机构连接。
大腿部分的功能是配合人体下肢的髋关节,产生角球运动,大腿部分的功能是配合人体下肢髋关节进行角部运动,而大腿部分的长度需要调整以满足个性化需求。

图3.大腿和膝关节的传输部件。
同步滑块和电动执行器安装在小腿部分内部以使其伸缩,并通过膝关节缩小器连接到大腿部分。
康复机器人的踝足部分由踝关节驱动总成和脚踏板总成组成,踝关节处的力矩电机驱动脚踏板的旋转,脚踏板可以配合患者在踝关节矢状面进行康复训练。

图4.小腿可调机构。
在人体下肢的运动中,应尽量避免极端的关节运动,为了确保患者的安全,有必要在机械腿的旋转接头上安装限位装置。
根据人髋关节在矢状面的前屈幅,下肢康复机器人的运动范围设置为髋关节0°-140°,膝关节0°-150°,踝关节0°-65°。

图5.足部和脚踝组件。
现实的训练需求要求单条机器人腿部结构的康复机器人具有双侧下肢交流训练的功能,机械腿关节处设计了可移动的极限结构,可以使患者在左右腿康复训练之间切换。
髋关节传动总成上端的轴承座设计有固定限位块、移动限位块、滑动限位块三种结构。滑动限位块可以逆时针打开以滑动到 A 或 B 限位槽。

图6.髋关节止动器示意图。(a) 左腿康复训练的限位装置。(b) 右腿康复训练的极限装置。
髋关节和膝关节均采用皮带传动,可有效减轻冲击并吸收振动,当意外情况导致关节扭矩过载时,皮带与皮带轮之间的打滑可以起到一定的保护作用。
人机交互在康复机器人中至关重要,可确保安全性并增强设备控制性能,力传感器是人机交互的主要组成部分,可以在患者和康复设备之间提供有效的交互式反馈。

图7.S-LLRR使用过程和控制流程图。
下肢康复机器人的控制系统主要分为交互端、控制中心、采集卡、执行器、传感器四部分,大腿角度传感器和髋关节角度编码器判断髋关节运动角度。
小腿角度传感器和膝关节角度编码器可用于判断膝关节运动角度,三维力传感器和角度传感器安装在脚踏板组件的侧端,可以收集患者脚部的压力数据和角度信息,这是力反馈和位置反馈的基础。
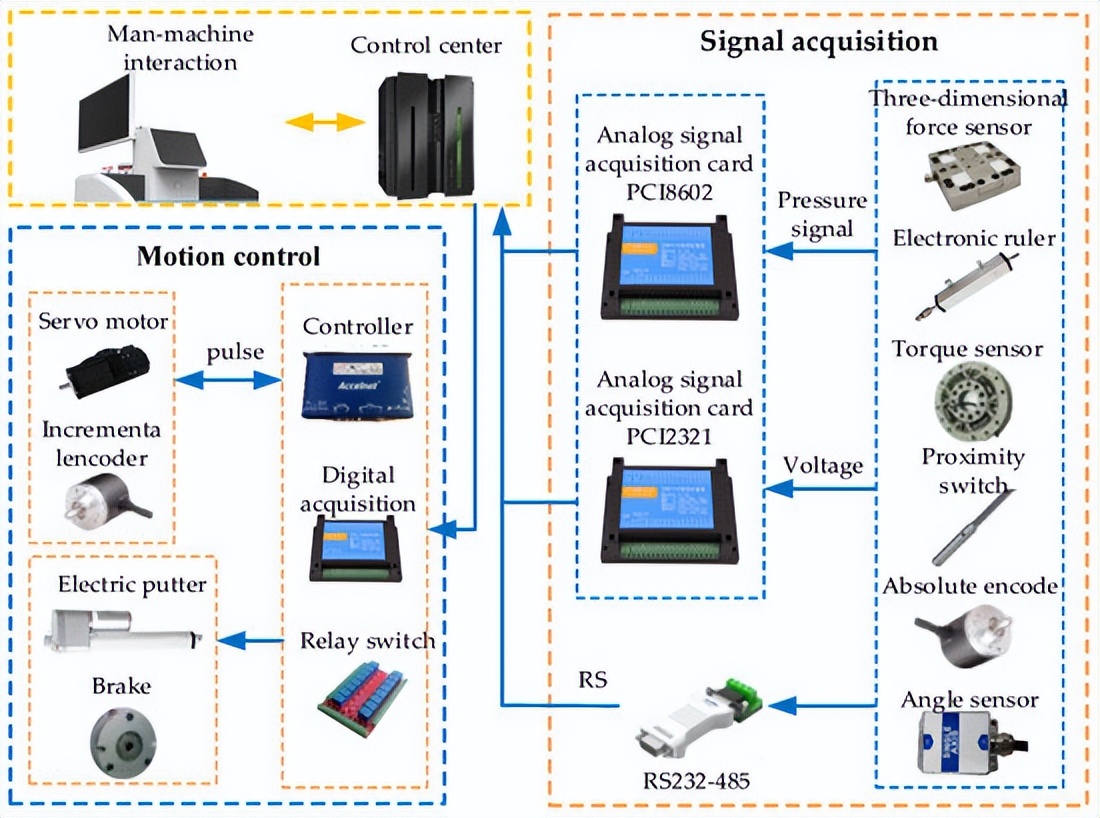
图8.控制系统的硬件关系框图。
当患者进行康复训练时,控制中心通过USB/CAN通讯模块盒、驱动器、数字采集卡、继电器等方式发出控制信号,分别控制伺服电机和电动推杆的运动,从而实现下肢康复机器人各关节的运动。
在患者的康复运动过程中,通过三维力传感器、电子尺、扭矩传感器和角度传感器等实时监测康复机器人关节的旋转角度、扭矩等参数。

图9.连杆坐标系。
③
●○轨迹规划与控制策略○●
在固定升降机构和机械腿长调节装置后,S-LLRR可以简化为三自由度串行机构,坐标系以髋关节为原点建立。
研究的主流康复运动是运动范围康复训练、基于连续被动运动的线性康复训练和MOTOmed康复训练。

图 10.康复机器人CPM末端的轨迹。
由于CPM康复训练不仅可以提供髋关节、膝关节和踝关节的联动康复运动,而且运动轨迹相对稳定,是目前下肢康复训练中最被接受的康复运动模式。
CPM的终点轨迹是脚踝轴在工作空间中保持直线运动,踝轴从初始位置 B 通过1通过中间位置 B 到结束位置 B2,膝盖位置从初始位置 A 通过1通过中间位置 A 到结束位置 A2.

图 11.CPM主要康复运动模拟曲线。(a)髋关节模拟曲线。(b)膝关节的模拟曲线。
构建了主动训练沙模型的控制框图,下垂量根据患者力 F 计算得出一个在砂模型中,然后下垂量L一个分解为x轴和y轴两个方向,进行位置反解,得到机械腿关节θ的所需位置q。
患者参加主动训练的程度与康复效果密切相关,疲劳程度是其积极参加训练意愿的直接表现。

图 12.主动控制策略的砂模型。
主要流程是将前期采集的表面肌电图、皮肤电活动、心电图、呼吸频率等生理信息数据纳入训练集,经过预处理后导入SVM分类模型进行样本训练,并根据疲劳评价定量指标得到的真实值对参数进行标定。
为了简化预测模型的学习难度,提高学习效率,从sEMG信号、心电信号、EDA信号和RESP信号中提取相应的特征,使提取的特征能够清楚地反映志愿者在训练过程中信号数据的波动。

图 13.康复机器人主动控制策略框图.
当疲劳发生时,sEMG信号的积分肌电特征表示肌肉在一定时间参与时运动单位放电的总量,反映了肌肉在一段时间内的肌电图活动强度。
RMS特性是表面肌电图的振幅,随着疲劳的加深,表面肌电信号的幅度会增加,通过计算N-N区间的标准差和相邻N-N区间之间差值的均方根差,在时域中分析ECG信号。

图 14.积极参与评估模型。
分析了EDA信号的梯度水平皮肤电导水平变化,并从该信号、SCLPD和其他特征中提取了SCLMean、标准差和极距离。
对于RESP信号,从信号中提取呼吸RESPMean和RESPSTD等特征。本文中使用的一些生理信号特征的计算方法如表2所示。

表 2.生理信号特性计算公式。
④
●○系统验证和性能分析○●
为了评估S-LLRR的运动学性能,分析康复机器人在坐姿和躺姿下的边界工作空间,然后与人体下肢的长度和运动范围进行比较,以确定S-LLRR的工作空间是否符合人体康复训练的要求。
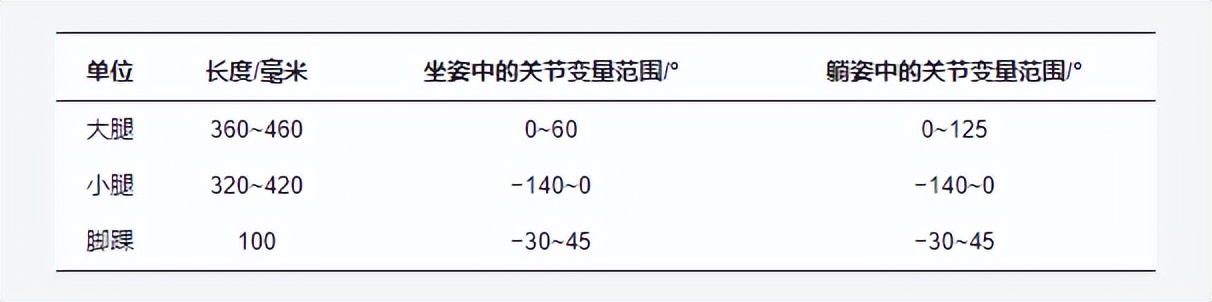
表 3.人类下肢运动的参数。
S-LLRR机械腿模型的创建和参数的定义在第3节中完成,使用蒙特卡罗方法获得机器人和患者的工作空间。
图中蓝色部分为机械腿最长的杆工作区,黄色部分为机械腿最短的杆工作区,红色为患者的可及空间,表示红色区域整体包裹,可以满足患者的训练需求。

图 15.患者和机器人工作空间。(a) 坐姿工作空间。(b) 躺卧位置的工作空间。
为了评估S-LLRR的操纵性能,使用GTS激光跟踪仪进行了末端轨迹跟踪实验,以评估其末端轨迹的准确性。
使用4名健康志愿者进行实验,CPM 康复训练 轨道 是 根据 LabVIEW 平台 设定 的,志愿者进行线性被动康复练习,行程为17 mm。

图 16.S-LLRR原型。
在人体矢状面上建立坐标系,以端部运动行程为横轴,以高度变化为纵轴,蓝色连续线表示理论结束轨迹,而橙色、蓝色和红色虚线表示三名志愿者在康复锻炼期间的结束轨迹。
由于机械腿的加工精度不足,当一个人上车时,由于重力作用,最终运动轨迹大多低于理论轨迹,中途由于抬膝动作带动下肢向上移动,末端运动的轨迹多高于理论轨迹。

图 17.末端轨迹跟踪实验。
起点和终点附近的姿态由于惯性和扭矩而波动很大,因此轨迹曲线的起点和终点并不完全巧合。总体而言,末端轨迹实验在可接受的范围内波动,证明原型运行相对较好。
为验证积极参与度评价模型的有效性,19名健康志愿者分别进行了35组不同腿部重量和不同频率的CPM训练动作。

表 4.三名志愿者的身体参数。
硬件部分包含电极片式肌电信号采集传感器、心电信号采集传感器、指端皮肤电信号采集传感器、腰带呼吸采集传感器、信号传输基站,软件部分包含ErgoLAB信号显示和后处理上位机等。
采集前,用75%酒精擦拭相应的大腿股四头肌、耳垂、脚趾、腹部区域,去除表面油脂,降低接触阻抗,然后将无线模块佩戴在志愿者采集信号的相应位置。

图 18.末端轨迹跟踪的实验数据分析.
实验过程中,要求每位健康志愿者坐在采集装置前,根据屏幕上的提示执行体重2~8公斤的CPM训练任务,要求每分钟分别完成2~10次重复,每项训练任务进行20分钟。
在训练任务结束时,要求每位志愿者完成一份问卷,以确定自己参加训练任务后的主观身体疲劳程度,疲劳分数从1提高到10。
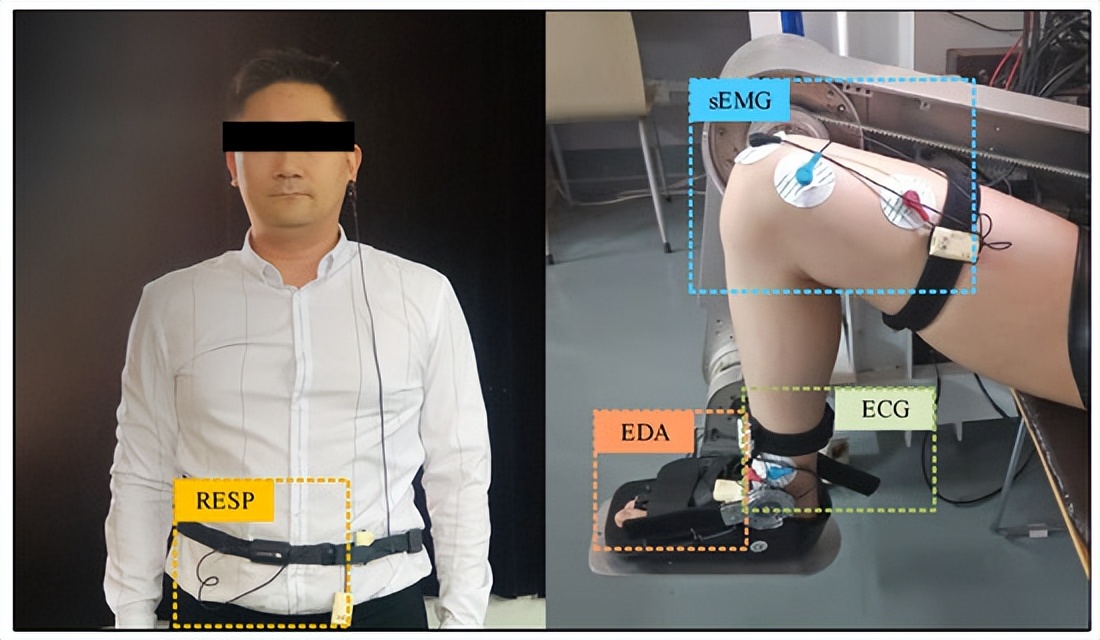
图 19.生理信号采集传感器及其位置。
再次选择10名志愿者进行两组随机难度任务的训练,培训结束后进行问卷调查,生成20组训练数据的特征数量作为预测样本输入 X 。
对10名志愿者进行问卷调查,以任务训练难度评估作为预测样本 Y 的真实输出值,主动参与度评价模型由训练数据 X 训练s和 Ys,并按照模型建立积极参与度评价。

表 5.采集通道的实验配置。
X 用作训练模型的输入,获得预测输出 Yp.分析了预测样本数据的实际值和预测值,如图20所示。基于 10 点的疲劳评估分为三种状态:“疲劳”、“中度”和“放松”。
观察每组不同颜色之差的绝对值是否在0.25以内,超过此值被视为偏差,反之则正确,3组数据中有20组的真实值偏离预测值,检验准确率达到85%。

图 20.任务难度预测的预测值和实际值的比较。
在实验中,人体生理信号采集的准确性与贴片灵敏度和粘贴位置的偏差有关,也与实验过程中志愿者的情绪波动、精神状态、实验室温度有关。
从数据中可以得到志愿者康复训练难度的评价,下肢康复机器人积极参与程度的评价模型准确率较高。

结构简单、运动方便的新型单腿下肢康复机器人,可以适应患者不同的车高和下肢长度,并用于不同的康复阶段,特别适用于早期患者不方便移动时的下肢康复需求。
积极参与评价模型只能用于培训计划的制定,考虑将人体生理信息与控制方法相结合,以更好地实现人机交互。

参考文献:
奥里希,古特,拉布鲁耶尔,R.Lokomat:FreeD模块促进了健康人的生理运动模式 。2019
阿克多安,马萨诸塞州阿德利:用于下肢康复的治疗性运动机器人的设计和控制。 2011
尹炳,胡安,李琪,魏旭,杨华,王斌:复合下肢振动训练康复机器人。 2021
王轩:基于气动人工肌肉的软并联机器人手腕康复设计与测试。2021
王国英,尹,杨海斌,唐晓强:刚柔混合下肢康复机器人人机运动规划。 2018

如果你喜欢我的写的文章,麻烦请点个“关注”,欢迎在评论区与我一同探讨,愿世界和平。
END