全球唯一 一款针对步行困难患者而研制的爱来奇无动力步行辅助器正式引进中国,半价发售啦!
当今现状
近年来,随着科技和医疗技术的快速发展“卧床不起”病人的数量不断减少,但是“坐着”的病人却越来越多了,因此步行辅助的重要性正在不断提高。我国中风(脑梗塞,脑出血)的患者人数已经超千万,而且每年新增众人数多达200万。大部分中风患者后遗症都是严重的肢体偏瘫(瘫痪)的除此之外,还有脊髓病变和损伤,膝盖关节疾病和淋巴瘤等疾病引起步行困难的人数也不可忽视。在这样的背景下,人们都把目光投向机器人领域的步行辅助和康复上应用。在本研究中我们提出了一种基于“被动步行”理论研制的无需动力源的步行辅助器。
被动步行原理
最早由加拿大Tad McGeer博士发表。简单来说就是揭示人步行并不是主要靠肌肉的力量来完成走路(抬腿和摆腿等),而是主要靠自然环境的力量(重力)。这就相当于将人大腿髋部与膝盖看作为一个两重钟摆振子,借助于重力使得人类可以以低能量高效的方式行走。假如在一个有一点点斜度的坡道上,无动力双足机器人可以利用本身所处的位置(重力)能源,实现高效率无休止的运动。日本通过10几年的研究,研制出一款最新型无动力双足机器人,并打破无动力双足机器人行走时间最长世界记录(连续步行27小时总长72km)。由此更加巩固了被动行走在全世界各种行走理论的地位,且激发了一大批研究者涌入此领域。可以说,人类走路的方式是主动行走和被动行走的最完美的结合,从而实现低能耗高效率。

在传统思维和绝大多数人认为人步行全部都是靠着肌肉的收缩(所有过程包括摆腿,屈膝和支腿),然而如果真的是这种方式人类应该是走几步就会累的气喘吁吁根本不可能实现如今这么高效的双足步行。“被动步行”原理正是研究人员发现的隐藏内在其中的机理,它阐明人类步行不仅仅是靠着肌肉的作用(主动性),更需要外界的力量迫使(被动性),这个力量就是重力。要实现标准高效步行这两者必须相互作用,缺一不可。我们可以将每走一步当成是一次摔跤,这样连续且稳定的跌倒便是步行(里面存在非常复杂的动力学)。
被动步行机器人简介
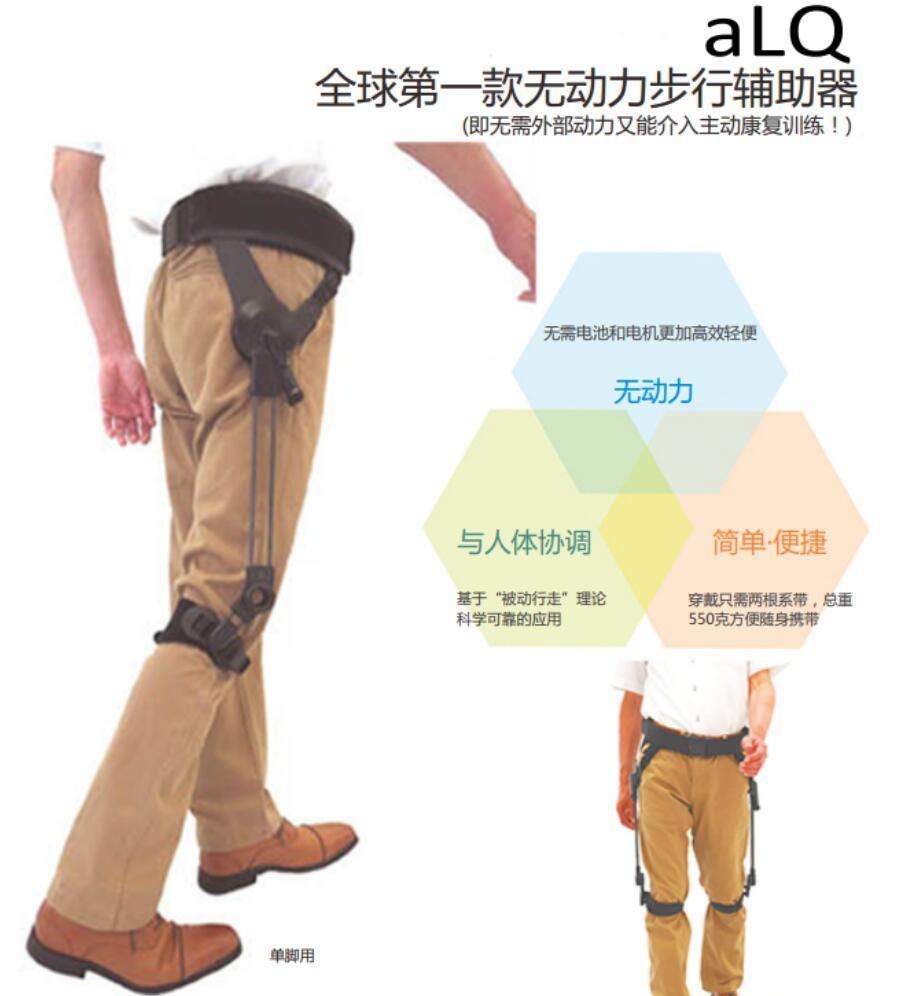
基于“被动步行”研制的机器人可以不使用电机(动力装置)和传感器,同时可以不需要控制的进行步行运动。 在被动步态中,机器人自由腿上的膝盖自然弯曲,摆出的腿只需靠重力作用就能完成。 而且,机器人的腿的轨迹不是事先确定的,机器人接触到斜坡时通过两者相互作用产生步行动作,这种步行方式是最接近人类步行的,也是最高能量效率的方式。
成人型被动步行机通过增加人员的辅助,可以在平地轻松地将活动范围从斜坡扩展到生活空间。 如图所示,装备有人体被动脚部机构和外部的被动步行机器人显示出非常接近人体的步态。
视频加载中...
科学的进步给我们最好回馈就是提高我们的生活品质和减少某些痛苦,世界上总有那么一些人一生投入与与科学巨人的博弈中,并一次次取得突破。日本研究所十五年心血研究走路,终于取得实质性突破,全面,系统化的掌握了人类步行的内在机理。科学研究成果如果不用于真实生活中的应用那也只是一些虚无缥缈的文字,此次突破不仅仅是停留在理论研究层面,更重要的是开发出来了实际的产品。
爱来奇(aLQ)与现在市面上的辅助器的区别
1、目前国内市面上存在名义上的“步行辅助器”都是非常老旧和低端的东西比如四脚助行仪,拐杖等。这类产品严格意义来说能算做一个支撑工具,完全对步行辅助起不到实际作用。所以市面上与爱来奇(aLQ)这种轻便穿戴式主动介入的康复器械几乎是不存在的。相信全新的爱来奇(aLQ)会重新唤醒中国康复器械的市场,并形成一个全新的格局!

2、随着科技的发展,世界上也研制出很多电动的步行辅助器(主要有日本CYBERDYNE,本田的助行器, 以色列的Rewalk等),这类辅助器给普通大众的感觉就是很高端,很科学。非常多的患者潜意识都倾向于选择电动的步行辅助器,他们认为电动的辅助器更加有效。然而事实并不是如此,至少目前及以后很长一段时间内不是。

活动地址
详细请见文章开头。