四旋翼飞行器研究与发展
合肥极酷科技有限公司
摘要随着现代控制技术的发展,四旋翼飞行器的应用受到广泛关注。本文分析了四旋翼飞行器的工作原理,以及介绍了现今四旋翼飞行器的关键发展技术,同时探讨了四旋翼飞行器的未来发展方向。本文对于青少年学习航模知识,了解航模的工作原理具有积极意义。
关键词:现代控制工作原理关键技术发展方向
1引言
四旋翼飞行器具有可垂直升降、稳定、成本低、结构简单等特点。它可应用于战场侦查、低空探测、空中送货、探索未知环境等生活、工业、军事各个领域。因此四旋翼飞行器的研究是近年来的热点。
斯坦福大学和宾夕法尼亚大学对四旋翼飞行器的做了深入的研究并成功商用。国内的大疆科技作为全球领先的民用航拍领域的科技公司,推出了一系列的优秀四旋翼飞行器产品。今年来汪峰无人机送钻戒事件、日本首相官邸屋顶发现的小型无人机事件、闯入美国白宫的无人机事件以及叙政府军截获无人机事件表明无人机已经离我们的生活越来越近。
本文从四旋翼飞行器的原理、系统构造来探讨无人机的发展方向以及未来前景。
1 四旋翼飞行器动力学方程
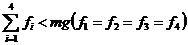
四旋翼飞行器在空间上共有六个自由度(X、Y、Z轴的平移和旋转),通过调节四个电机的不同转速可以实现对这六个自由度的控制。四旋翼飞行器是通过四个电机的驱动力来实现这六个自由度的变化,所以它是一种欠驱动系统,如图1所示。
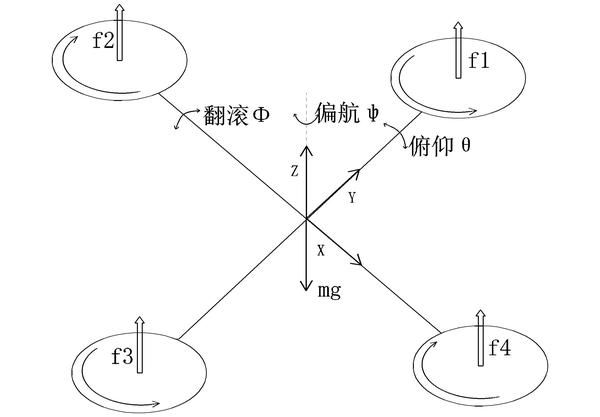
图1 四旋翼飞行器飞行原理
每个旋翼的空气动力学拉力fi(i=1,2,3,4)的数学表达式可以表示为:

(1)
式(1)中:ρ为空气密度,CT为拉力系数,Ai为第i个旋翼桨盘面积,ωi为第i个旋翼电机旋转速度,Ri为第i个旋翼桨叶片长。
因在四旋翼飞行器的设计中,四旋翼采用相同的电机与相同材质及相同大小的桨叶片,可近似把Ai、CT、Ri看作一常量,则式(1)可简化为:

(2)
式(2)中:kfly>0为依赖于空气密度的常数,ωi为第i个电机旋转角速度。
在地球惯性坐标系RW=(Ex,Ey,Ez)与机载坐标系ξ=(x,y,z)下,以电机M1方向为前方,M1与M3为逆时钟方向旋转,M2与M4为顺时钟方向旋转;Ψ为飞行器偏航角,φ为飞行器滚动角,θ为飞行器俯仰角。
在图中f1、f2、f3、f4分别为四旋翼旋转产生的向上拉力矢量,τi(i=1,2,3,4)为第i个电机为克服电机转轴叶片拉力与加速度而产生的反作用力矩,mg为飞行器合重力矢量,L是从电机轴到四旋翼飞行器重心轴的垂直距离,则四旋翼飞行器总合力矢量u、偏航力矩τΨ、滚动力矩τφ和俯仰力矩τθ分别为:
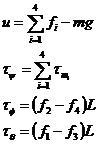
(3)
四轴飞行器六个自由度对应着六个基本运动状态,它们分别是:(1)垂直运动——Z轴方向的竖直运动;(2)横滚运动——绕X轴的旋转运动;(3)俯仰运动——绕Y轴的旋转运动;(4)侧向运动——沿Y轴的水平运动;(5)前后运动——沿X轴的水平运动;(6)偏航运动——绕Z轴的旋转运动;
下面根据公式对四旋翼飞行器飞行状态及原理图分别进行阐述:
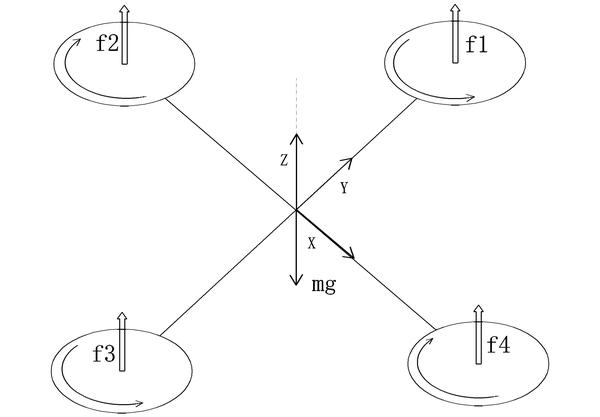
图2 (a) 垂直运动
(1) 垂直运动:垂直运动是其中最简单的运动。如图2(a)所示:
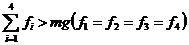
(4)
当四轴飞行器受到向上的拉力大于其所受重力时,它将向上运动如式4所示。所以对应电机的变化情况就是四个电机的转速增加,这四个旋翼转速增加后四轴飞行器便开始垂直向上的运动;
(5)
相反,若要让四轴飞行器向下运动则要相应地减小四个电机的转速,如式5所示。这样便实现了飞行器沿Z轴(竖直方向)的运动。
(6)
如果没有外界的干扰,四轴飞行器在悬停状态时它的升力会等于它的自身所受重力,如式6所示。
只有当四个电机同步加速或同步减速才能稳定地完成这些操作。
图2 (b) 横滚运动

(7)
(2)横滚运动:如图2(b)所示,改变电机1与电机3的转速,保持电机2和电机4转速不变,此时四旋翼飞行器的机身将围绕X轴旋转,完成四轴飞行器的横滚运动,如式7所示。另外为了不因四轴整体总拉力及扭矩随旋翼转速的改变而引起变化,旋翼1和旋翼3转速改变量的大小应相等。

(8)
(3)俯仰运动:原理同横滚运动,改变电机2和电机4的转速,保持电机1和电机3的转速不变,此时四旋翼飞行器的机身将围绕Y轴旋转,完成四旋翼飞行器的俯仰运动,如式8所示。另外为了不因四轴整体总拉力及扭矩随旋翼转速的改变而引起变化,旋翼2和旋翼4转速改变量的大小应相等。
(4)侧向运动:事实上侧向运动是在横滚运动的基础上完成的,先完成横滚运动,后保持此状态不变,旋翼的拉力便在Y轴上产生水平分量,这样我们就实现了四轴飞行器的向左或向右的侧向运动。
(5)前后运动:其实前后运动与侧向运动原理是一样的,因为四轴飞行器的电机安装也结构都是对称的。
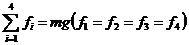
图2 (c) 偏航运动

(9)
(6)偏航运动:如图2(c)所示,当1、3电机转速同时增加,其逆时针合转矩增加;2、4电机转速同时减小,其顺时针合转矩减小,由于总的转矩出现不平衡,故四轴开始左旋;反之,四轴右旋,如式9所示。
因此四旋翼飞行器在三轴坐标系上的六个运动状态可由四个电机的旋转角速度决定。而电机的旋转速度由给定驱动板上的PWM信号决定。
2 四旋翼飞行器的关键硬件组成
整个系统的硬件框架包括控制模块,驱动模块,供电模块,GPS模块,姿态检测模块,无线通讯模块。系统的简单工作流程为:无线通讯模块接收来自遥控的控制信号,将控制信息传给主控芯片。姿态检测模块实时监测飞行器飞行姿态,然后主控芯片对姿态传感器内的数据进行实时读取,将读取的数据与程序内设定值比较,再调用各种复杂的算法(如PID控制、模糊控制、数据融合等),从而获取四旋翼飞行器的姿态数据,计算出控制量,转化为相应的PWM信号,最终信号经电机驱动板驱动四个电机工作,使四旋翼飞行器能够稳定飞行,在这过程中也可以接收来自遥控器的指令信号,从而进行相应动作。其系统框图如图2所示:
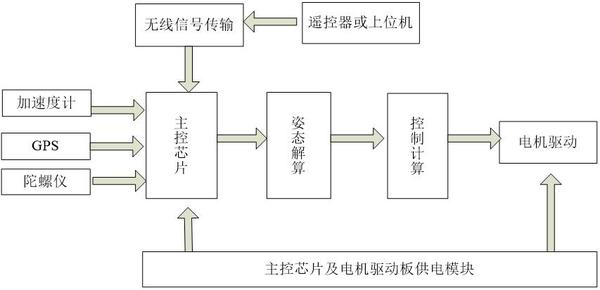
图3四旋翼飞行器系统框图
2.1 姿态检测模块
飞行器飞行的稳定与否直接与姿态检测的精度密切相关。加速度计和陀螺仪可以用来对飞行器的姿态进行检测。目前的MPU6050是一款集成了3轴陀螺仪和3轴加速度计的运动处理芯片,因为加速度计与陀螺仪集成在一块芯片内,这样便很好地免除了加速度计与陀螺仪的轴间差问题。
加速度计的工作原理:首先由传感器内的敏感元件将检测而来的加速度信号转换为相应的电信号,然后通过模拟放大电路使微弱的电信号放大,由信号调理电路对信号进行处理,最后通过AD转换得到姿态数字信号,这些数据就是传感器内的原始数据,主控芯片利用这些数据实时计算飞行器的飞行姿态。加速度传感器的作用是感知机身相对于水平面的倾斜角度,运动中的物体的加速度由两部分组成:重力加速度和其它力产生的运动加速度。
陀螺仪的工作原理:建立三维坐标系,并且用几何的知识来引入角度,进行数学分析,来得到陀螺仪数据的过程,每一个轴向的陀螺测量该轴的旋转。我们建立如图4所示的坐标系并在坐标系中进行分析:
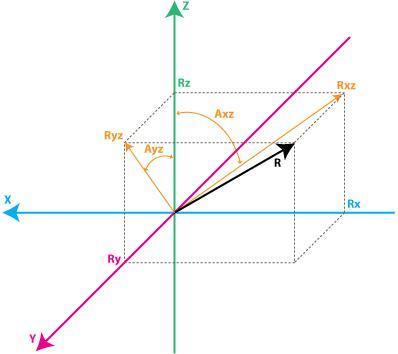
图4 在三维坐标系下分析角度
在建立的坐标系中,RXZ是向量R在XZ平面的投影,RYZ是向量R在YZ平面的投影。在上图中根据勾股定理可得:

(10)

(11)
接下来我们将用定义角度来表示Z轴和RXZ,RYZ向量:
AXZ表示Z轴和RXZ之间的夹角,AYZ表示 Z轴和RYZ之间的夹角。经过上述定义,我们开始对陀螺仪测量角度有了一个更为直观的了解。陀螺仪测量的是角速度的变化率,换言之即陀螺仪输出的是一个和角速度变化的线性相关的值。为了更清晰的理解,我们以绕Y轴的旋转为例来描述这个问题。在T0(S)时刻开始,假设当前角度值为AXZ0度;到T1(S)时刻,角度为AXZ1度。角度的变化率可以用下列公式表示:

(12)
其中ΔXZ单位为deg/s;
根据陀螺仪输出的角度的变化率,对其积分可得出物体转过的角度。但陀螺仪存在温漂,会影响测量精度,因此利用加速度计测量数据和陀螺仪测量数据互补,才能很好地测量和输出飞行器的速度,方位。
2.2 电机驱动模块
四旋翼飞行器往往采用高速无霍尔传感器无刷直流电机,因此必须使用良好的电机驱动板(俗称电调)电机才会正常工作。而由于电机无霍尔传感器,因此转子位置信号的检测显得尤为重要。现今较为成熟的方案是电机反电动势过零点检测法。
假设在某一个阶段,电机A相和B相导通,C相此时不导通,则
对A相绕组有:
(13)
对B相绕组有:
(14)
两式相加得到

(15)
由于无刷直流电机的三相对称关系有

(16)
得到

(17)
因此,在无刷直流电机相电流处于续流状态时,

(18)
由公式可知,当相电流处于续流状态时,C相的端电压和反电动势成正比的关系,因此,我们可以用这时候的端电压的值与固定电压进行比较可以精确得到C相的反电动势的过零点,在延迟30电角度,可以得到无刷直流电机的换相点。
图5为电机反电动势和相电流与电角度之间的关系。图6为反电动势过零点检测电路。
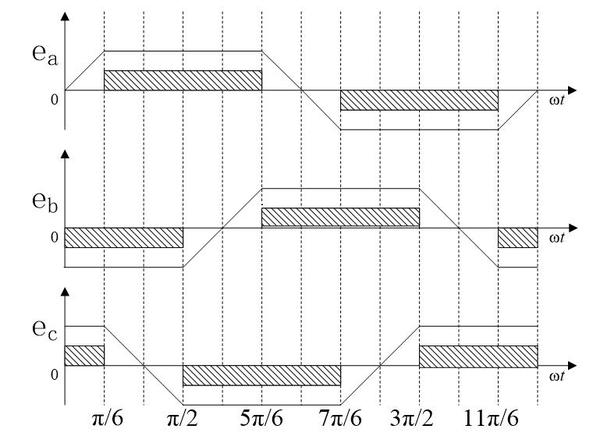
图5 反电动势和相电流与电角度的关系
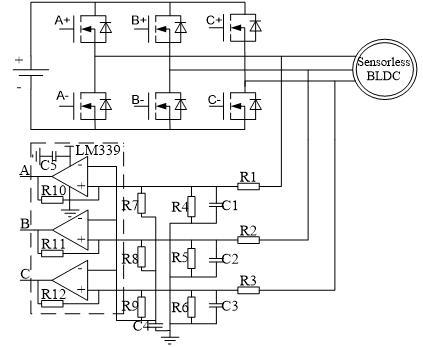
图6 过零点检测电路
由于电机M1和M3为逆时针旋转,M2和M4顺时针旋转,因为电压空间矢量的选择顺序为相反。
对于无刷直流电机来说,每个桥臂上的开关状态不同,因此可以得到相隔60电角度的六个非零电压矢量U1(100001)、U2(001001)、U3(011000)、U4(010010)、U5(000110)、U6(100100)和一个零电压矢量U7(000000)。如图7所示为定子的空间电压矢量。
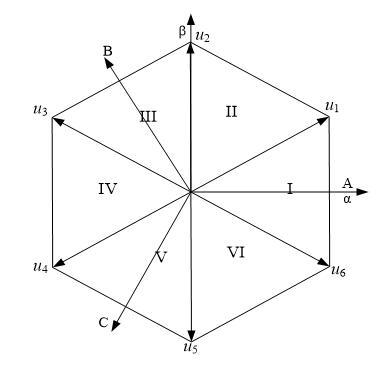
图7 定子的空间电压矢量
针对电机旋转方向的不同,电压空间矢量的选择顺序也不一样,表1为无刷直流电机的电压空间矢量表。
表1 电压空间矢量表
| CAP1 | CAP2 | CAP3 | 逆时针 | 顺时针 |
| 1 | 0 | 1 | U1(100001) | U6(100100) |
| 1 | 0 | 0 | U2(001001) | U5(000110) |
| 1 | 1 | 0 | U3(011000) | U4(010010) |
| 0 | 1 | 0 | U4(010010) | U3(011000) |
| 0 | 1 | 1 | U5(000110) | U2(001001) |
| 0 | 0 | 1 | U6(100100) | U1(100001) |
3 未来发展与展望
四旋翼飞行器的研究有很多方面的意义,无论在国防、民用及商用领域,四旋翼飞行器都显示出了其独特的研究价值。但由于一些技术的不成熟,使它的发展受到了限制。若能在如下方面进行相应的改进与提升,其应用价值将会得到进一步的提升。
1、轻量化结构设计,重力降低,为了保持飞行器悬停所需要的升力减小,相应的转速减小,功耗更低。
2、采用比能量比较高的高性能电池作为续航电池,提升续航时间。
3、控制系统更加智能化,适应更多复杂环境的工作要求。
4、提升飞行器的安全性,当飞行器失控时,尽量自我修复,若修复不了,尽量减轻对人的伤害。
5、针对特殊场合的特殊性,比如敌方截获我军的一架无人机,数据应立即销毁。
四旋翼飞行器虽已发展多年,但还有很多性能提升的空间。随着近年来设备的越来越智能化,四旋翼飞行器的应用领域将会越来越广。
参考文献
[1]程学功. 四轴飞行器设计与研究[D].杭州电子科技大学,2012.
[2]陈金辉,潘佳笛,王伟. 四旋翼无人机速度控制系统设计[J]. 计算机测量与控制[J], 2015.23(6):1940-1943.
[3]王伟,王昱,夏曼. 微小型四旋翼无人飞行器姿态控制[J]. 2014,31(12): 59-63.
[4]中国经济网. 感“悟”世界之美京东首发大疆航拍器 Inspire 1 [EB/OL].(2015—01—12).
文章来源:合肥极酷科技有限公司 大疆无人机体验店 18326605812
