在阅读此文之前,麻烦您点击一下“ 关注 ”,既方便您进行讨论和分享,又能给您带来更多的参与感,感谢您的支持


文/观文史说
编辑/观文史说
01
现代内窥镜技术的演进与应用领域
人类的身体是一个神秘而复杂的系统,对于医学科学家和医生们而言,深入了解身体内部并及时发现异常是至关重要的,而内窥镜技术的出现,则为医学诊断和治疗带来了革命性的变化。
在过去的几十年里,内窥镜技术经历了飞速的发展,从最初的简单工具逐渐演进成为高度复杂而多样化的现代内窥镜系统。
内窥镜最初是一种简单的观察器械,用于检查人体内部的组织和器官,早期的内窥镜通常是光学放大镜和灯光的简单组合,用于检查消化道和呼吸道等腔道结构。
随着科技的不断进步,内窥镜技术得到了飞速的发展,现代内窥镜已经实现了数字化和图像传输的革命,不仅可以实时观察,还可以录制和存储高清晰度的影像,为医生们提供了更为全面和准确的信息。
现代内窥镜技术的演进还包括了器械和探头的创新,随着微电子技术的发展,现代内窥镜的探头变得越来越小巧,可以更容易地进入狭小的腔道和器官。
内窥镜的探头不仅可以观察,还可以进行病理检查和治疗,例如,内窥镜可以配备活组织采集钳,通过探头的导引,在患者体内采集组织样本进行病理学检查,内窥镜还可以搭载激光切割和高频电凝等治疗器械,进行内窥镜下的治疗操作。
内窥镜技术的演进也扩展了其应用领域,最初只用于检查消化道和呼吸道等腔道结构,现代内窥镜技术已经应用于多个医学领域。
在消化道领域,内窥镜可以检查胃肠道的疾病,例如胃溃疡、胃癌、结肠息肉等,在呼吸道领域,内窥镜可以观察气管和支气管的疾病,如肺癌、支气管炎等。
在泌尿道领域,内窥镜可以检查膀胱、尿道和肾脏等器官,发现泌尿系统的异常,此外,内窥镜技术还应用于妇科、神经、心脏等领域,为医学诊断和治疗提供了强有力的支持。
除了医学诊断和治疗领域,内窥镜技术还被应用于科学研究和教育,在科学研究中,内窥镜技术可以用于观察细胞和组织的变化,研究疾病的发病机制和治疗效果。
在医学教育中,内窥镜技术为医学学生提供了直观而生动的教学材料,帮助他们更好地了解人体结构和疾病特点。
虽然现代内窥镜技术已经取得了巨大的进步,但仍面临着一些挑战,例如,内窥镜的探头依然较为粗大,有时无法进入狭小的腔道和器官。
内窥镜技术的操作需要高度熟练的医生,否则可能对患者造成损伤,未来的内窥镜技术需要不断改进和创新,以进一步提高其精确性和安全性。
现代内窥镜技术的演进和应用领域是医学领域中的重要里程碑,它不仅带来了医学诊断和治疗的革命性变化,还推动了医学研究和教育的进步。
02
柔性仿生机器人的基本原理与特点

人类历来梦想着创造能够模仿生物体的机器人,使它们更加适应复杂多变的环境,并在特定任务中表现出卓越的性能。
柔性仿生机器人应运而生,它是通过对生物体结构与运动原理进行仿生设计,开发出灵活、柔软、适应性强的机器人,柔性仿生机器人不仅拥有与生物体相似的外形,更在机器人学领域带来了重大突破。
柔性仿生机器人的基本原理是通过仿生学(Bionics)的理论和方法,模仿生物体的形态、结构和运动原理,实现机器人的设计和制造。
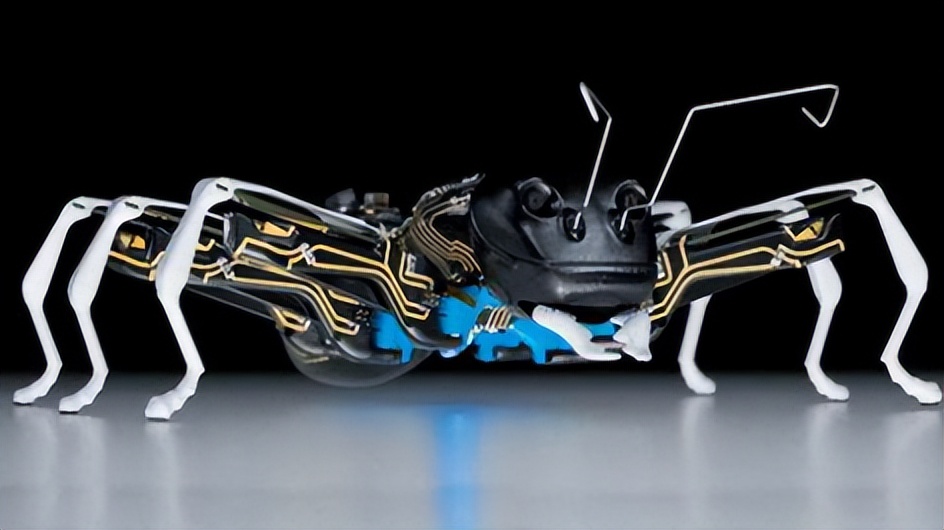
仿生学是一门跨学科的科学,将生物学、机械工程、电子学、材料学等多个学科融合在一起,在柔性仿生机器人的研究中,科学家们深入研究生物体的特点,如鱼类的游泳、蛇类的爬行、昆虫的飞行等,将其运动原理与材料特性与机器人的设计和制造相结合。
这种深入研究生物体的模仿方式,使得柔性仿生机器人能够在不同环境中表现出更高效的运动和适应性。
柔性仿生机器人的特点在于其柔软、灵活和适应性强,传统的机器人多采用硬质材料,导致它们在复杂环境中难以灵活运动,且容易受到碰撞损坏。
而柔性仿生机器人采用柔软材料和柔性结构,使得它们能够像生物体一样弯曲、蜷缩、伸展,适应复杂多变的环境。
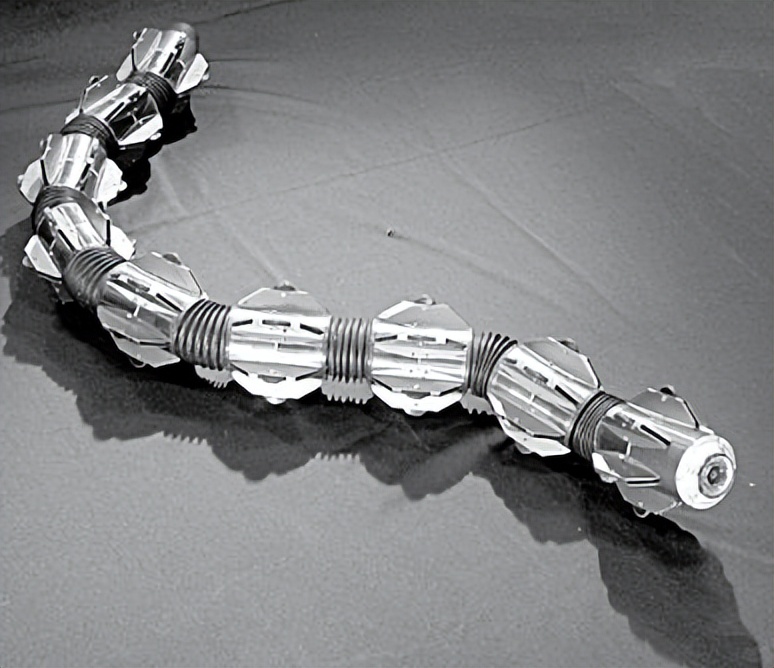
一些蛇形的柔性仿生机器人可以在狭窄的空间中穿行,模仿蛇类的爬行能力,这种柔性特性使得柔性仿生机器人在救援、勘测、医疗等领域展现出更大的应用潜力。
除了柔软和灵活,柔性仿生机器人还具有高度的适应性和自适应能力,生物体在面对复杂环境时,能够根据外界条件调整自身的运动和行为,以适应环境。

柔性仿生机器人通过对生物体的运动原理和神经控制系统进行仿真,实现了在特定环境中的智能自适应,这种适应性使得柔性仿生机器人在实际应用中表现出更高的效率和稳定性。
它还具有较强的生物相容性和安全性,传统机器人往往采用金属或塑料等材料,与人体接触时易产生摩擦和刺激,导致安全隐患,而柔性仿生机器人采用柔软材料和生物相容性较好的材料,可以更安全地与人体接触,使其在医疗领域有更广泛的应用前景。
柔性仿生机器人的发展还受益于纳米技术和智能化技术的进步,纳米技术可以制造出高度灵活的纳米材料,为柔性仿生机器人提供更多选择;智能化技术可以赋予机器人更高级的感知和决策能力,使其在复杂环境中更加智能化和自主化。
随着科技的不断进步,柔性仿生机器人的应用领域也在不断拓展,目前,柔性仿生机器人已广泛应用于医疗、救援、勘测、环保等多个领域。
在医疗领域,柔性仿生机器人可以用于内窥镜检查、手术操作、康复辅助等,为医生和患者带来更多便利和安全,在救援领域,柔性仿生机器人可以用于搜救被困者、勘测危险地带,提高救援效率和安全性。
在勘测领域,柔性仿生机器人可以用于勘探油气资源、矿产资源,降低勘测成本和风险,在环保领域,柔性仿生机器人可以用于监测环境污染、清理海洋垃圾,保护生态环境和野生动植物。
柔性仿生机器人是一项富有挑战和前景的科技创新,它通过对生物体的模仿和应用,为机器人技术开辟了新的领域,柔性仿生机器人的柔软、灵活和适应性,使其在医学、救援、勘测、环保等领域具有广泛的应用前景。
03
柔性仿生机器人在医学领域中的应用概述

医学领域一直是科技创新的重要应用领域之一,而柔性仿生机器人的出现为医学诊断、治疗和手术带来了新的可能性,柔性仿生机器人是通过模仿生物体的形态、结构和运动原理,采用柔软材料和灵活结构设计的机器人。
它们在医学领域中的应用,为医生提供了更高效、更精准、更安全的诊疗手段,推动了医学科技的不断进步。
柔性仿生机器人在内窥镜检查与手术中发挥着重要作用,传统内窥镜由于硬性结构,难以进入复杂的腔道和器官,容易造成创伤。
而柔性仿生机器人采用柔软材料和灵活结构,可以像蛇类一样弯曲、伸展,轻松穿越狭小通道,通过内窥镜检查,医生可以实时观察患者的内部结构,发现病变并及时采取治疗措施。
柔性仿生机器人还可以搭载手术器械,通过内窥镜手术完成一些微创手术,减少患者的疼痛和创伤。
在脑神经外科手术中,医生需要对脑部进行高精度的操作,而柔性仿生机器人可以在手术中提供高清晰度的影像,并通过智能化技术辅助医生进行定位和切除,使手术更加精准和安全。
在眼科手术中,柔性仿生机器人可以帮助医生进行视网膜手术,精确植入眼内镜片,恢复患者的视力。
在康复训练中,柔性仿生机器人可以模仿人体的运动方式,帮助患者进行康复训练,恢复运动功能,在脊髓损伤康复中,柔性仿生机器人可以帮助患者进行肢体训练,恢复部分行动能力。
柔性仿生机器人在生物激活和组织修复方面也具有广阔的应用前景,柔性仿生机器人可以用于植入微型生物传感器,实时监测患者的生理状态,为精准诊疗提供数据支持。
这种机器人还可以用于植入生物组织支架,促进组织修复和再生,为患者带来更好的治疗效果。
他们在医学教育和培训中也扮演着重要角色,传统医学教育主要依靠解剖学模型和实物模拟训练,而柔性仿生机器人可以提供更为真实的模拟训练环境,帮助医学生更好地了解人体结构和手术操作技巧。
医学研究和实验,柔性仿生机器人在医学研究和实验中也有着广泛的应用,在药物筛选和毒性测试中,柔性仿生机器人可以用于模拟生物体对药物和毒物的反应,为药物研发和毒性评估提供数据支持。
柔性仿生机器人在医学领域中的应用具有广泛的前景和重要的意义,它们的柔软、灵活和智能化特点使其在医学诊疗、手术辅助、康复辅助、生物激活和医学教育等方面发挥着重要作用。
04
柔性仿生机器人在内窥镜手术中的可操控性问题
随着科技的不断发展,柔性仿生机器人在医学领域中的应用日益广泛,特别是在内窥镜手术中,柔性仿生机器人展现出了独特的优势,如能够灵活进入复杂腔道、减少手术创伤等。
随之而来的挑战是如何确保柔性仿生机器人在手术中的可操控性,即医生能够精准地控制机器人的运动,实现精准的手术操作。
柔性仿生机器人的可操控性是内窥镜手术的关键,内窥镜手术是通过内窥镜进入患者体内进行手术,相比传统开放手术具有更小的创伤和更短的恢复期。
而柔性仿生机器人由于其柔软的结构,可以更容易地进入狭小的腔道和器官,实现更精准的手术,然而,由于柔性仿生机器人在手术中的运动需要由外部控制,如何确保医生能够准确、实时地控制机器人的运动成为一个重要问题。
为了解决柔性仿生机器人在内窥镜手术中的可操控性问题,目前有几种常见的解决方案,首先是通过智能化技术提高机器人的自主性。
智能化技术可以使机器人根据患者的生理状况和手术需求,自动调整运动轨迹和力度,机器人可以通过内置传感器实时感知患者的生理参数,根据患者的呼吸和心跳节律调整运动节奏,保持稳定的运动状态。
这种智能化技术可以减轻医生的操控负担,提高手术的安全性和精确性。
采用先进的操控设备和交互界面,提高医生对机器人的操控效率和准确性,在柔性仿生机器人的设计中,可以加入高精度的传感器和执行器,实现更灵敏的运动控制。

可以开发出直观、易用的交互界面,让医生能够直接观察机器人的运动状态,通过简单的手势或指令实现运动控制,这种交互界面可以实现实时互动,使医生能够更快速地对机器人进行操控和调整,提高手术的效率和精确度。
机器人的自主学习能力也是提高可操控性的一个重要方面,柔性仿生机器人可以通过机器学习算法,从大量的手术数据中学习并优化运动规律。
可以通过监督学习的方法,让机器人从已有的手术数据中学习运动轨迹和力度,形成更优化的运动策略。
机器人还可以通过增强学习的方法,通过与环境的交互不断优化运动控制策略,这种自主学习能力可以使机器人在手术中逐渐适应不同患者的个体差异和手术需求,提高手术的适应性和精确性。
围绕可操控性问题,还需要加强对机器人的安全性和可靠性的研究,内窥镜手术是一种高度复杂的操作,要确保机器人在手术过程中不会发生故障或失控,避免对患者造成损伤。
需要对柔性仿生机器人的结构和材料进行严格测试和评估,确保其在手术中的安全性和可靠性,还需要建立完善的故障检测和纠正机制,及时发现和修复机器人的故障,保障手术的顺利进行。