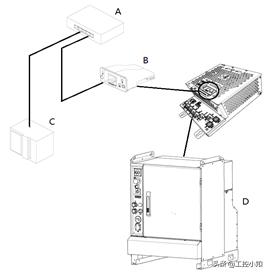
除了通过ABB机器人提供的标准IO板进行与外围设备进行通讯,ABB机器人还可以使用DSQC688模块通过Profinet与PLC进行快捷和大数据量的通讯。
ABB机器人侧Profinet配置的操作步骤如下:
1.单击左上角主菜单按钮。

2.选择“控制面板”。

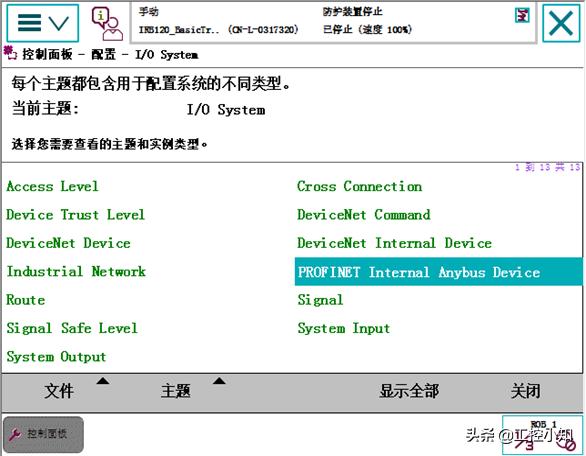
3.选择“配置”。

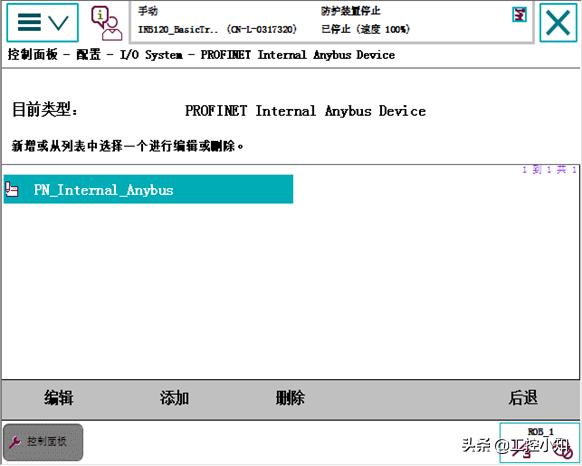
4.双击“PROFINET Internal Anybus Device”。
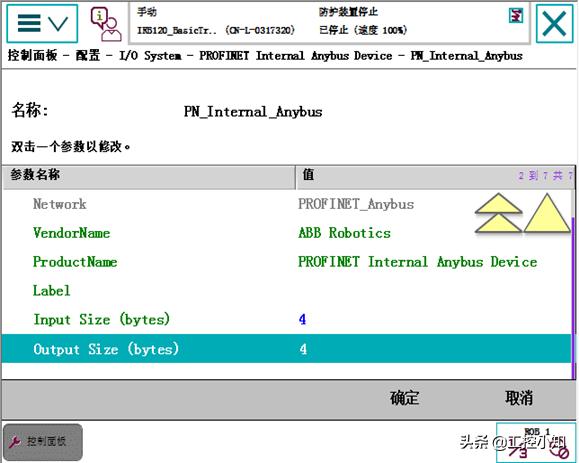
5.双击“PN_Internal_Anybus”。
6.将“Input Size(bytes)”和“Output Size(bytes)”设定为“4”。这样,该Profibus通讯支持32个数字输入信号和32个数字输出信号。
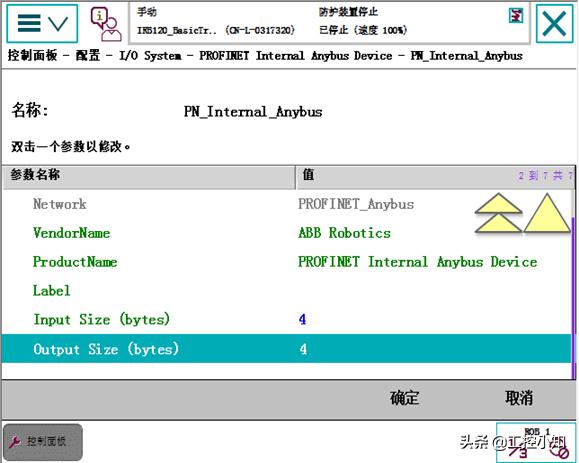
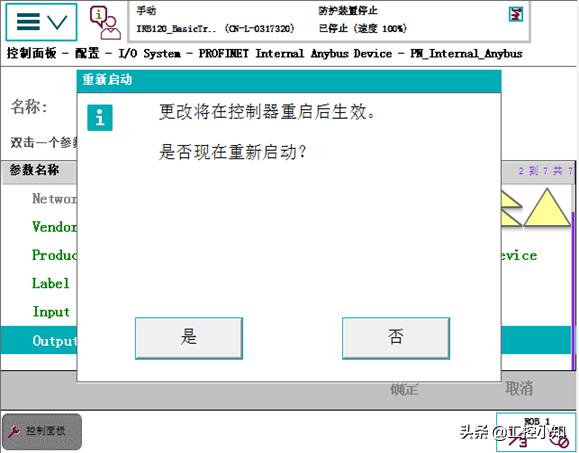
7.单击”确定”。
8.单击”是”。
9.基于Profibus设定信号的方法和ABB标准I/O板上设定信号的方法基本一样。
要注意的区别就是在“Assigned to Device”中选择“PN_Internal_Anybus”。

在完成了ABB机器人上的Profinet适配器的设定后,也需要在PLC端完成相应的操作:
a将ABB机器人的DSQC688配置文件安装到PLC组态软件中。
b.编辑节点,分配IP地址和设备名称给扫描出来的机器人控制器上的Profinet适配器接口。
c.在组态软件中将新添加的“DSQC688”加入到工作站中并设置该机器人站点的IP地址及设备名称(与上一步分配的IP地址、设备名称保持一致)。
d.添加输入输出模块(这里添加总数各4字节的输入输出模块)。
e. ABB机器人中设置的信号与PLC端设置的信号是一一对应的(低位对低位)。