西门子 1200PLC 通过 Anybus(DeviceNet Master — Profinet IO Slave AB7647-F) 模块和 ABB 机器人 DeviceNet 主从通信, Anybus 模块做 DeviceNet 主站, 五台 ABB 机器人做 DeviceNet 从站。 1200PLC 做Anybus 模块的 Profinet IO 主站。1、 硬件接线;

图 1 接线图
2、 分配Anybus模块IP地址和名称,根据设备情况;

图 2 分配IP地址和名称
3、 博途软件组态Anybus模块,需要先安装Anybus模块GSD文件;

图 3 Anybus模块GSD文件

图 4 博途软件安装GSD文件
4、 网络视图下,组态Anybus模块;

图 5 配置Anybus模块
5、 根据实际通信数据的多少,选择通信输入/输出的长度。这里选择Input/Output 64bytes;

图 6 设置通信数据长度及地址
6、 更改机器人D652模块的DeviceNet地址,多个ABB机器人连接到一个DeviceNet网络下,各模块
DeviceNet地址要唯一。D652模块上有短接条,调整短接条的引脚,可以修改模块地址。机器人中D652的地址要与实际硬件一致;

图 7 DeviceNet地址修改

图 8 D652地址
7、 修改ABB机器人DeviceNet通讯地址,地址唯一(2-6),默认为2;

图 9 机器人DeviceNet通信地址
8、 机器人通讯数据长度与 Anybus 模块设置的数据长度一致。所有 ABB 机器人的通信数据长度的和,不大于PLC组态时分配的数据长度;

图 10 ABB机器人DeviceNet通信数据长度
9、 添加机器人通信使用的变量,从0位开始,长度不能超过设置的通讯数据长度(10个字节,0-79 位),可以根据需要随意组合多少位;

图 11 添加通信变量
10、 Anybus模块配置。打开Anybus Configuration Manager - X-gateway软件,选择Upper和Lower
端的协议类型。分配PROFINet IO端的通讯数据长度,与PLC组态中一致。如图 7和图 8。利用USB线缆连接模块面板右下角的USB接口至电脑USB接口,*载下**配置;

图 12 Anybus模块DeviceNet Scanner/Master配置

图 13 Anybus模块Profinet IO(Lower)配置

图 14 *载下**
11、 打开 Anybus NetTool for DeviceNet 软件,安装 ABB 机器人的 EDS 文件。计算机需要安装 RobotStudio或者从其它已安装RobotStudio的电脑中复制EDS文件;

图 15 安装ABB机器人EDS文件
12、 Ctrl+A全部选择,点击“打开”;

图16 全部选择

图17 GSD文件安装完成
13、 创建新连接;

图18 建立通信连接
14、 通讯建立,所有的从站会显示在界面中。2-6是机器人DeviceNet通信地址,10/11/14/26/42 D652 DeviceNet地址。双击1号Anybus M-DEV;

图 19 显示所有在线的从站设备
15、 Parameter选项,Master state改为ldle模式,点击Single download使模式设置有效;
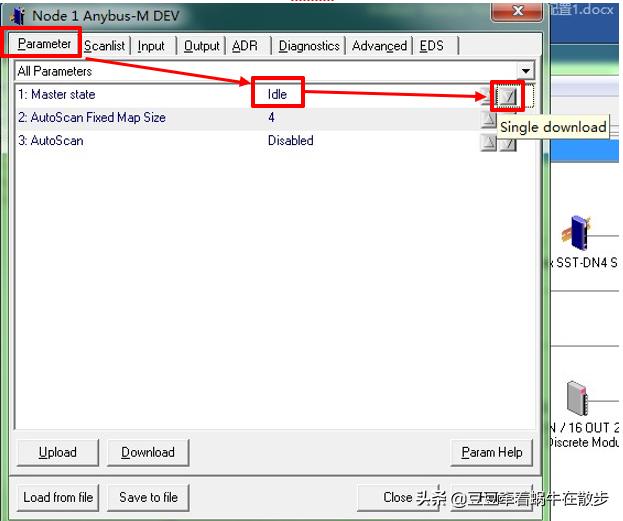
图20 模式更改为ldle模式
16、 Scanlist 选项,选中所有的机器人从站,点击 Add,修改通讯数据长度,与机器人中配置的
DeviceNet通讯数据长度一致,点击OK;

图21 添加从站设备,设置通信长度
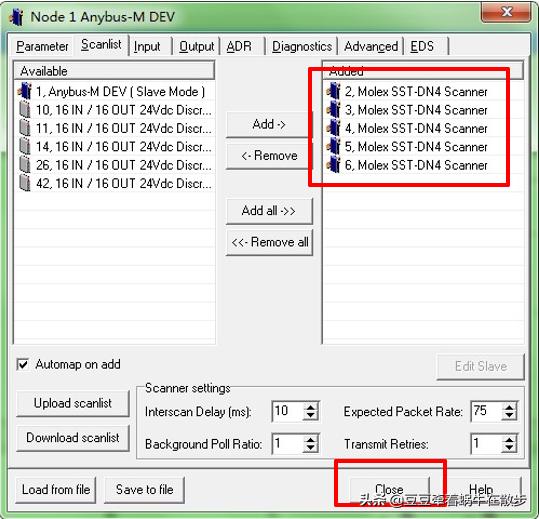
图 22 添加从站完成
17、 *载下**,等待完成;

图 23 *载下**
18、 修改Master state 为Run模式,点击Single download使模式设置有效;

图 24 改为Run模式
19、 测试通信数据;
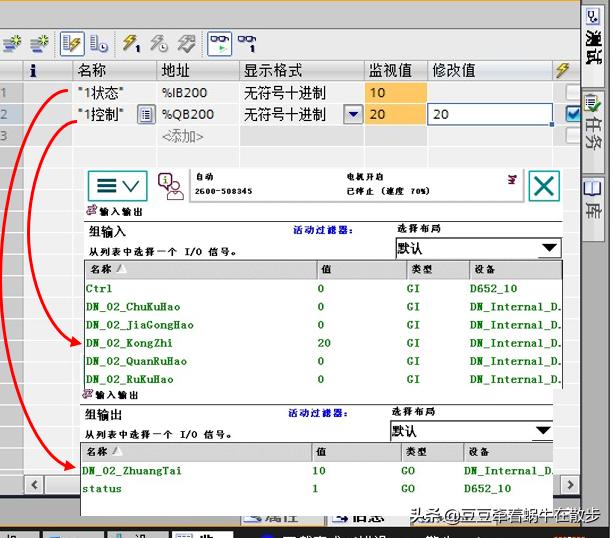
图 25 通信数据监控
本文由 @豆豆牵着蜗牛在散步 原创,欢迎关注,带你一起长知识!