据媒体最新报道,北斗地图APP预计将于5月1日正式上线。北斗地图APP是一款基于北斗卫星精准导航服务的基础位置服务工具,可为用户提供移动、实时的定位、导航,以及基于位置的衣食住行、商家信息服务。北斗地图目前可以做到1米之内,精确到具体某个车道。未来有望精确到厘米级。
在智能汽车领域,精准地图是非常重要的基础设施,那么今天为大家详解一下精准地图的室内外一体化定位技术。
文/郑勇
本文主要回答四个问题:
1. “地图”二字所指的东西,在悄悄变化,怎样变化?
2. 如何区分定位和导航?
3. 室内外定位的区别是什么?
4. 精准地图对室内外定位来说,意味着什么?
如果你读此文时,感觉太过浅显和平淡,请保持足够的耐心,我们的故事是这样的,平淡,平淡,平淡.......然后忽然之间,又平淡的结束。平淡的叫科技,热闹的叫某某某。
先说几个最最基本的小概念:
地图

地图的定义,可以去问百度,在剔除首页的一大堆广告之后,保不齐能有你的答案。
我不讲定义,只讲变化。
二十年前,我们把印刷的地图叫做“地图”,随后把一种能在PC和导航仪上打开的产品叫“电子地图”。后来我们不再说“电子地图”,只说地图。而再提以前那种印刷的地图时,我们通常称之为“纸质地图”。如今,纸质地图,在我看来,最大的作用似乎是挂在墙上或摆在书架上做装饰品。
后来,我们有了一个产品,叫“导航地图”,可惜最早那家叫“灵图”的公司已经淡出人们视线。
再后来,某家公司宣布导航地图免费,我们逐渐没了“导航地图”,只有“地图”,因为所有的地图都可以导航了。
所以未来无论出现什么“XX地图”,不要急,可能很快,它就会变成主流“地图”,而之前的地图可能会叫做“非XX地图”。
有两件事似乎一定会发生的,一个是“三维地图”和“实景地图”,可能很快就会变成主流“地图”,而现在的地图可能会加个前缀叫做“二维地图”和“非实景地图”。
另一个是“自动驾驶地图”,一样的,很快会变为“地图”,如今的产品,就成了“非自动驾驶地图”或是“老的地图”。
什么是自动驾驶地图?地图本身拥有活力,可以和自动驾驶的车辆互动,自动驾驶车辆上的传感器可以自动识别地图,可以仅通过地图就能实现自动的导航和定位,和传统的导航地图相比,最大的区别在于,在GNSS(全球卫星导航系统)缺失的时候,地图可以自动为车辆提供定位服务。
怎么实现?技术细节会很平淡地在后面章节中出现。
导航和定位
这两个概念经常是混淆的,比如我们经常讲的室内定位,更多的时候,其实是室内导航。
知道GPS和GNSS的区别吗?大家都知道是单星系的名称和多星系的总称。
仔细看一下定义,很有趣。GPS(Global Positioning System)全球定位系统,GNSS(Global Navigation Satellite System)全球卫星导航系统。一个叫定位系统,一个叫导航系统。
其实二者工作上并无区别,只不过,GPS出现的比较早,最早期的GPS(知道多普勒的冒个泡),定位并不是实时的,所以只能定位,不能导航,我们的北斗一代也类似。而实时定位是导航的基础。
定位就是确定某一点的位置(坐标)(X,Y,Z),而导航是依靠实时定位,实现从A地到B地的引导。
上边内容基本属于废话,如果你读的很有趣,说明,你是一个......很有趣的人。
定位/导航和地图的关系
没有地图的定位,我们获取一个多数人无法理解的坐标。
有了地图,我们可以不在关心坐标,只关心我们在图上的位置,其实这种定位在纸质地图时代我们就一直在做,你拿着地图站在十字路口来确认自己位置的过程,就是定位的过程。

没有地图的导航,是矢量导航,早期的GPS导航仪都是如此的,茫茫大漠中,给自己的营地定一个位,于是无论走到那里,都有一个方向和距离给你,告诉你要往哪里走,要走多远。
有地图的导航,就不再是简单的矢量导航,而可以进行复杂的路径规划,带路径规划和导航功能的地图,就是早期的“导航地图”,现在的主流地图。
导航和定位是什么

就是一种能实时确认在地图上的位置,并依靠这种实时定位达到目的地的技术手段。又是一段废话,但是,废话往往是真理,如果我们做的事情和废话不符,那么我们做的事一定出了问题。
室内外定位的区别

这个问题大概很多人都会讲,室内没有GNSS信号。
在我看来,室内外定位在理论上完全没有区别,都是基于地图定位的问题,都是要找到一种技术手段,把自己的位置确定在地图上。
那么室内定位比室外定位更难吗?我觉得完全不是,感觉容易是因为GNSS,室内的WiFi、UWB等数十种定位手段都没有GNSS好用。
但是,如果在完全没有GNSS的情况下,室内室外哪个定位更容易?我们的WiFi、ibeacon、IMU、UWB,哪个可以解决室外的问题?我总觉得室内定位是更简单的问题,只不过,我们常常用错了方法。
室内定位的最大误区
某公号发了一篇关于室内定位技术的文章,很全面,很多人转发并收藏了,也包括我。本想引用点内容在这个帖子里,后来考虑知识产权问题作罢。
这样的知识文献还有很多,但很有趣的一件事是:我刚说定位就是位置和地图的匹配(别提矢量导航,室内矢量导航),这一类文献里很少提及室内地图(将来也只是“地图”)以及位置和地图的匹配,那么问题来了,如果你们说的精度不是基于地图,位置不和地图匹配,那么是什么精度?

还有,目前的室内地图地图精度多少?5米,请问,5米精度的地图,你如何实现高精度定位,你号称1米的定位手段有什么用?
或许我们应该反向思考,先获取高精度的室内外地图,再研究基于精准地图的室内外定位,也许我们根本不用复杂的技术手段就可以简单实现高精度定位。
谷歌的Tango智能在哪里
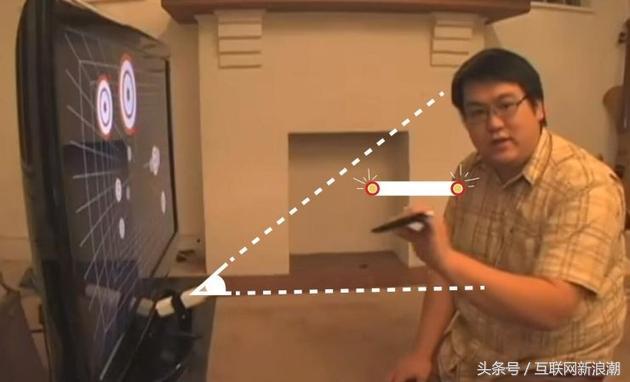
所谓的人工智能,就是让机器越来越接近人的思维方式同时拥有机器的强大计算能力。
Tango的定位或许是科技,但它完全是人类定位的模式。
前面讲过,人类定位的方式,就是用自己的眼睛,拿着地图站在街头,靠视觉所得,确认自己在地图的位置。
这种方式我们其实常用,商场里每层都有平面图,你看图的位置会有个红点写着“You are here”,这样你就能把自己的位置和地图对应起来。
Tango完全是这种方式,它用深度摄像头来代替人眼,通过视觉所得,和影像地图匹配,确认自己的位置。比人类高明的是,它的计算和存储能力,可以使它存储整体影像地图,并快速匹配。而它的精度其实不好说,因为取决于地图的精度,地图什么精度,它就什么精度。
(题外话:之前某媒体发了一篇关于影像匹配定位的文章,内容本身到没太大问题,只不过,因为本身的专业水平问题,作者把定位过程和影像地图采集过程混淆了,所以有点逻辑混乱。 )
基于精准地图的室内外无依托定位
绕来绕去,终于说到正题。其实无论室内还是室外,只要有了精准地图,再解决从地图上获取位置的手段,也就解决了定位的问题。而定位的精度依赖于地图的精度,如果精密的机器控制需要厘米级精度,很简单,你需要厘米级的精准地图。
这种技术最大优势就是无依托,我们可以不用发射单元,或者装很少发射单元辅助。这比大把安装发射单元的方式,无论效率还是成本都会大幅度提高。
和精准地图的匹配手段
谷歌毕竟只有一个,不过还好,还有它们。
除了Tango之外,还有哪些可以匹配地图的技术手段呢?
室内的匹配,我们可以分三个不同的层次:
1. 民用
这种应用主要面对大众,终端为手机,所以使用带有位置信息的二维码是最简单易行的方式。车库寻车时,地下车库其实无论头上还是地面,都有无数的标志,把这些标志换成二维码就解决了定位的问题。

那么导航如何解决?其实手机传感器有足够的导航能力,唯一问题是这些传感器普遍精度不高,精度会快速衰减,需要时时校正其漂移,如何校正?用精准地图。如何匹配?用位置二维码。完美。
2. 专业人员定位
IMU这一类无须发射端的可以自主定位的传感器最理想,这类定位需要专业定位终端,位置体现在后台服务器上,而被定位的人员无须知道自己位置。
专业IMU的精度要远好过手机,所以一旦校准后可以维持一段较长时间的定位,但一段时间后最终还是会漂移,所以同样需要定期校正,靠什么校准?同样是精准地图。
校准方式:
1)定期自动在地图上选取位置,在后台服务器上校准。
2)WiFi、ibeacon之类辅助校准。
3. 机器人精准定位
机器人有时需要在室内完成一些精准的动作,那么它需要厘米级的控制精度,这个怎么实现呢。鉴于视觉识别的局限性,这一类应用,我推荐用激光扫描。
第一, 我们需要厘米级的高精度地图。
第二, 我们需要厘米级精度的激光传感器。
第三, 激光传感器的实时扫描数据和精准地图进行匹配,道理和Tango一样,只不过激光的可靠性更高,这样就获取了厘米级定位。
室外无 依托定 位
室外的无依托主要解决GNSS缺失时候的定位,比如军事用途,比如无人驾驶等。
这个和室内机器人定位原理如出一辙,所不同的在于激光传感器的选择。
1.室内机器人一般平稳运行,只需要单线激光和二维匹配。而室外必须要三维激光传感器。
2.室内空间狭小,单线激光容易保持更纯净的数据,同时扫描距离不需要很远。而室外需要长距离的数据获取的匹配,所以需要较长距离的激光传感器。
对室外激光传感器的要求,基本和车载激光是一致的。所以对无人驾驶来说,是无须额外的硬件成本的,只需要精准的室外三维地图,和一套三维数据匹配的算法就够了。
以上所有平淡的内容就是基于精准地图的室内外无依托定位。它的核心技术其实并不在定位,而是地图,数据匹配固然是最高深的一部分,但其基础依然是高精度地图。
其实我们的地图一直在发展和进步之中,只是我们没有给地图足够的尊重和更深的理解。
前一段时间人们曾议论“GIS已死”的问题。其实,如果GIS真的死了,取代它的,一定不叫大数据,而是叫“地图”。