
文 | 咸鱼永不放盐
编辑 | 咸鱼永不放盐
«——【·前言·】——»
林业起重机在林业运营中具有至关重要的作用,因此近年来进行了大量的努力来提高其性能,可是所有这些努力全都集中在自动化技术上,却忽略了其它可以改进的地方。

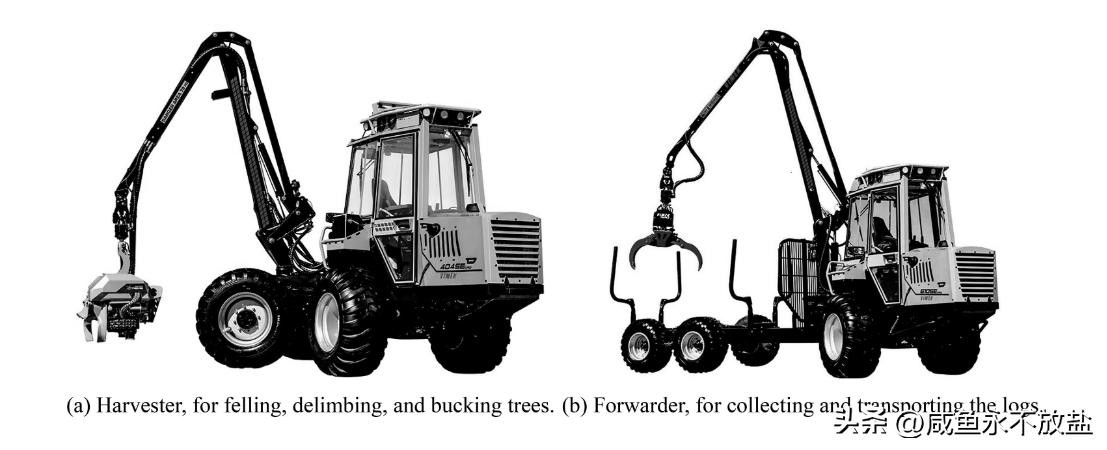
在北欧国家中,当考虑到切长方法时,林业起重机是采伐和收集木材的主要工具,这种方法通常包括两个人操作的林业起重机工作方案,一个伐木工起重机用于砍伐、剥皮和减小树木尺寸,另一个正装式马具起重机用于收集和运输木材到场地进行卸载。
«——【·林业起重机在林业运营中的重要作用·】——»
目前,林业起重机的性能和生产力在很大程度上依赖于人工操作员及其经验,以使用尽可能少的资源维持良好的工作进度。
然而由于这些机器的体积、重量和难以控制,只有最有经验的操作员才能实现高水平的生产力,这对林业起重机制造商来说确实是一个巨大的挑战,因为高技能的操作员数量非常有限。

在过去的十年中,改进林业起重机性能的大部分技术解决方案都集中于使用智能自动化软件控制起重机,这些努力已经取得了成果,可以在市场上现有的产品中看到,例如笛卡尔控制,其中人工操作员无需单独控制每个缸体,而是直接控制终端执行器的移动。这种技术使得探索其他林业起重机改进方案变得重要。
以前的林业界几乎忽视了模型基础设计这一领域,这种设计方法涉及获取描述机械系统动态行为的多域物理模型,可轻松缩放到不同类型或大小的机器上。

由于其通用性和效率,林业起重机设计已经数十年没有改变,变化的是它们的尺寸,它们变得更大更重,意味着燃油消耗和地面损坏也增加了。
基于模型的设计可以改变这种情况,并给林业带来巨大的性能和生产力方面的益处,但在提出改进的林业起重机设计之前,必须解决一些理论和技术方面的问题。

与其他类似的重型机械,例如液压挖掘机相比,模型基础设计的状况并没有太大不同,通常大多数设计和建模努力都将液压挖掘机视为具有开放式运动链的机械系统。
将液压挖掘机视为既有开放式运动链也有闭合运动链的多体系统,使用的建模方法导致了一个三阶DAE系统,这意味着更高的复杂性和计算工作量。

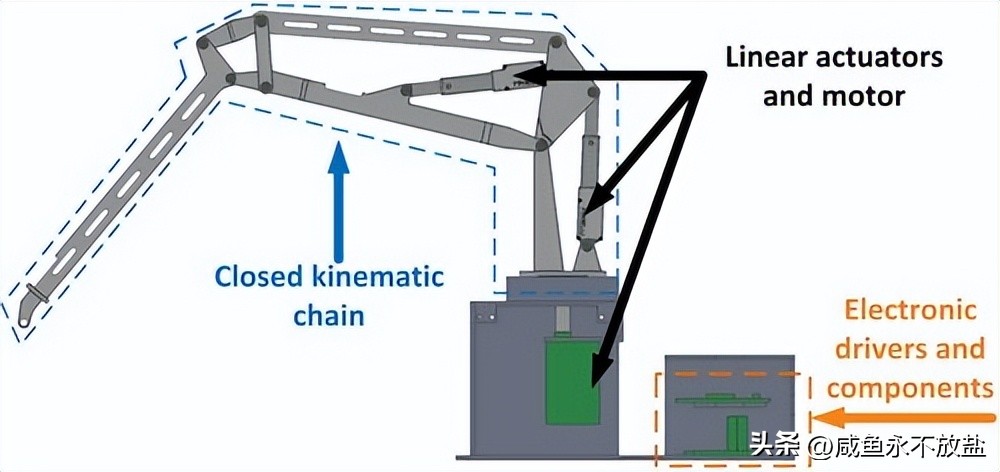
我们选取了的正装式林业起重机作为建模过程的基础设计,这是一种小型正装式林业起重机,主要用于小直径树木,不具备伸缩连接器的特征。选择该起重机作为基础模型的原因是其封闭运动链比具有伸缩连接器的起重机更为复杂。

伐木机起重机具有三个自由度,配备两个直线执行器和一个带齿轮箱的电机。对于直线执行器,我们选择了Actuonix生产的L-12-P系列微型直线执行器。两个直线执行器都具有30mm的行程长度,210:1的齿轮传动比和一个内部模拟电位计来提供位置反馈。
电位器中央端的电压将按比例在两个参考电压之间线性变化,与执行器行程的位置成正比。对于带齿轮箱的电机,我们选择了37D Polulu,该电机具有131:1的齿轮传动比,而位置反馈则由一个每转64个周期的集成编码器提供,意味着可以测量低至0.042度。
由于直线执行器和电动机均没有力、扭矩传感器,因此需要从它们的激励电流中计算出这些值,为了测量这些设备使用的电流,我们设计了一种基于低阻抗电阻器的电路。该电路连接到商业L298N电机驱动器,可以同时执行两个动作:测量执行器、电机使用的电流并启用向两个方向的激励装置运动。
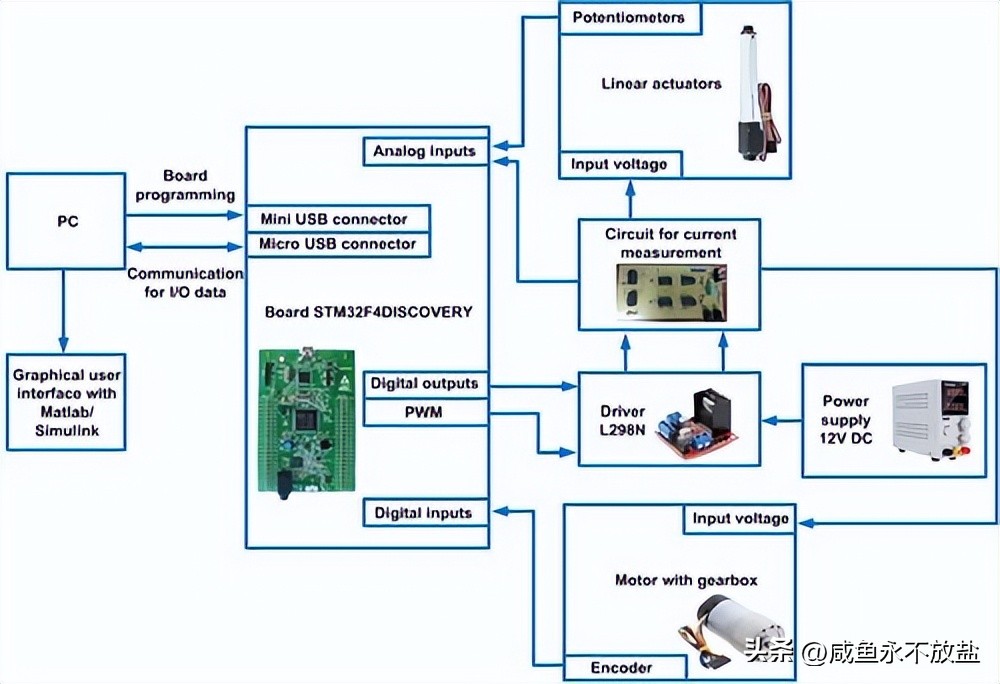
控制器和电子元件的选择符合直线执行器和电机制造商提供的操作规格。图中显示了电子组件、电路板和驱动器如何共同控制执行器的运动,而图中显示了实际实验原型的照片。

用于推导具有闭合运动链的系统动力学数学模型的程序与用于开放运动链系统的标准程序不同。
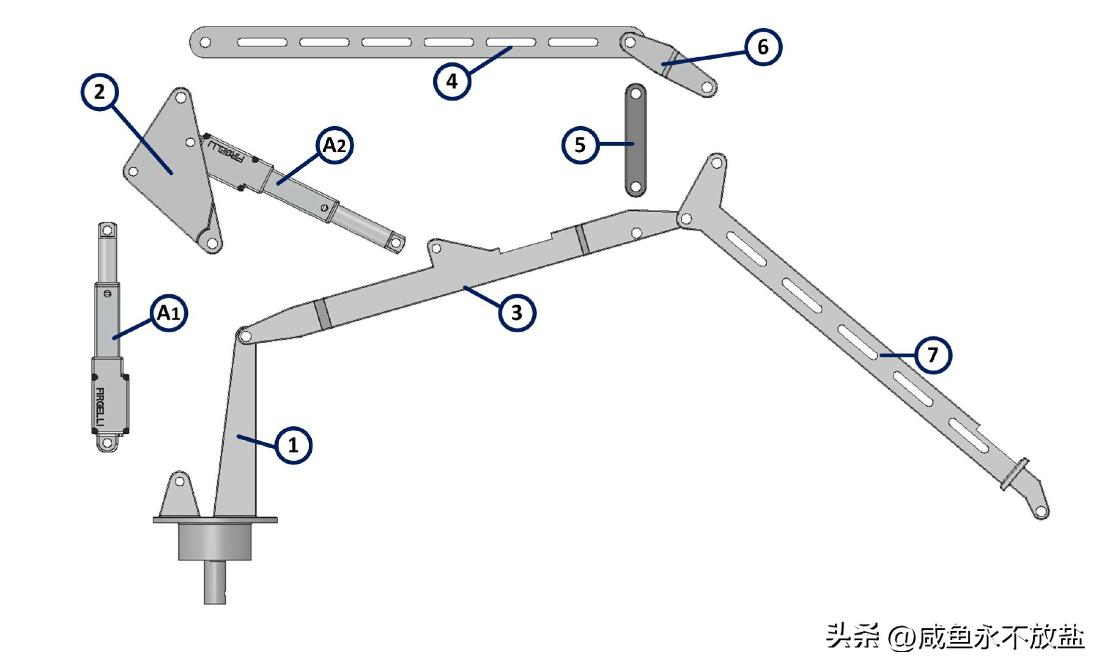
推导图中伐木机起重机的动态模型的第一步是将CKC分成多个OKC。在进行CKC的划分时,需要注意每个元素只能是一个OKC的一部分,即不允许在开链中重复使用元素。
正向运动学允许从关节变量的指定值确定系统中不同元素的位置和方向,在我们的情况下,我们希望获得组成五个OKC的所有元素的位置和方向。
虽然所有链是单独分析的,但它们必须具有相同的基准参考系X0,Y0,Z0。此外,如果需要辅助参考框架,并且这些框架先前已在其他链中建立,则新框架必须与先前的框架匹配。

获得闭合运动链的动力学模型的第一步是使用机器人建模的标准程序来获取开链系统的动力学,例如欧拉-拉格朗日公式。
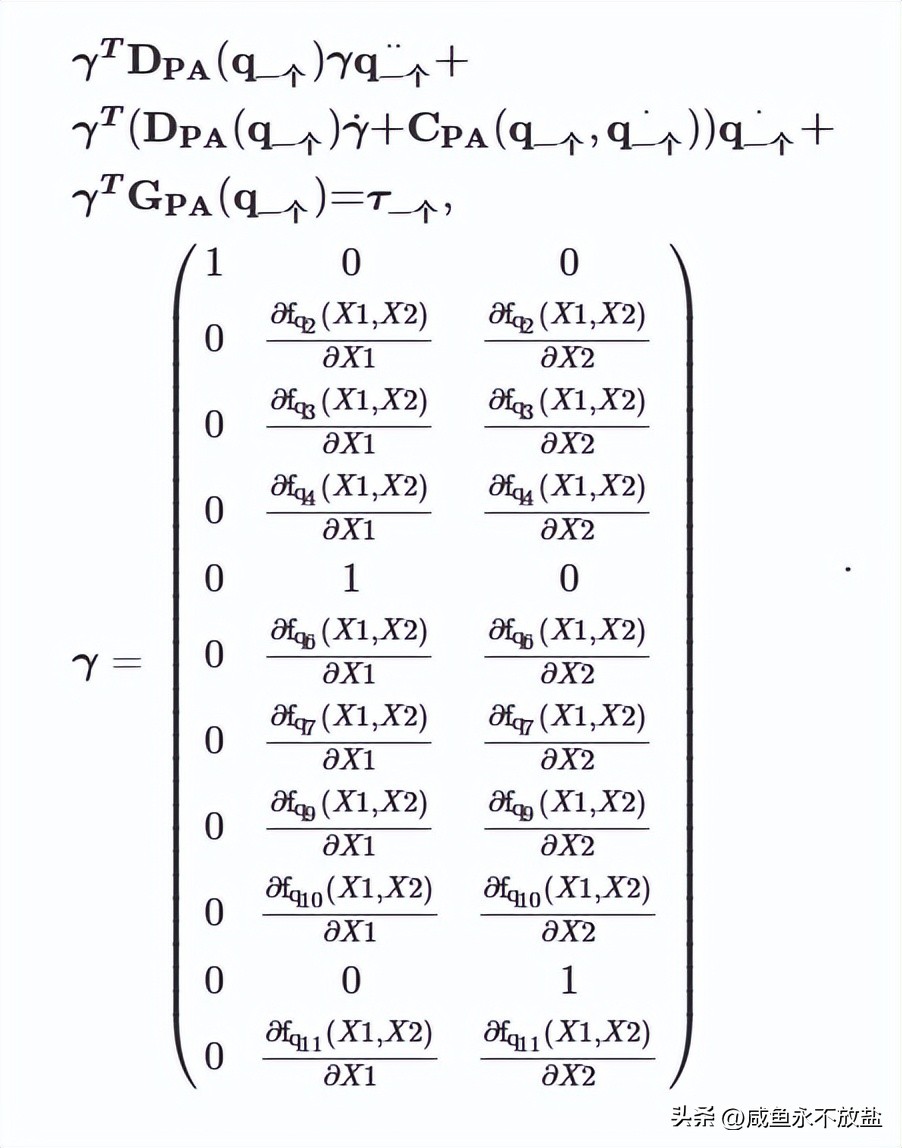
在导出每个开链系统的动力学模型之后,需要得到一个包含所有开链系统动态模型的方程,这个方程表示没有约束的动态模型,其状态由被动关节和主动关节的向量qPA确定。

一旦将动态模型陈述为qPA的函数,就需要将这样的模型转化为q一个的函数模型。为此,应存在表示运动学约束的函数,使得qPA=f(q一个)。找到联系qPA和q一个的运动学约束f的一种方法是使用三角恒等式和几何关系。
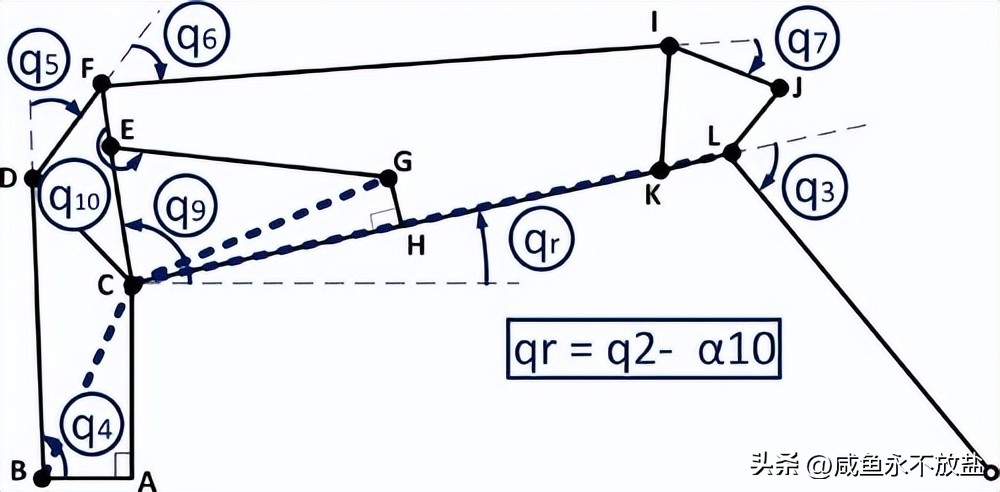
以主动关节q一个为函数,C部分显示了如何获取运动约束及其在矩阵γ中相应值的示例,示例侧重于运动约束fq4(X1,X2),但同一过程适用于所有其他约束。
一般来说,真实系统中的摩擦力与运动相反,并具有相当不对称的模式,取决于速度和运动方向。在本次研究中,将库仑摩擦和粘性摩擦结合起来。
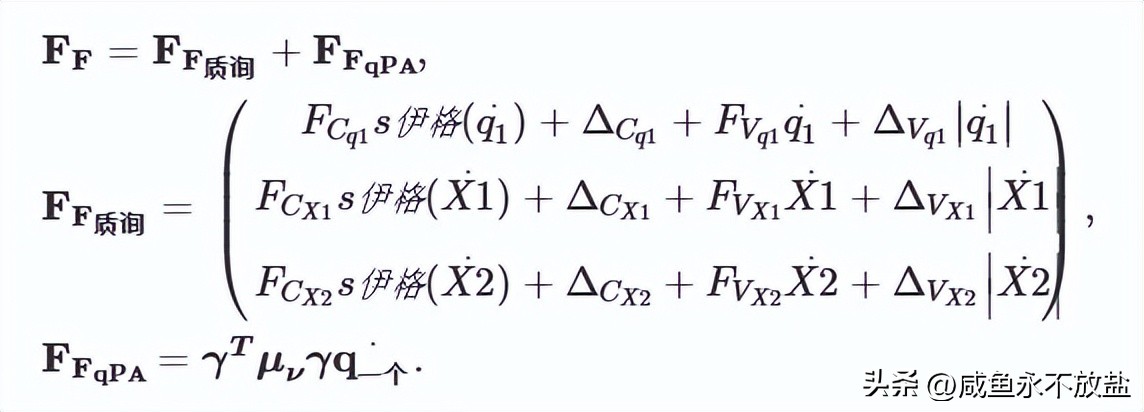
其中FF质询是执行器中的摩擦力向量,考虑了不对称的库仑摩擦和粘性摩擦,FFqPA是被动关节中的摩擦力向量,其中只考虑了粘性摩擦力。
由于齿轮箱的动态影响,只在主动关节中考虑库仑摩擦力,电机、线性执行器1和线性执行器2 的库仑摩擦平均值分别为FCq1、FCX1和FCX2,ΔCq1、ΔCX1和ΔCX2代表变化系数。
电机、线性执行器1 和线性执行器2 的粘性摩擦平均值分别为FVq1、FVX1和FVX2,ΔVq1、ΔVX1和ΔVX2代表变化系数。最后,μν 表示包含粘滞摩擦系数的对角矩阵。

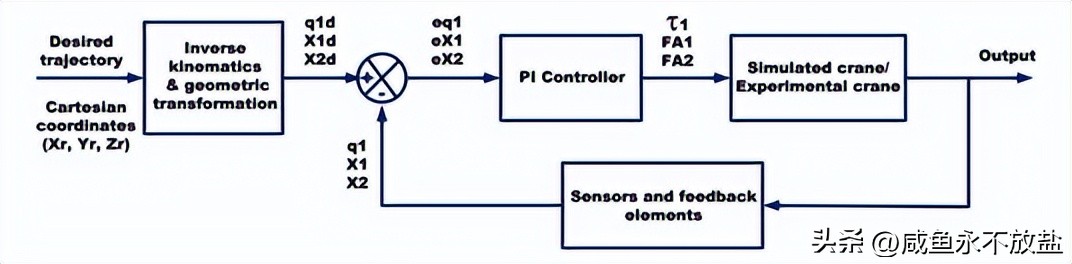
实验验证通过三个测试完成,其中末端执行器应该遵循一个参考轨迹,这些参考轨迹是以笛卡尔坐标给出的,这意味着需要进行转换到关节坐标空间。此转换通过考虑末端执行器和运动链A的逆向运动学完成。
当q1、q2和q3已知时,需要进行第二次转换,第二次变换是通过几何关系进行的,旨在推导出q1、X1和X2的期望值。由于需要确保末端执行器按照轨迹移动,并且执行器执行所需的运动,因此需要进行闭环控制。
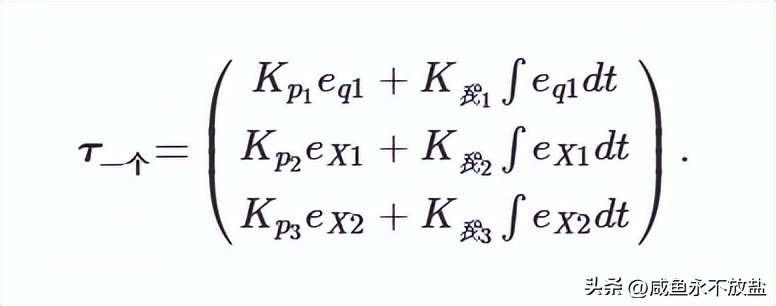
Kp1、Kp2和Kp3分别表示电机、线性执行器1和线性执行器2的比例项系数,而K我1、K我2和K我3表示积分项系数。其中q1d、X1d和X2d分别是电机、线性执行器1和线性执行器2的期望位置值。闭环控制器在仿真和实际硬件中均得到实现。
实验结果与仿真结果之间的比较指标是百分比误差,它指的是执行特定任务时实验力向量和模拟力向量之间的差异。

«——【·起重机实验的验证和结果·】——»
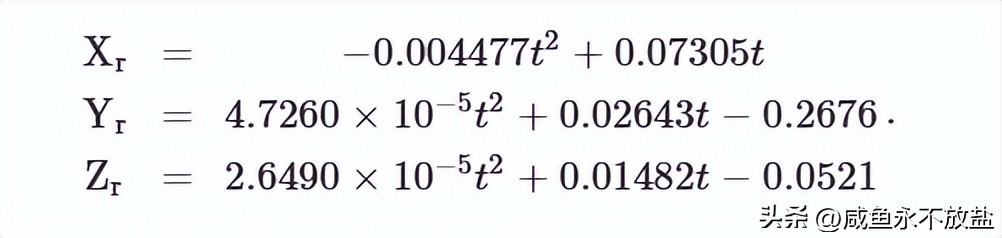
此轨迹旨在模拟前进操作中的装载任务,其中将一根原木拾起并放入原木堆,对于两种情况,即仿真和实验结果,起重机的运动均从静止开始,而该路径的参数方程式Xr、Yr和Zr的单位为米,0≤t≤10 s。
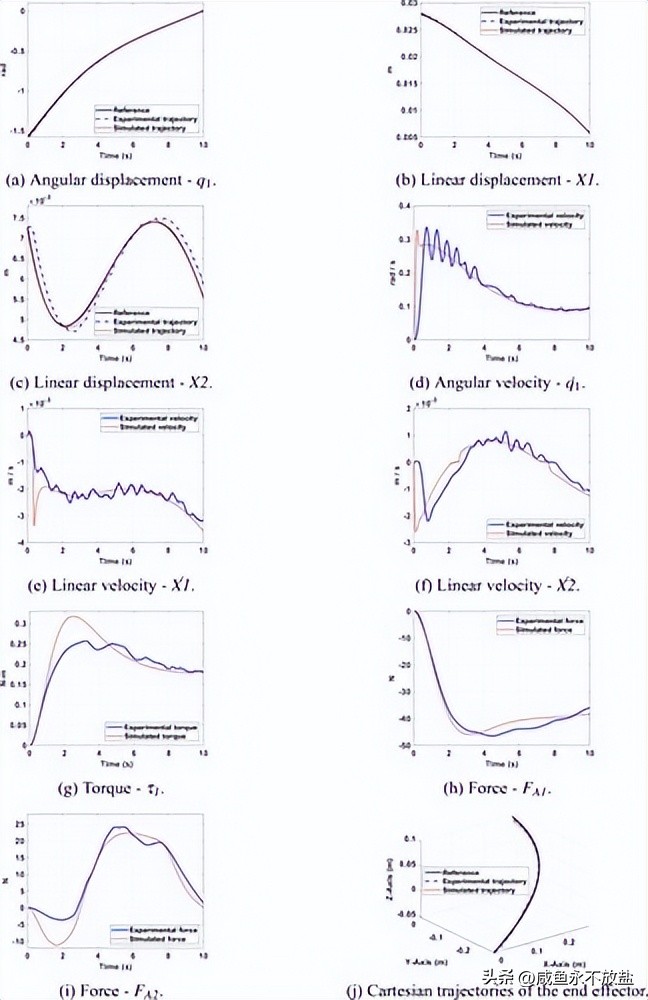
图中(a)-(c)显示了q1、X1和X2的位移,而图中(d)-(f)分别显示了q1.、X1.和X2.的速度。电动机转矩显示在图(g)中,线性执行器F一个1的力显示在图(h)中,线性执行器F一个2的力显示在图(i)中。
末端执行器的笛卡尔轨迹显示在图(j)中,而建模百分比误差可见于表中。对于这个轨迹,线性位移X1的数量级大于线性位移X2的数量级,但是线性速度的数量级相同。当分析线性速度X1.时,可以看到从第二秒到第八秒,X1.在-2x10-3m/s左右波动但没有突变。
此轨迹表示回到原木装载区域。起重机的运动从轨迹1的结束点开始,即笛卡尔坐标为(0.2828 m,0.0014 m,0.0987 m),而其运动在笛卡尔坐标(-0.0189 m,-0.2676 m,-0.0426 m)结束。

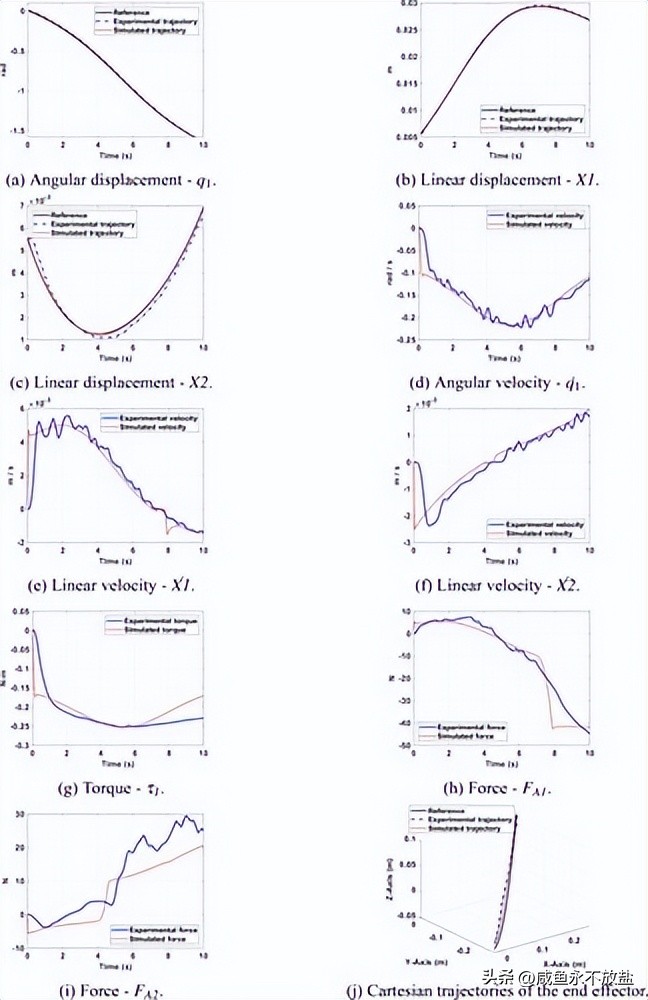
对于轨迹2,下图(a)-(c)分别显示了q1、X1和X2的位移。速度q1.、X1.和X2.分别在下图(d)-(f)中展示。对于轨迹2,线性位移X1的数量级仍然大于线性位移X2的数量级,而线性速度的数量级相同。
当分析线性位移X1和X2时,可以发现在执行任务时会有运动方向的变化。对于X1,这种变化发生在第7秒左右,而对于X2,则在第4秒左右发生。这些运动方向的变化在仿真速度中更容易识别,因为仿真显示了突变速度的情况。
最后一条轨迹旨在在笛卡尔空间中执行一条直线。对于此路径,起重机的运动从笛卡尔坐标(0.37439 m,0 m,-0.06156 m)开始,到达笛卡尔坐标(0.3882 m,0 m,0.1307 m)结束。第三条轨迹的参数单位用米表示,即0≤t≤10 s。
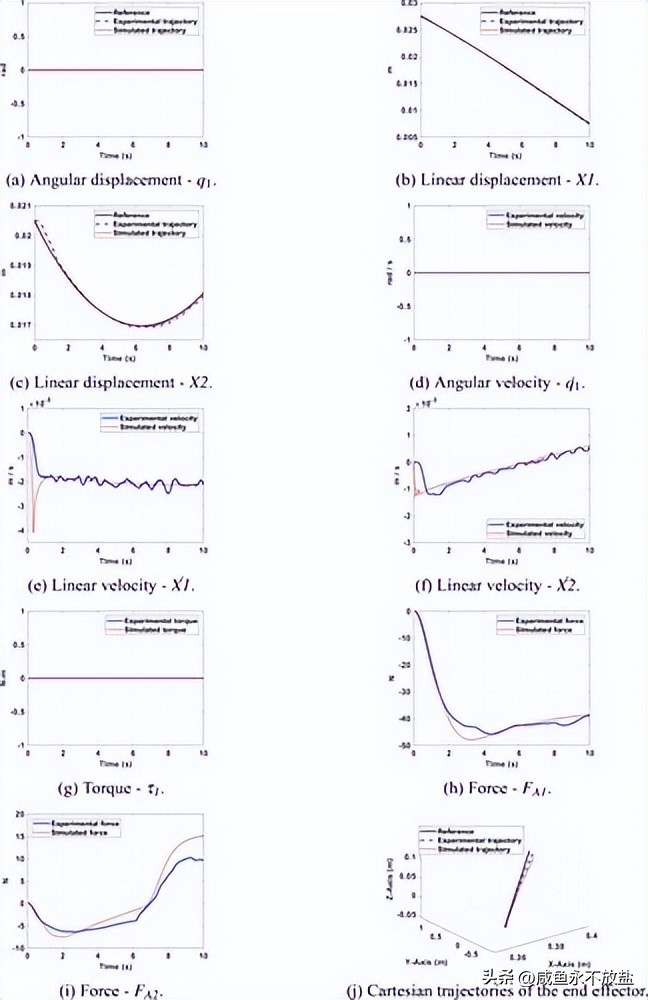
对于最后一条轨迹,图(a)-(c)分别显示了q1、X1和X2的位移。速度q1.、X1.和X2.分别在图(d)-(f)中展示。电动机转矩和线性执行器A1和A2的力分别在图(g)-(i)中显示。
对于轨迹3,线性位移的数量级相同,将第三条轨迹的线性位移X1和速度X1.与轨迹1的X1和X1.进行比较,可以发现它们的行为非常相似。这得到了通过比较力F一个1的大小和行为模式来验证。
对于位移X2,在第6秒左右可以观察到运动方向的变化。这种变化在力F一个2中更加明显,因为可以感知到行为模式的突变。
此次实验所呈现的实验和仿真结果表明,在位移、速度和力的模式方面,实验和仿真结果是一致的,而且所有的百分比误差均低于15%。在执行轨迹2和3时,线性执行器A一个2的百分比误差最大。
这些值被调整使得所有轨迹都可以在不需要修改这些值的情况下执行,执行后可以相应地调整不同的控制器增益值以适应特定的任务。需要注意的是增益值之间的差异是由于线性和旋转执行器的动力学不同,这意味着必须考虑不同的值和范围。

«——【·结论·】——»
从此次研究可以看出林业起重机制造商选择生产更重、更大的机器,以满足市场对更高生产力的需求。
此次提出的动态模型还减少了林业起重机基于模型设计方面的知识空白,因为以前没有考虑过封闭运动链,导出描述起重机动力学的方程的步骤是将多个开放式运动链作为主动变量关节的函数进行考虑。

对于所有三个测试来说,模拟结果的动态响应比实验结果更快,这是由于存在不考虑在模型中的不同的动态和电效应,结果表明具有封闭运动链的前进式起重机的系统动态响应可以用本文中所提出的数学模型来描述。