文丨神奇的玛利亚
编辑丨神奇的玛利亚
前言
为了构建一种能够达到细胞敏感驱动的材料,我们研究了PAniCP和PNIPAAm水凝胶的合理组合。
在这种均匀的互穿聚合物网络中,PNIPAAm同时提供热响应驱动能力和机械灵活性,而黑色导电PAni同时充当 光热转导器和压阻传感器 。
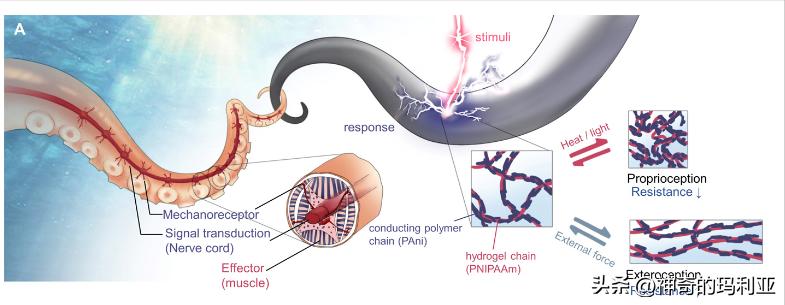
材料变形时的电阻变化是由PAni网络的协同变形改变电气通路引起的。
当温度升高超过PNIPAAm的较低临界溶液温度时,随着PAni网络通过PNIPAAm的标记,温度驱动的收缩变得更加紧凑,水凝胶的电阻率大大降低。
制造和性能
为了获得CP-水凝胶复合材料,使用了两步合成方法,由于两种合成的不相容性,形成水凝胶并随后浸泡在CP预聚物溶液中,以原位聚合CP围绕现有的水凝胶链。
水凝胶的亚微米级孔几乎不允许CP分子充分渗透到整个水凝胶基质中,这导致富含CP的外壳和非导电核心,阻碍了其在传感和致动中的应用。
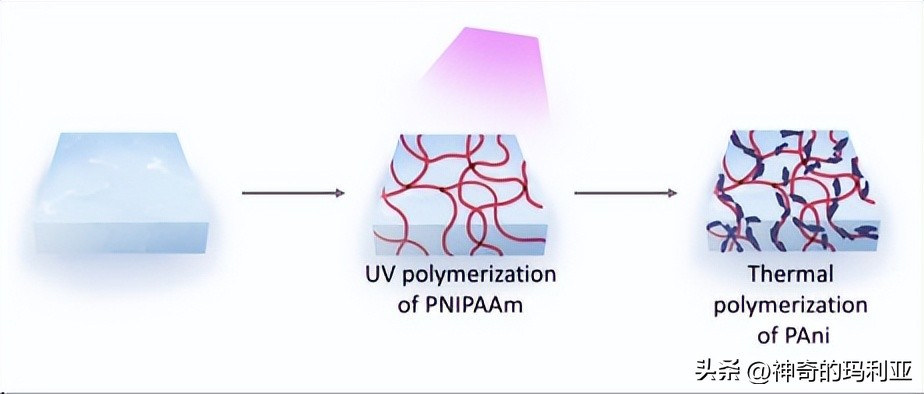
为了解决不均匀性问题,我们设计了一种 聚合技术 ,首先将PNIPAAm和PAni前驱体混合物在紫外光下照射以聚合PNIPAAm,然后在室温下保持过夜以聚合PAni。
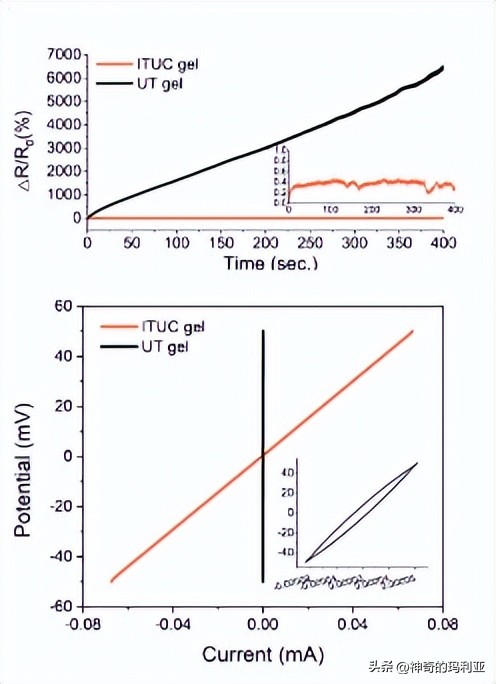
紫外和热聚合的水凝胶,称为UT凝胶,在整个PNIPAAm网络中均匀分布PAni,先用交流阻抗法测量UT凝胶的电导率。
在直流电下,UT凝胶的电阻随着时间的推移仍然不稳定,并且在1兆欧的尺度上,接近纯水的电阻,因此如果将其用作应变传感器,则无法准确反映材料变形。
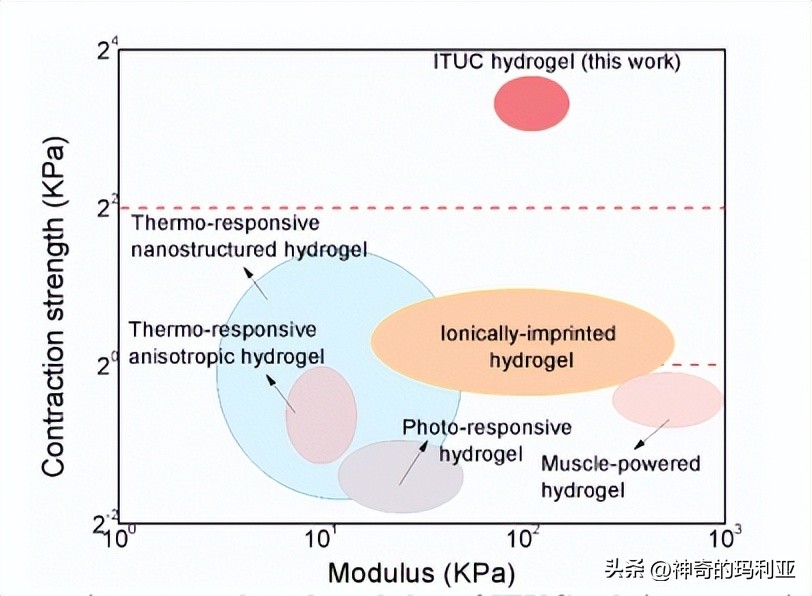
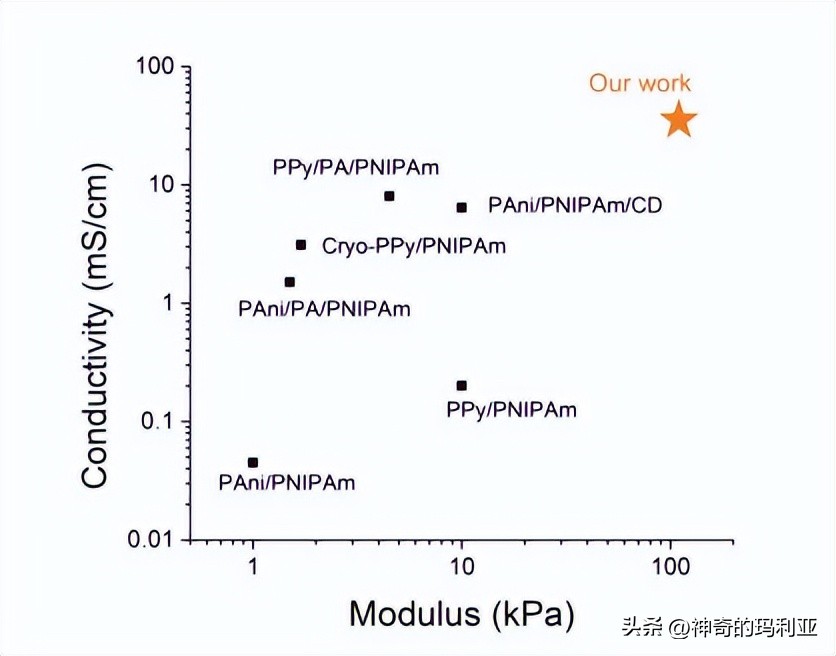
尽管CP的负载量很高,但与纯PAni水凝胶相比,所得的电导率和机械性能相对较低,需要修改以进一步将电导率从10至100mS/cm提高,将模量提高到0.1至1MPa,以提供高性能传感和强大的驱动。

推测在聚合物基质中引入非导电PNIPAAm和高含水量可能阻碍了导电途径,液相聚合凝胶遭受无法控制的反应动力学,导致形成断开的CP纳米聚集体,因此缺乏确保连续电子传输和机械强度所需的理想的紧凑和互连的填料。
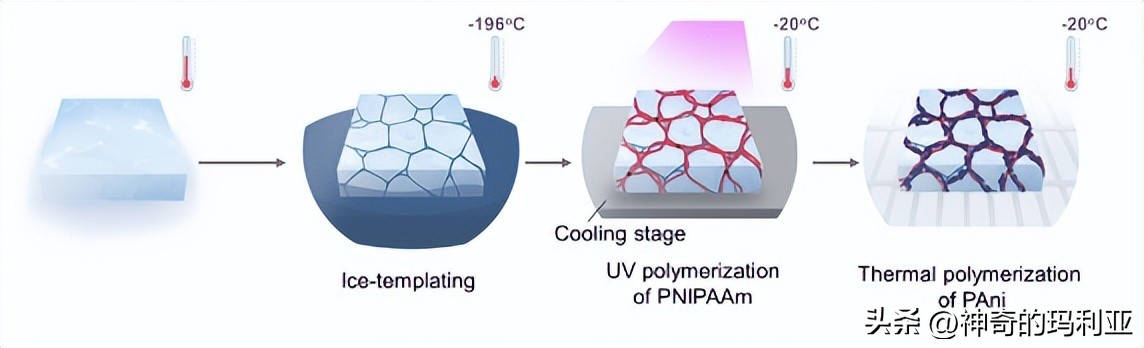
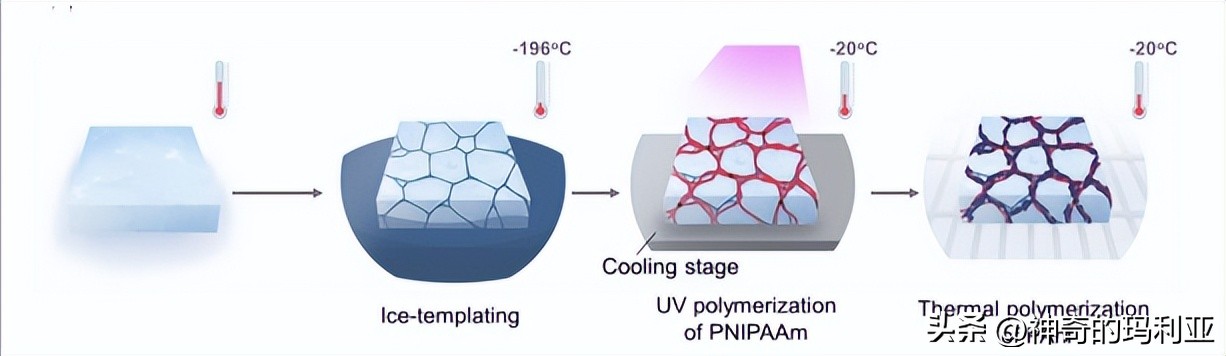
为了在微米以及纳米尺度上产生致密的CP链堆积,引入PAni的冰模板和冷冻聚合来修改UT合成,将混合溶液在液氮下快速冷冻以形成冰模板,在零下环境中分别对PNIPAAm和PAni进行紫外和冷冻聚合。
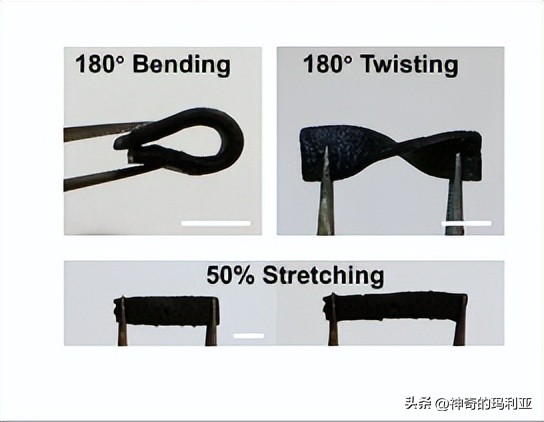
制备的凝胶称为ITUC凝胶,改性的ITUC凝胶在机械上更加坚固,能够自由弯曲到180°,被拉伸并扭曲到180°而不会造成任何材料损坏。
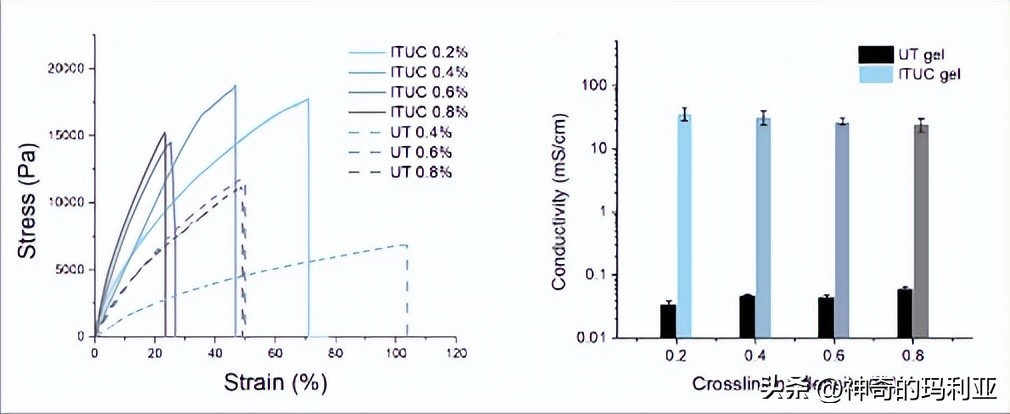
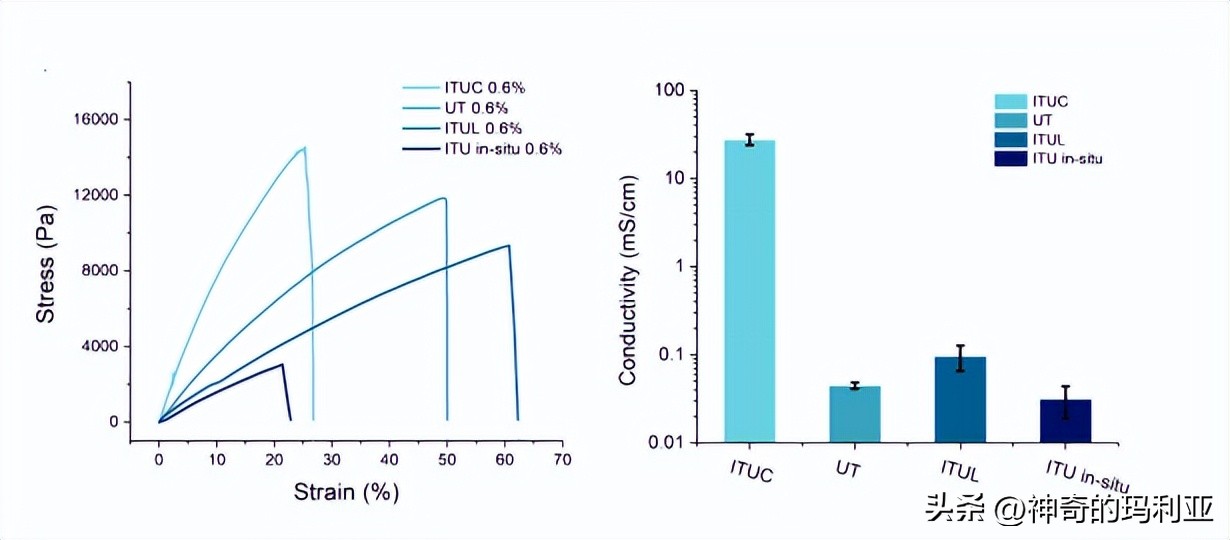
从拉伸测试中,具有不同交联密度的ITUC凝胶显示出高达0.18MPa的可调拉伸强度和250至386%的模量增强UT凝胶。
具有0.2wt%BIS的ITUC凝胶具有良好的变形性,断裂拉伸高达170%,表明应变传感和驱动范围很宽,ITUC凝胶表现出24.6至36.8mS/cm的高电导率 ,比UT凝胶要高出103倍。
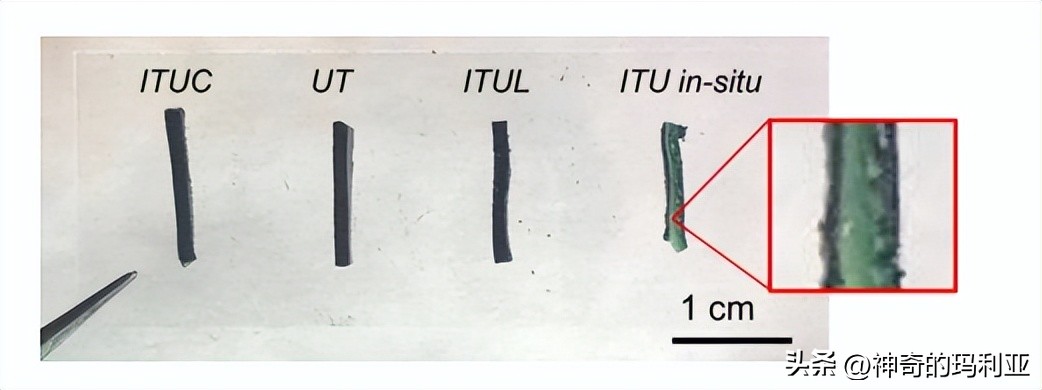
为了更清楚地确定实现高电导率的关键因素,分别通过紫外-冷冻聚合PNIPAAm,从PNIPAAm-PAni前体混合物中液态聚合PAni和UV-冷冻聚合PNIPAAm,然后浸入PAni前体中,并以液态原位聚合PAni。
与采用两步原位聚合方法的UT、ITUL、ITU原位和文献相比,ITUC凝胶的力学性能和导电性均有显著提高。

导电性的巨大增强可归因于PAni的冰致密化效应和低温反应,允许更致密的堆积并有效减轻PAni的纳米聚集,促进连续的电子途径。
扫描电子显微镜图像还显示出更紧凑的微观结构,与UT凝胶的0至5μm孔相比,孔径更均匀,为2.5至10μm。
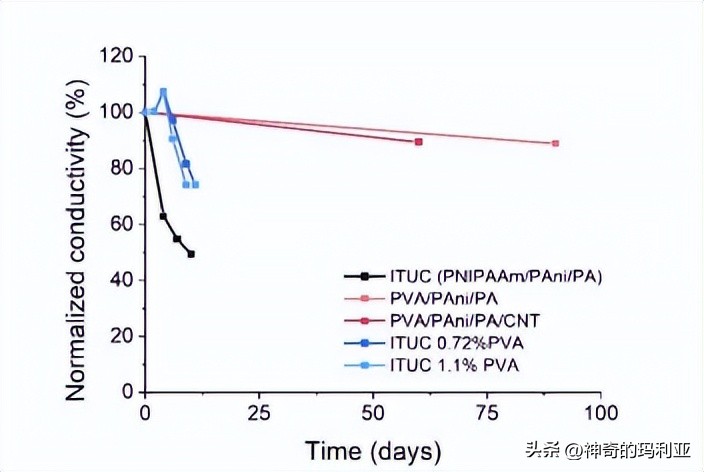
还研究了ITUC凝胶随时间持续浸泡在水中的稳定性,一周后电导率下降大约46%,这可能是由于在长期中性pH条件下掺杂剂的损失。
通过在现有的ITUC凝胶中加入聚乙烯醇,可以实现更好的电子稳定性,这可能是由于PVA的强氢键以稳定掺杂剂植酸。
驱动性能
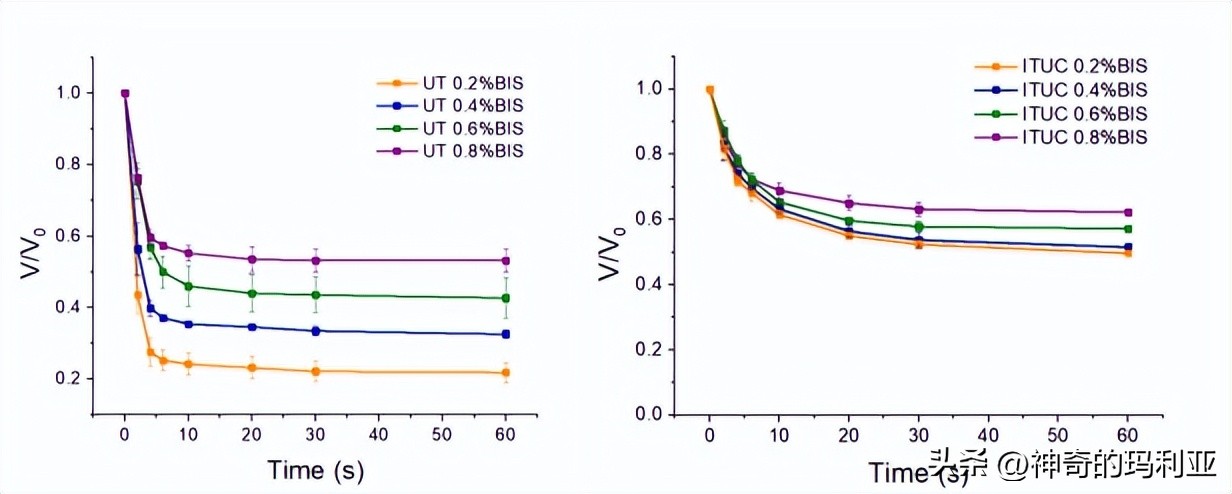
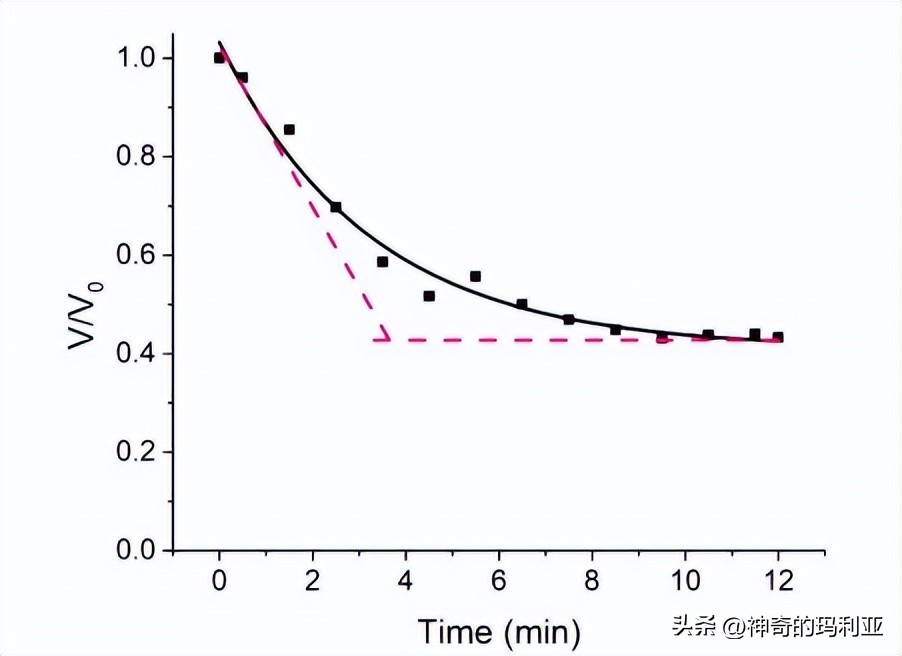
为了检验ITUC水凝胶的驱动能力,我们分析了40°C的水凝胶收缩率和室温下的回收率,ITUC凝胶在49分钟内收缩至7.1%,扩散时间尺度为8秒。
尽管水凝胶网络通过冰诱导的聚合物致密化效应而增韧,但与UT凝胶相比,响应驱动性能并未明显受损,但是ITUC凝胶的收缩速度比传统水凝胶快10至100倍。

水凝胶的显著快速体积变化源于具有开放孔的双连续微观结构,具有独特的低曲折度,有助于水快速扩散进出聚合物网络。
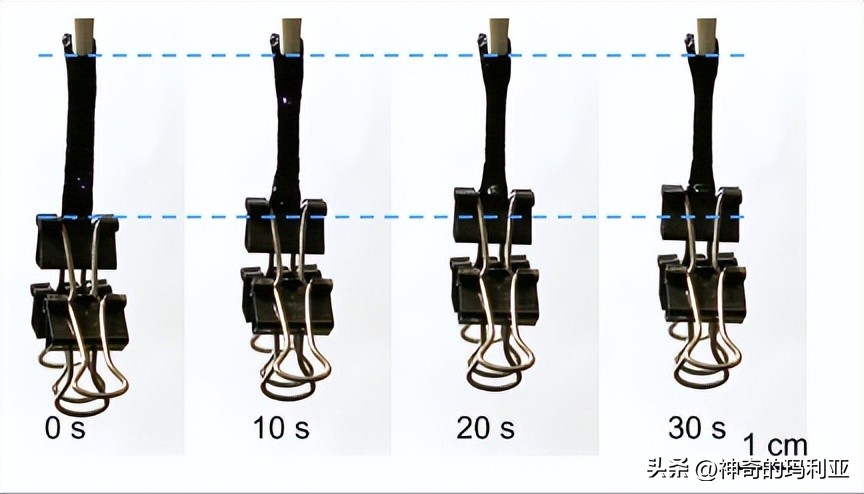
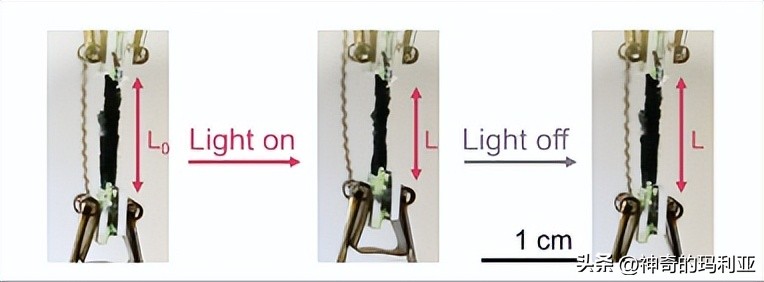
由于PAni的光热特性,复合水凝胶不仅可以通过热驱动,还可以通过光热机械机制驱动。在近红外光照射下,ITUC凝胶可以有效地收缩和提升高达其干聚合物重量171.6倍的重量。
此外由于复合水凝胶是均匀的,没有任何类似于传统物理集成系统中的成分梯度或界面,因此它们允许以 几乎无限的自由度 在几乎所有方向上驱动。
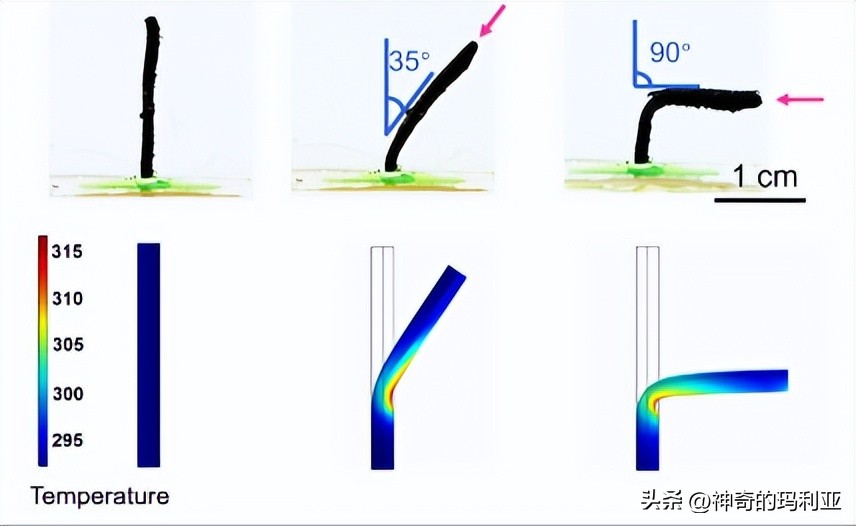
当近红外光以任意角度照射在水凝胶条上时,水凝胶向入射光弯曲,并通过实时自主重新定向精确地跟踪光源,当光线关闭时,水凝胶可以迅速恢复其原始未变形的构型。
这种方向性的不对称运动归因于水凝胶的温度梯度,其中照明侧的温度升高到LCST以上,而阴影侧的温度仍低于LCST,导致照明侧的局部收缩和凝胶的整体弯曲。
一旦弯曲条到达光的方向,它就会稳定地瞄准由动态光,材料相互作用产生的内置反馈回路控制的入射光,这种自主信号跟踪行为展示了一种分散的、开环的自控致动。
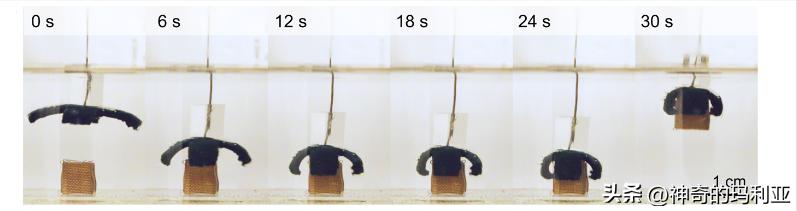
除了通过温度梯度实现的目标跟踪外,我们还验证了ITUC凝胶可以通过在双晶片组件中用钝化层无缝粘附凝胶,在高温下弯曲到确定的方向。
通过组装四个水凝胶臂,我们成功地制造了一个 十字形软夹持器 ,它可以在热水中快速抓取物体,这些材料可以很容易地与其他材料结合,为复杂的任务构建一个系统。
传感性能
ITUC水凝胶具有高导电性和拉伸性,能够在机械变形下用作压阻式应变传感器,首先ITUC凝胶在宽交流频率范围内显示出理想的0°相位角,而UT凝胶在低频下具有大于40°相位角。
ITUC凝胶的电流-电压曲线是一条理想的对称直线,而UT凝胶在封闭区域下表现出电容行为,ITUC水凝胶的导电性以欧姆电子传导为主,具有较小的离子衍生传导,这对于高传感性能非常理想。
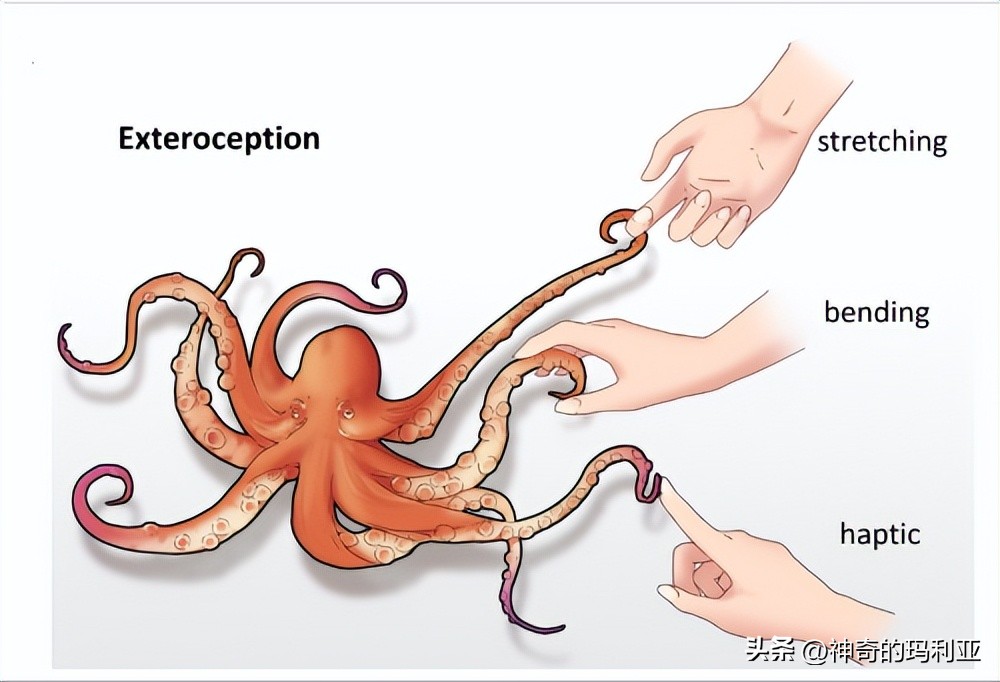
具有高拉伸性和响应性的ITUC凝胶不仅使外部感觉能够感知被动变形,而且本体感觉能够监测其自身运动以响应刺激,对于外部感受,我们首先在单轴拉伸下进行了应变传感。
在相应的拉伸应变下,灵敏度比PEDOT/PVA和石墨烯/PAAm凝胶传感器高,灵敏度的提高可归因于通过冰模板化低温聚合获得均匀连续的CP网络,而没有团聚物。
在被动变形过程中,聚集较少的微观结构可以顺应地反映凝胶的宏观拉伸,从而产生更高的机械鲁棒性和感觉能力。
除了拉伸模式外,水凝胶还可以检测弯曲和压缩,这证明了其作为曲率传感器和触觉传感器的潜力。
关于与生物组织相似的机械性能和水凝胶的相容性,ITUC凝胶可用于人体运动监测,安装在人体手指上的ITUC凝胶可以精确地感知人体手指在不同角度弯曲和恢复过程中的运动。
体细胞敏感驱动
本体感觉通过实时监测其自身的主动驱动行为得到进一步证明,该行为模仿生物体中物理状态和运动的自我感应,例如章鱼手臂的自我监测伸展或卷曲。
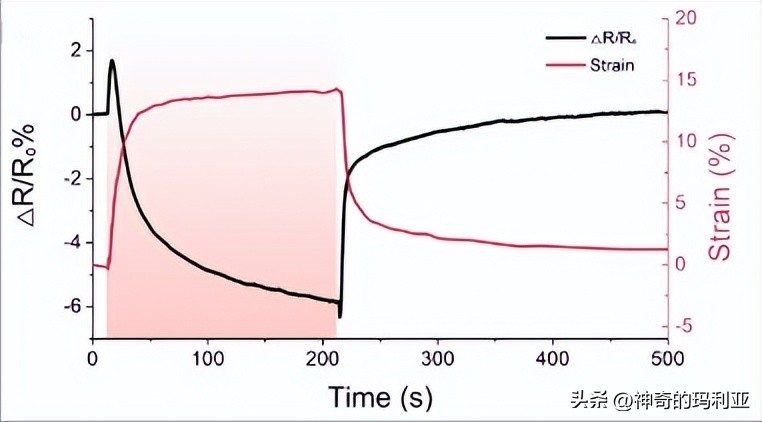
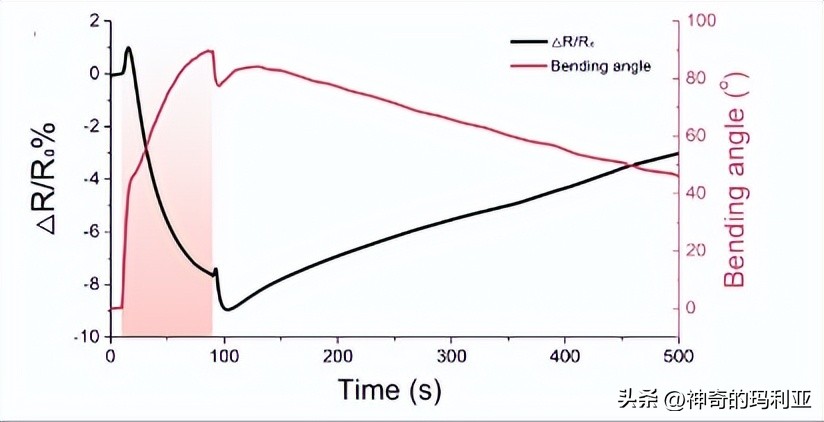
通过在底部放置负载来演示悬挂的ITUC凝胶的动觉缩短、伸长,在近红外光照射下,凝胶条缩短,电阻在最初的几秒钟内略有增加,然后不断下降。
假设初始相对电阻变化尖峰归因于PNIPAAm网络的快速微观结构变化,形成部分隔离单个PAni链的团簇,断开的团簇导致凝胶中的电阻瞬间增加。
整个动态聚合物网络的进一步收缩使团簇重新连接回连续电子途径,导致连续电阻降低,但是在关灯后,电阻最初降低到下限以上,然后逐渐恢复到初始状态。
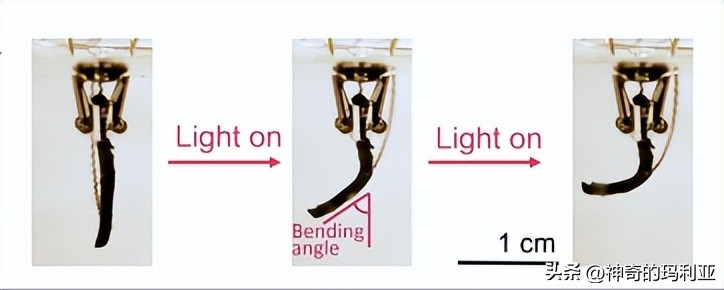
复合材料执行类似的本体感受驱动,但由于其非水性质,产生的力要高得多,在空载条件下的悬挂凝胶中也成功展示了光响应弯曲、不弯曲致动的实时监测,通过凝胶本身成功实时监测。
在灯关闭时其形状恢复期间轻微的过度弯曲,可能是由于前表面过热而没有内置反馈锁,在由快速聚合物网络变化引起的打开和关闭灯的最初几秒钟内观察到类似的电阻变化峰值。
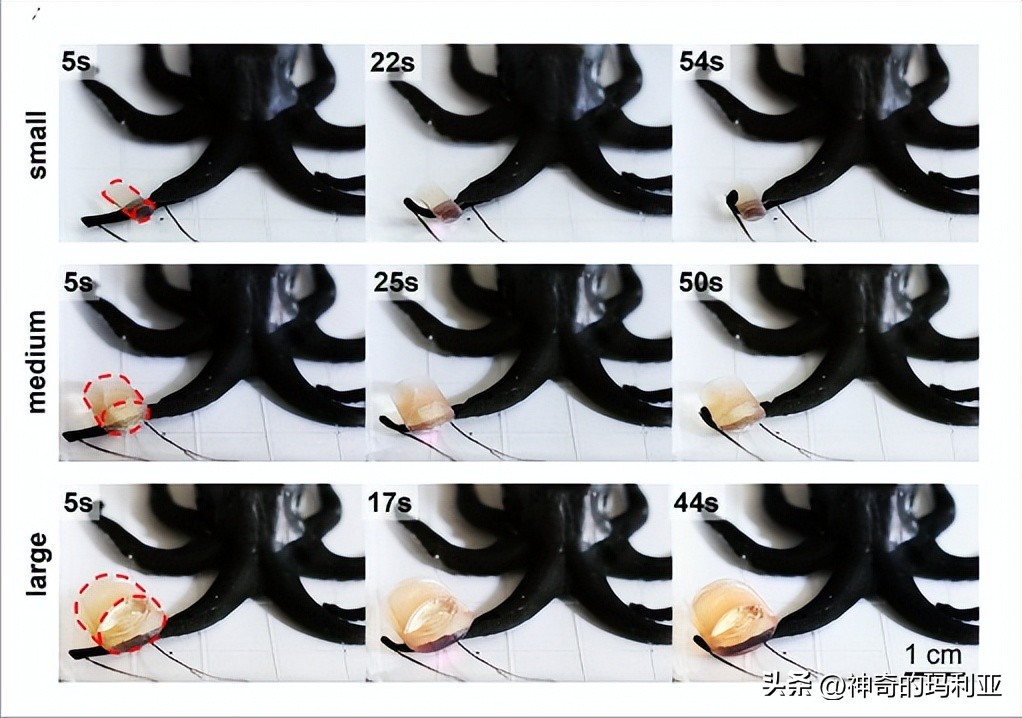
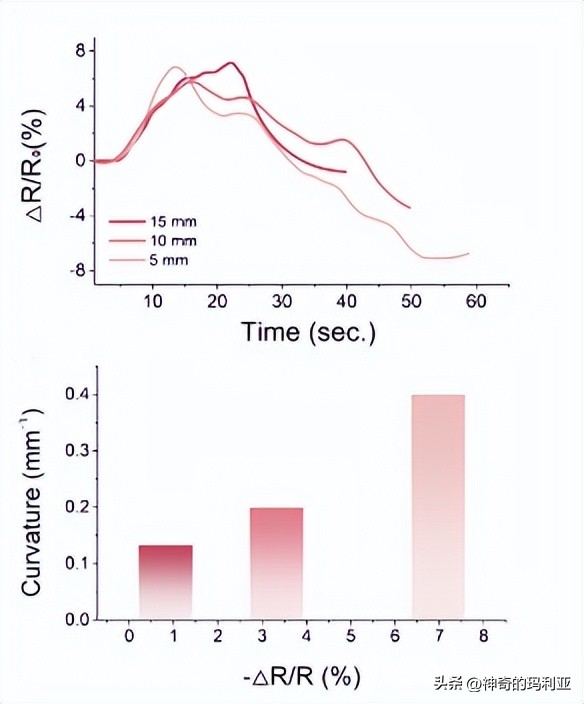
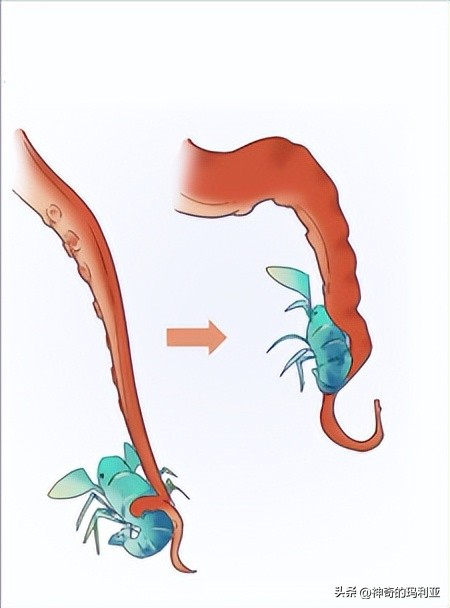
为了充分展示体感反馈在软机器人系统中的效用,我们将ITUC凝胶组装成章鱼作为软本体感受臂,章鱼臂从直的非活动状态开始,在近红外照明下弯曲并缠绕在一系列不同大小的圆柱体杆上。
记录的电阻曲线分别表示感知和抓取三个不同直径物体,当臂完全缠绕在7毫米圆柱体上时,阻力下降5%,而在感知和抓住0毫米圆柱体时,阻力在相对较短的时间内下降8.15%。
所以抓取过程中阻力变化的大小和时间都为本体感受抓取策略对未知物体的形状识别提供了潜力。
闭环驱动
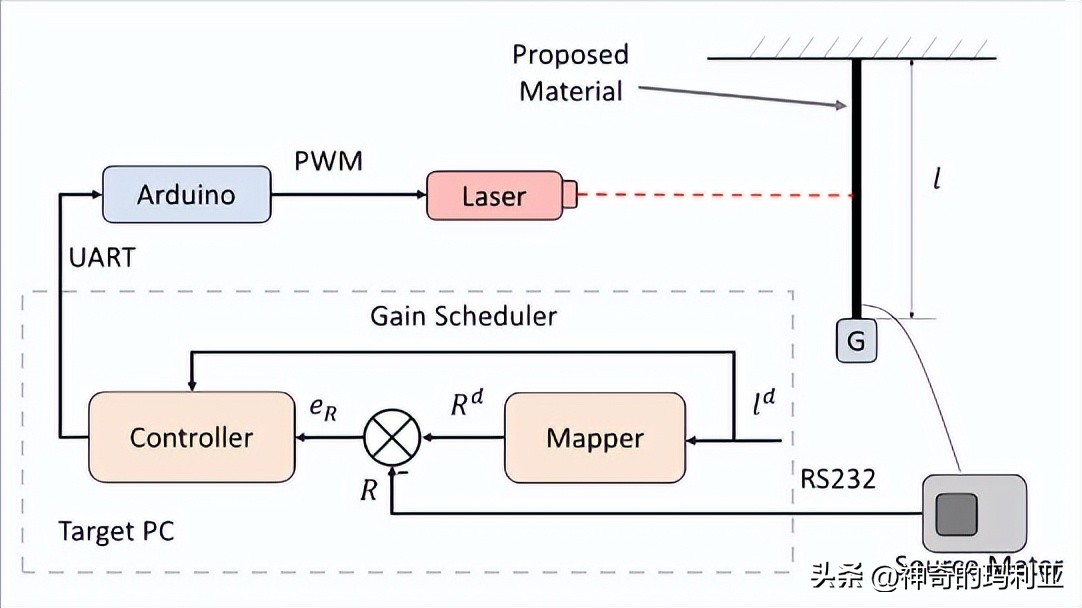
作为凝胶统一感觉和执行功能的关键证明,我们研究了一种闭环控制系统来模拟生物神经肌肉系统,该系统涉及神经冲动从受体向内传递到脊髓,向外传递到效应器,非常类似于肌肉或腺体触发冲动接近或缩回外部物体或环境刺激。
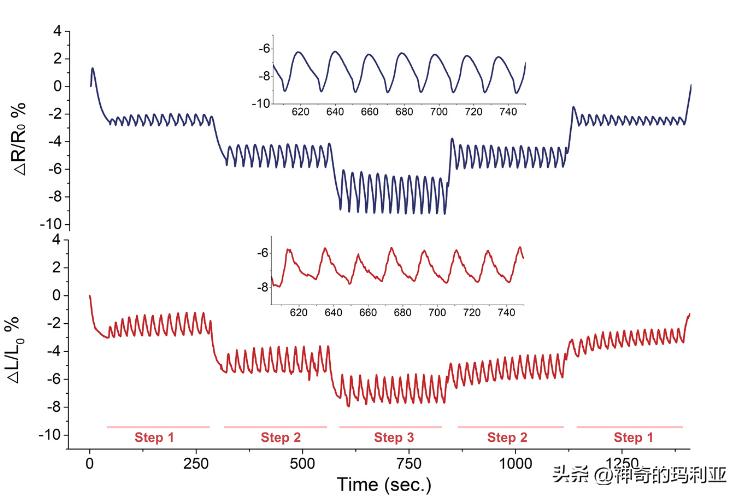
控制算法旨在通过向控制器提供与实时长度变化相关的体感反馈并相应地控制臂收缩/松弛运动来精确调节负载ITUC凝胶臂的伸长、缩短变形。
简单来说,安装一个增益预定的砰控制器来收集电阻反馈,并相应地操纵NIR强度,它成功地将臂长保持在三个逐步水平,精度为0.16毫米。
当相对电阻变化逐渐下降时,在达到目标长度的平衡之前观察到变形应变变化的轻微延迟,而在目标长度斜坡上升期间不存在这种延迟,这归因于其恢复过程中的凝胶收缩相对较快。
在受控臂伸长步骤中观察到上述强照明下的异常电阻尖峰,但最终可以通过 降低光强度 将其最小化,当PNIPAAm网络的快速收缩被控制为轻度发生时,通过对光强的有效微调也可以抑制振荡幅值。
背景非零弱照明显著提高了响应速率,使凝胶收缩和弛豫的电阻响应更加对称,这可能是由于连续照明使样品的温度基线较高。
由于样品在接近其LCST的温度下保持温暖,因此需要较小的温度变化和更短的时间才能触发样品变形,所以切换时这种较小的光强度差异也导致沿目标电阻和变形的振荡较小。
在此概念验证的基础上,校准曲线稳定性和振荡幅度的剩余挑战将通过进一步了解和优化ITUC水凝胶的刺激响应动力学和材料衰减,评估电阻-温度依赖性,并使用更精细的控制方法来解决校准曲线稳定性和振荡幅度的剩余挑战,以获得更好的性能和更复杂的机器人任务。
结论
在这项工作中,我们成功地证明了实现分子神经支配体敏感机器人材料的概念,该材料基于由一锅合成产生的导电和响应聚合物网络组成的 导电水凝胶复合材料 。
非常规冰模板低温聚合策略实现了在单一单片材料中集成传感和执行功能,有效地解决了CP水凝胶在不均匀性、聚集形成以及由此产生的直流电压下低电导率和较差的感官性能方面的长期挑战。
这种材料制备方法是通用的,能够将传感和执行功能组件的广泛选择耦合到各种智能材料中。这种混合材料设计不仅可以保留每个组件的功能,还可以协同实现传感驱动所需的高机械和电气性能。
与传统的多材料集成系统相比,体感致动材料允许任意传感定位,提供独立的多个传感节点,并且可以针对广泛的应用进行定制设计,包括演示的基本机器人任务,如收缩、弯曲、物体提升和物体抓取,具有开环和闭环控制算法。
该方法还可用于制造具有多感官感知和移动性的微型机器人,这在当前大多数软机器人中已被证明是一个相当大的挑战,这种多功能材料可能有助于推动下一代具有逼真外观和性能的软机器人的发展。