
乐行天下机器人事业部销售总监 陈鎏
在导航方面,我们一直在苦恼,如果是扫地机机器人,我们用一个激光雷达就可以定位导航,但是如果是体型稍大的服务机器人,它身高超过1米,那光一个激光雷达还不够用。
在机器视觉领域,目前市面上有三种主流的技术,一种是TOF深度摄像头,一种是结构光,一种是双目摄像头。
这三种技术中,结构光的应用是最多的,原因是成本低,然后就是另外一种TOF深度摄像头,它的技术很新,全球极少数企业掌握核心技术,最后是双目摄像头,在使用过程中,还存在很大的缺点。
这篇文章主要讲TOF深度摄像头,深圳市乐行天下科技有限公司(以下简称:乐行天下)在TOF深度摄像头领域就是具有代表性的企业。该公司机器人事业部销售总监陈鎏说:“国内乐行天下是第一家把TI技术进行商业化的企业,也是TOF深度摄像头造诣最前沿的企业。”
对于类似送餐机器人或是家庭服务机器人等大型的机器人,激光雷达+TOF深度摄像头是很好的解决方案。
1号机器人网记者:看了你们的网站,乐行天下很多人认为它是做平衡车,没想到还做深度摄像头,可否介绍一下,你们的深度摄像头产品有什么特点?与同行比有没有存在哪些差异的地方?
陈鎏:我们机器人事业部成立已有3年多的时间,专注于机器人的室内定位及3D视觉解决方案,TOF深度摄像头用到了TI的芯片,我们现在是TI在全国地区的IDH,是国内第一家也是唯一一家把TI TOF技术进行商业化的企业。

TOF深度摄像头
TOF(Time of Flight)是近期才开始火起来的技术,TOF是指光的飞行时间,原理是把激光进行调制,射出去后,计算空中飞行的时间,再得出这个距离,所以说它是非常灵敏的。是按飞秒计算的。光的速度是很快的,要捕捉这个速度很难,所以这项技术是很新的,全球就只有微软,PMD等极少数大公司拥有这项技术。
TOF测距会非常精准,它的精度是在毫米级别,我们自己研发了分散片,把激光均匀的分散到前方的空间,正常的激光都是椭圆形,中间亮,两边暗,但是我们把光均匀的分散在空间的周围,这也是我们的一个很大的创新点。
还有一点是,很多客户会问,它的抗环境干扰能力如何?TOF是目前抗环境干扰效果最好的方案,只要不是强烈的自然光直射镜头内部,其他的状况基本上不会有影响。
现在3D图像,主流技术有双目视觉、结构光、TOF,双目视觉是两个一模一样的摄像头通过对比捕捉图像,它的特点是成本低,缺点也很明显,就是算法非常复杂,然后环境光对它的干扰也很大。然后结构光,是类似将光进行编码发射出去,通过拍照的形式去对比,再确定它的一个距离,这种方式也有问题,一个是精度问题,一个是自然光的影响,可能也会对识别带来干扰。TOF相对来说,识别精准度高,算法开发简单,抗环境干扰小,是目前体验效果最好的技术方案。
1号机器人网记者:看了你们的介绍,激光雷达、深度摄像头都有在做,更像是一个解决方案商,如果是扫地机身上的应用,你们一般是给出怎样的方案?目前有没有案例可以介绍?
陈鎏:扫地机的高度就这么高,一个激光雷达就可以定位导航了。
但是有些服务机器人比较高,甚至达到1米以上,在一些复杂的环境中,像桌子、椅子等这些物体可能就识别不到,机器人行走会面临很大的问题。
所以我们的解决方案就是激光雷达+TOF深度摄像头。
比如送餐机器人,行走的底盘可以搭载激光雷达,在头部再安装TOF深度摄像头,这样就可以识别到周围高低的物体,在行走的过程中,避障周围的物体。

1号机器人网记者:现在的深度摄像头只能做到导航和避障吗?
陈鎏:深度摄像头除了用来做导航和避障,还有一些其他的应用,如:人脸识别,手势识别等,可以为机器人提供更加丰富的交互方式。
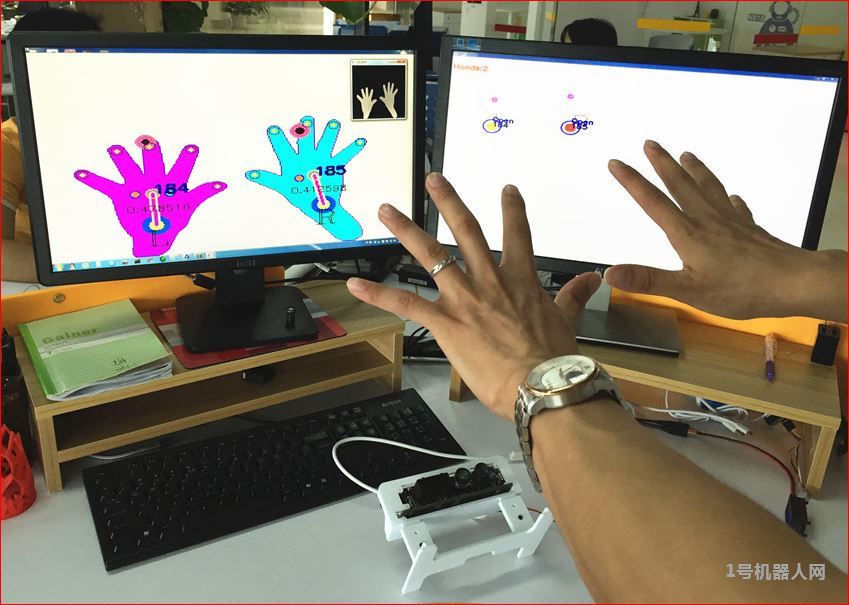
手势识别比较好的距离是0.8m-1.5m,目前是与第三方软件公司合作, 专门针对VR和机器人产品的手势识别的技术,每个手指头有4个关节自由度,加上手腕、手臂其余6个关节自由度,一只手一共是26个自由度。可以精确地捕捉到人体的手势动作,通过现场的演示,我们可以看到,现场识别的效果非常流畅,识别精度也是相当高,体验很不错。
1号机器人网记者:现在的深度摄像头应用场景有多广?以目前的技术水平可以让深度摄像头代替哪些产品使用?
陈鎏:TOF深度摄像头可以识别3D景象,所以应用范围很广,可以用于安防,用深度摄像头去检测里面的环境,也可以应用于交通,可以统计车辆通过的数量以及识别车辆尺寸。
应用于工业,在自动化仓库,可以识别包裹的大小,以及体积,可以分配仓库的空间,做一些调整。
甚至可以应用于医疗领域,医生在做手术的时候,现在可以凭空做一些手势,一些动作,反馈一些指令,就可以操作。
现在深度摄像头代表了最新的科研水平,现在的应用场景全部都是新的领域,前景广阔。
1号机器人网记者:深度摄像头的技术难点在哪里?
陈鎏:TOF深度摄像头,我们已经达到量产的阶段。
如果是从头开始开发,一个比较难的技术是光学,研发的时候要把光分散开,这里的投入是非常大的,而且镜头的投入也非常高,这颗镜头都是定制化,开模的费用都要上百万元;另外一点,是这个传感器应用的算法处理,因为这项技术的应用非常广泛,客户的需求也是多种多样,涉及到机器人,安防,交通,医疗及工业自动化,软件算法需要针对性的做相应的开发,这也是其中一个难点。
1号机器人网记者:国外有研究机构是通过深度摄像头去做实时建模,在马路上跑一圈,就可以把大概的地图绘制出来,我们想知道国内深度摄像头最新的技术可以达到什么程度?跟国外比,有没有差距?
陈鎏:理论上是可以的,我们正在做类似这样的室内环境建模的研究,目前已经有所成效了,把这套系统应用到室外只是时间的问题,另外对传感器的要求可能会进一步提高,需要测得更远,抗干扰性更好,这个相信技术的发展也会迟早实现。
国内的深度摄像头技术目前形势很好,无论是结构光方向,还是TOF方向,基本上都是走在世界的前列,而且类似机器人,VR,安防等智能设备的应用开发也是百花齐放,和国外相比,基本没有太大的差距。
1号机器人网记者:你觉得未来三年深度摄像头的技术会朝哪个方向发展?
陈鎏:我觉得会朝更加清晰化,更高像数的方向走,让画面越来越清晰,我们的最终目标是达到像人眼一样,观看世界。
当然这条路还很长远,我们要做的不只是让像素更加清晰,还要控制成本,甚至缩小体积,然后达到可以装在手机上的程度
很难想象10年后的机器视觉可以达到什么程度,技术的发展会带来更多的体验,可以肯定的是,将来的机器视觉会超越人眼。
1号机器人网记者:最后一个问题,谈谈未来三年你们的发展规划?
陈鎏:在技术上,我们一直在寻求突破,往更加高清化,更加小型化的方向走。
然后是在各个领域开拓市场,把我们的TOF深度摄像头应用到各个领域。所以未来三年的规划,重点在于开拓市场,在于市场的布局。
1号机器人网(www.1hjqr.com)机器人行业最权威媒体