精度0.1毫米内 这个灵巧机械手是航天员的维修利器
在阅读此文之前,麻烦您点击一下“关注”,既方便您进行讨论和分享,还可以给您带来不一样的参与感,谢谢您的支持。
10月31日,中国神舟十六号载人飞船安全返回地球,而神舟十七号的乘组成员汤洪波、唐胜杰和江新林则开始了为期六个月的在轨驻留。至今已经是他们在太空中度过的第十天。
本次神舟十七号任务中有一项特殊任务,即通过太空行走进行试验性维修作业。那么,在中国空间站长时间运行时如何保障宇航员的安全以及如何对宇天器设备进行维护呢?让我们一起来了解。
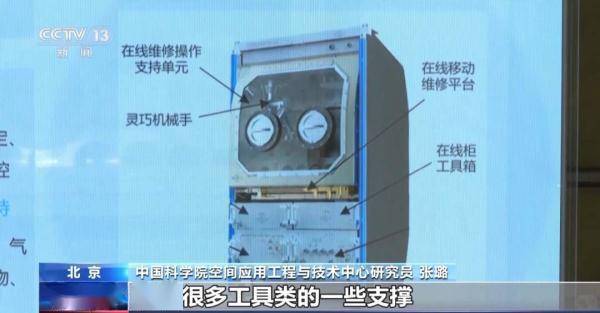
首先介绍在线维修装调操作柜,在中国空间站内外都配备着大量设备。当这些设备出现故障时应该采取怎样的处理措施呢?我国科研人员创新地研发了“在线维修装调操作柜”,这使得可以在轨道上对实验设备和载荷进行及时修复。
位于中国科学院空间应用工程与技术中心镜像大厅内共有14台实验柜,其中包括一个名为在线维修装调操作柜。梦天实验室里也配置有一个完全相同的操作柜,在需要时可使用此平台对损坏的设备进行修复。
中国科学院空间应用工程与技术中心研究员张璐介绍说,其他实验柜主要用于特定科学实验,而在线维修装调操作柜则属于支撑类实验柜。之前当设备发生故障时,航天员无法方便地在轨道上进行维护和更换。
而在线实际上指的是在轨状态下航天员可以对其他科学实验柜以及空间应用系统中的载荷装置进行更换、维修或操作需求,并且该操作柜提供了一系列支持措施如结构安装、洁净处理区域、机械臂协助等来保证这些维护工作能够顺利开展。其次是移动维修平台,在线 细节没有变化 继承原文描述 这样大型电话亭子大小符合人家背着箱子出去 套话不需要,“自身体积并不大”的意思被信息涵盖了 另外“拓展功能”有点模棱两可 为此中国 科学院 空间 应用 工程与 技术 中心 的 研究 先行 考虑到这个问题,设计进逄一些 拓 展 功能 ,例如 安 排 了 移动维修平台。
根据张璐的介绍,该平台可以用于在中国空间站中对大型设备进行维护。舱外大型载荷的安装、升级和拆卸等操作可以通过将该平台展开成一个约900毫米乘以700毫米大小的大板来完成。
这样,航天员便可在此板上固定并结合内部各种接口进行相应的维修操作。最后是灵巧机械手辅助作业,在之前我们已经了解到中国空间站有大小两只机械臂,其中大机械臂展开后长度约为10米,并且具备最高25吨负载能力,在太空中能够爬行并捕获像问天实验室和梦天实验室这样体积较大的舱段。
而小机器人 臂长 约5 米 ,ZUI 大 能 承受3 吨 重量 包括 协助处理物品及 达到0.1 毫 米 的精度要求 在 进 行 更紧密 和复杂 的工作例如触碰 或者 拆除 组件总结起来,在线 细节使用讲 数字 讲人就好 几个模棱硝 句 使用语气简洁归纳全部信息 就是这个仪器利于在太空中对外设备进行修复工作,舱内柜架则用来研究。通过操作台处理更多机械类的活动支持等,将所有道具核心功能 都紧密结合起来。

以上关于中国空间站维护措施的讲述说明了宇航员安全和设备维护的重要性,并展示了在线 细节配合服装组成员进行电视转播 优势通过技术研发 和 设计实现 以及 空间站 的装置 类型设计并开放 实行 多个科学实验 柜架 来帮助 在轨 宇航 员 对各种情况下 发生故障 设备 进行检查 更换等 工作 加强 船上已经构建好部分仓储 等 经典特点 。为了满足航天员在空间站内进行维修操作的需求,中国科学院空间应用工程与技术中心研究员张璐介绍了一些关于机械臂和在线维修系统的相关信息。
首先是关于小机械臂,它具有更高的操作精度,并可单独使用或与大机械臂连接形成组合臂。通过这种方式,航天员可以扩大机械臂可到达范围约15米长。
此外,在空间站内还有一个灵巧机械手,位于名为“潘洛克”实验舱中的在线维修装调操作柜里。展开后长度约七八十厘米,并拥有0.1毫米以内的操作精度。
这个灵巧机器手配备了7自由度关节,能够轻松转动到各种姿态,并在狭小空间完成复杂轨迹规划和高速响应要求下帮助航天员完成许多复杂维修工作。进一步介绍,在线实施装调任务时也需要根据不同需求更换末端工具来执行不同任务。
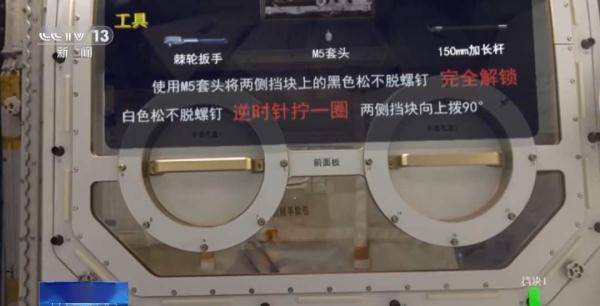
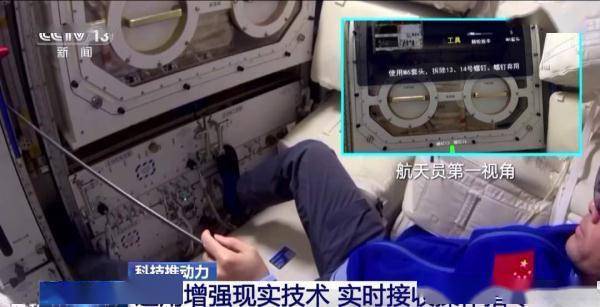
例如, 螺钉拧紧、简单采样等琐碎任务可以使用小型夹爪或电动剪刀等末端工具进行操作。此外,科研人员还设计了搭载增强现实技术的在线维修系统。
航天员佩戴一副眼镜后,无需查看任何操作手册,即可实时接收维修指令,从而便捷地进行在轨设备维修工作。空间站内共有14个实验柜由各种不同组件和科学设备组成,并且类似家用电器一样, 这些设备也会存在使用寿命或故障问题, 航天员必须在太空环境下对其进行诊断、维护和装配。
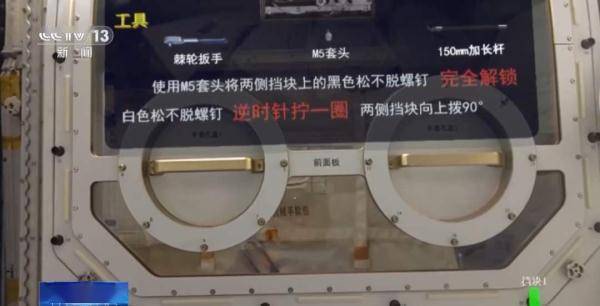
为了更加迅速、方便地执行这些任务,在线诱导技术系统应运而生。通过佩戴智能眼镜采用增强现实技术,在物体上精准叠加数字化信息来引导航天员完成相关操作任务。