文丨神奇的玛利亚
编辑丨神奇的玛利亚
前言
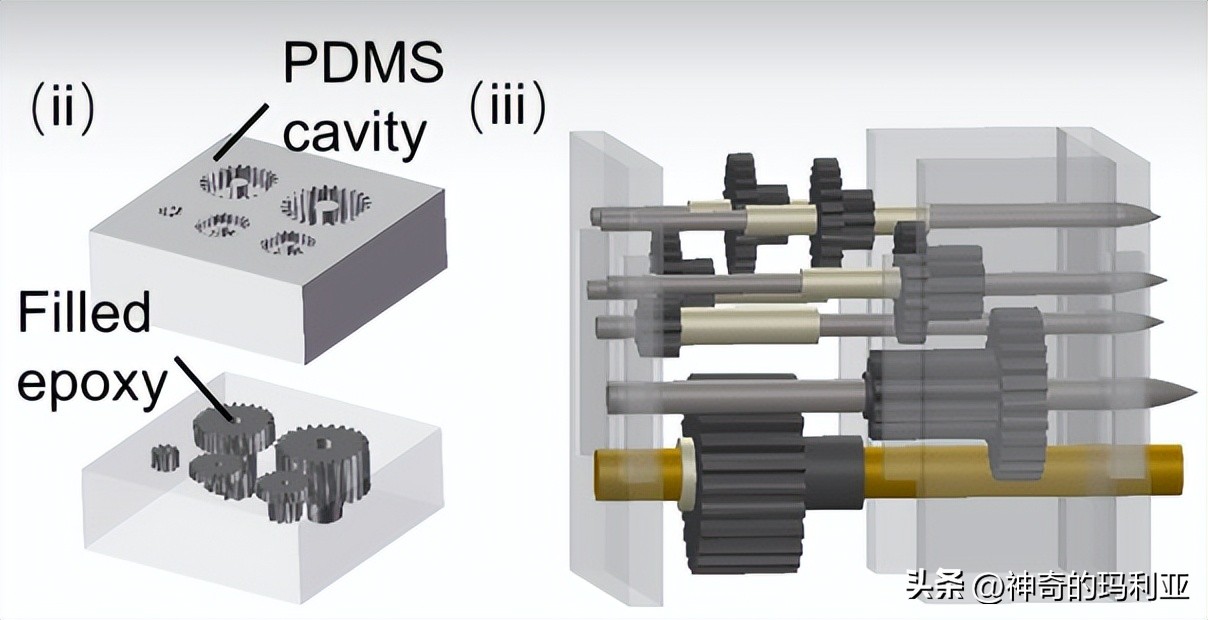
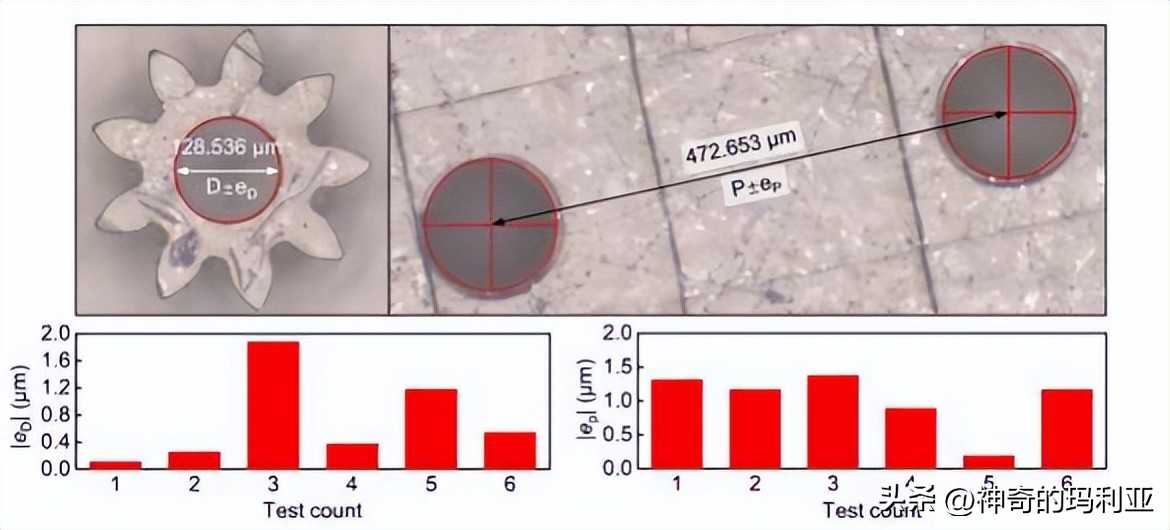
微型磁性执行器的有限力或扭矩输出,限制了磁性毫米级机器人的运动性能和功能,齿轮箱使用直径低至270微米的微齿轮组装,并通过铸造由 铝填充环氧树脂 制成。
通过将磁盘连接到输入轴,变速箱可以通过,不超过6.8毫特斯拉的旋转外部磁场驱动,以在0赫兹时产生高达182.40毫牛顿米的扭矩。
扭力的传输效率
在25到1赫兹的驱动频率范围内,变速箱在空气中的传输效率在29.2%到1.40%之间,当变速箱在粘性液体中驱动时,变速箱的传输效率会降低。
这种微型齿轮箱可以无线访问并与各种功能模块集成,以反复产生较大的驱动力、应变和速度,将能量储存在弹性部件中,并锁定机械连杆。
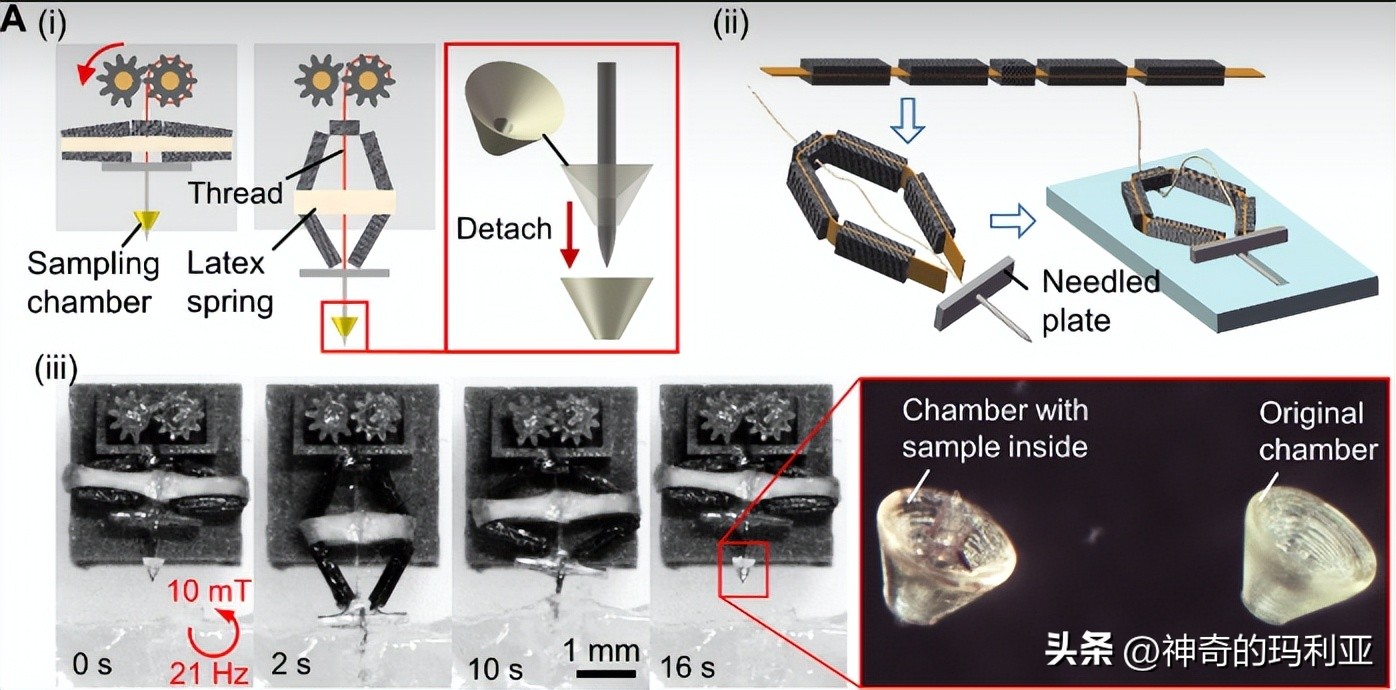
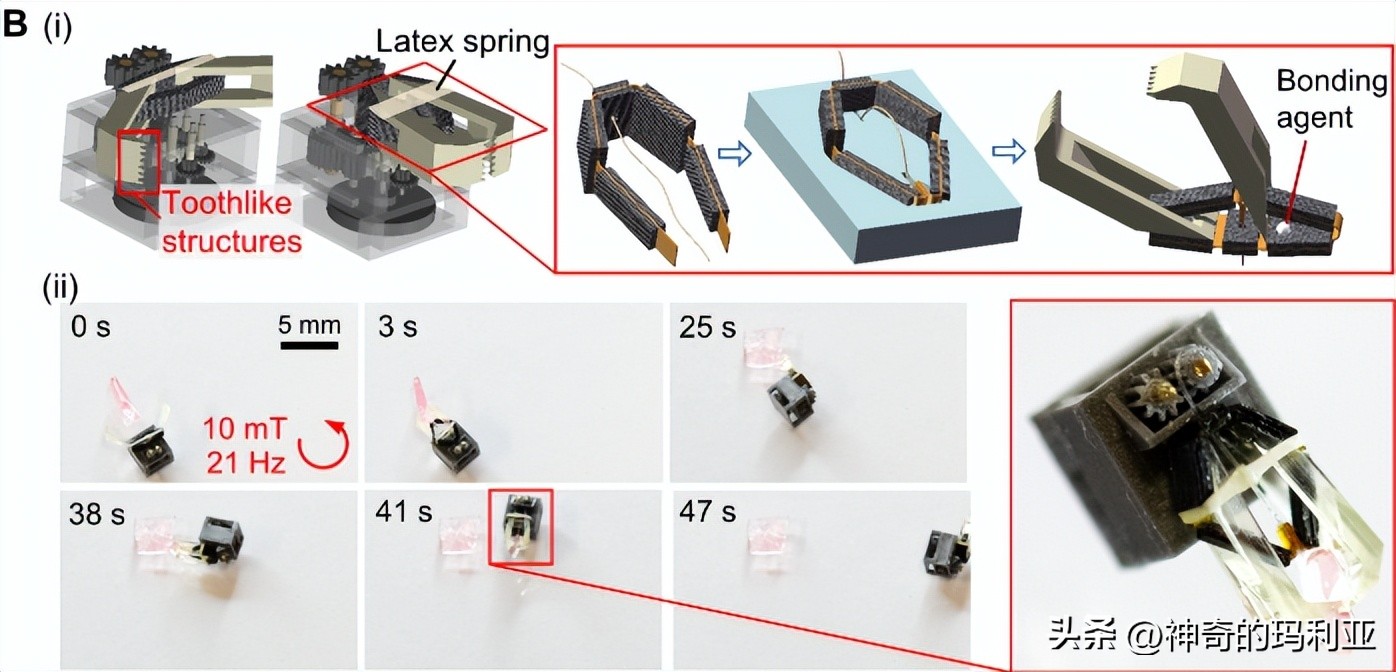
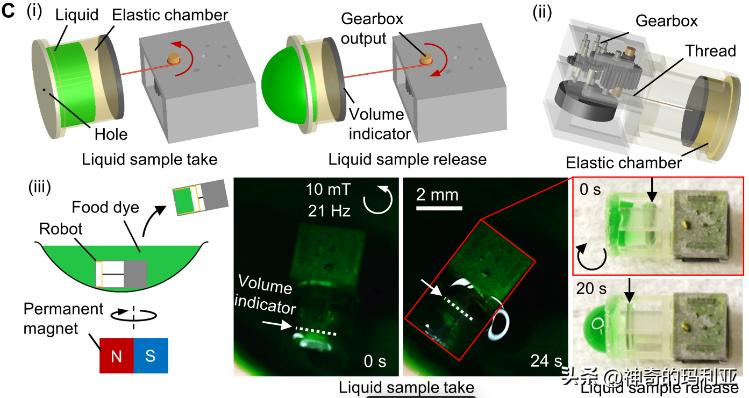
这些特性使我们能够实现可以在平坦基板或管内爬行的蠕动机器人,具有可调跳跃高度的跳跃机器人,可以通过抓取对固体物体进行采样的夹紧机器人,可以从目标内部取样的针刺机器人,以及可以收集或释放液体的注射器机器人。
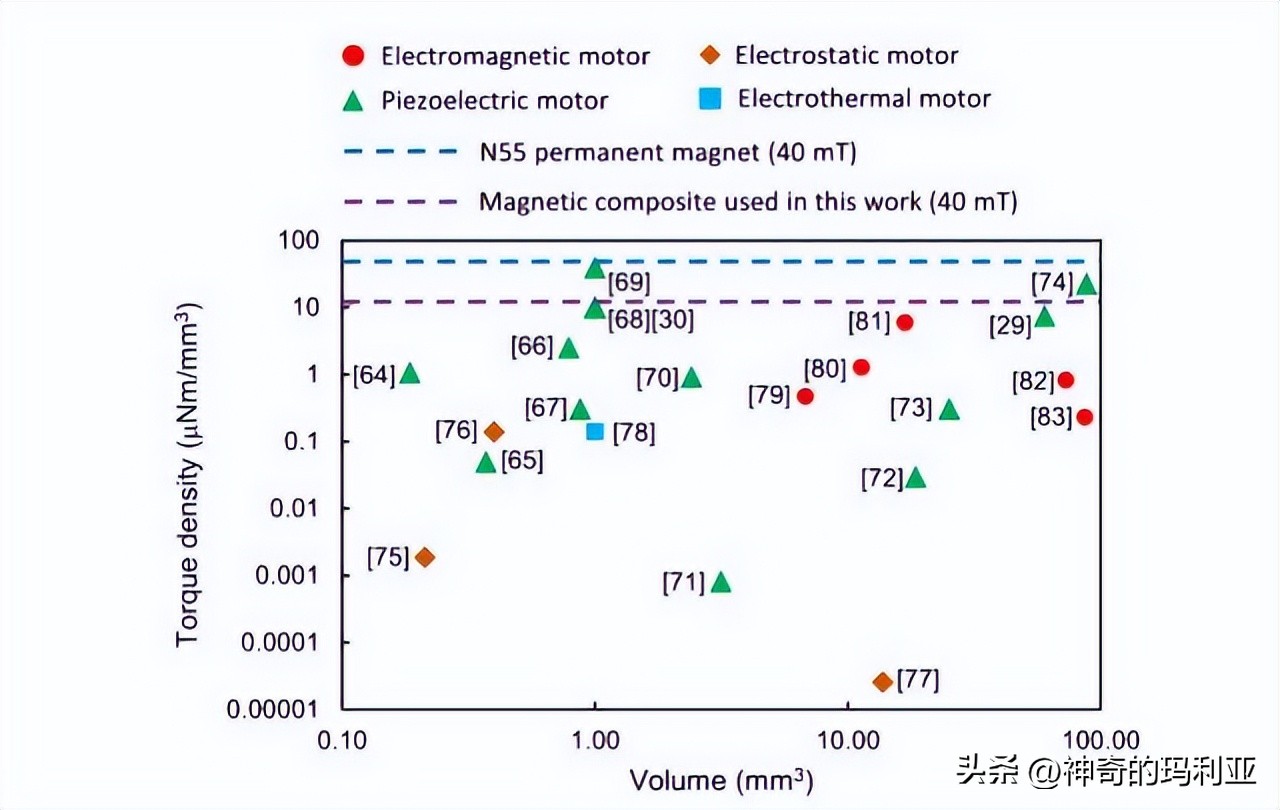
以可用磁性材料的 最大残余磁化强度 为限制,以前的研究提出了各种策略来增强外部磁场以增加磁性致动器的力和扭矩输出。
作为最直接的方法,强大的永磁体可用于产生约0.4nNm的扭矩,以在高达200mT的磁场下驱动单个柔性锥形脚,驱动多腿软微型机器人的运动。
这种方法需要将磁铁放置在非常靠近机器人的位置,以实现相当高的磁场强度,限制了其在机器人远离磁场源的情况下的应用,例如控制人体深处的微型机器人。
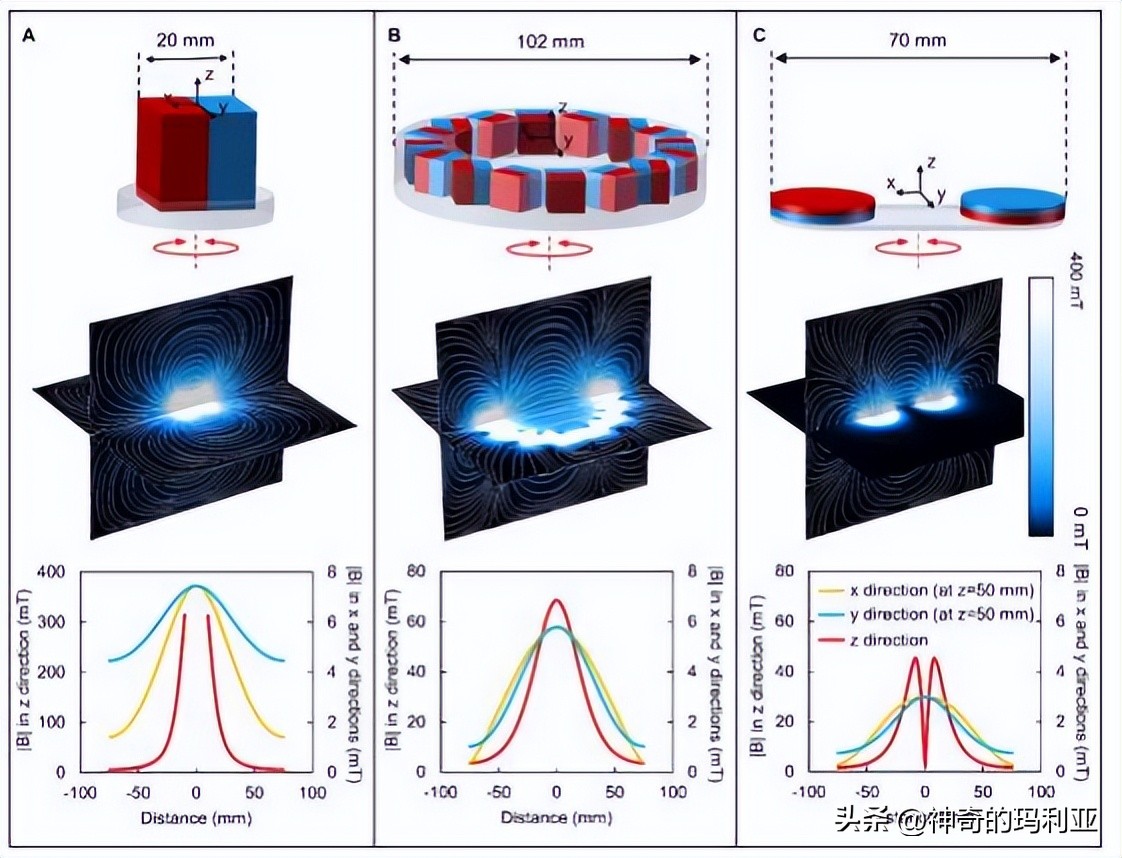
永磁体还可以排列成不同的图案,以获得高磁场梯度,磁拉力为数十毫牛顿,通过这种方法获得的工作空间仅限于厘米尺度,简单地放大设计会降低磁场强度。
对于电磁驱动系统,推动电磁铁的电流限制可以增加最大可能的磁场强度,这可能比永磁体可以产生的磁场强度大得多。
尽管磁共振成像扫描仪和高温超导磁体可以产生更强的磁场,但这些强磁场将通过预编程的磁化重新使磁性材料复磁。
除了突破外部磁场强度的极限外,通过 机械传动系统 放大磁扭矩和力输出也是一种有前途的替代方案。
齿轮系是使用最广泛的传动系统之一,用于放大施加的扭矩或力,并且已在各种片上应用的许多微系统中实现。
这些优点促使我们开发用于磁驱动移动微型机器人的微型齿轮箱,以实现更好的运动能力和不同的机器人功能。
尽管微型齿轮箱已用于由电动机驱动的微型机器人,但 集成车载电源 的困难阻止了这些机器人的无线。
我们预计,通过结合磁致动和微型齿轮箱,与其他微型旋转致动器相比,由于磁性致动器的无线特性和高扭矩密度,毫米级机器人设计将有更大的机会。
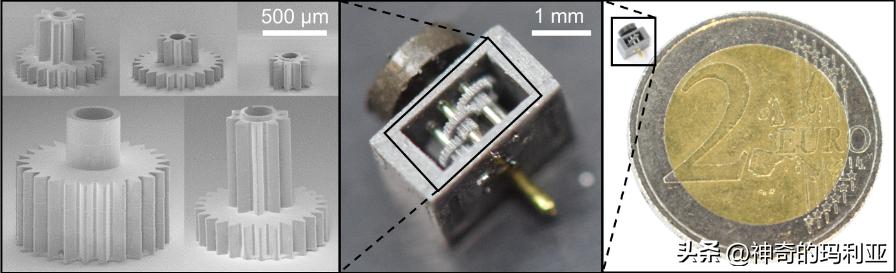
在这里,我们提出了一系列毫米级磁致动齿轮箱,质量低至13.2毫克,最大尺寸为3毫米,减速比高达342毫米级机器人。
它可以在强度小于0.182mT的0Hz旋转磁场下产生134.40mNm的输出扭矩和6.8mW的输出功率。
结合不同的功能模块,齿轮箱可以 无线驱动 ,反复产生较大的驱动力、应变和速度,将能量储存在弹性部件中,并锁定机械连杆。
用于无线驱动磁致动的微型齿轮箱
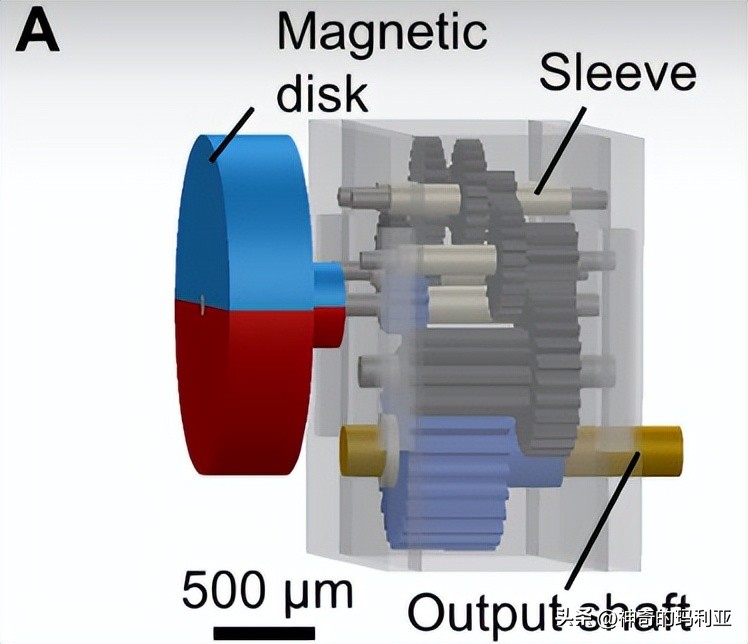
变速箱的设计在“变速箱设计”部分中进行了描述,这种平行轴齿轮系设计由五个组件组成:齿轮、套筒、轴、板和铁磁盘。
变速箱中包含七个齿轮,尺寸为2.5mmx3mmx1.5mm,以产生342的减速比,输入齿轮和输出齿轮是单齿轮,分别固定在输入轴和输出轴上。
其他齿轮是双工齿轮,可以在轴上自由滑动和旋转,磁盘固定在输入轴上,为变速箱供电,齿轮的轴向位置由套筒约束,以避免脱离或干扰。
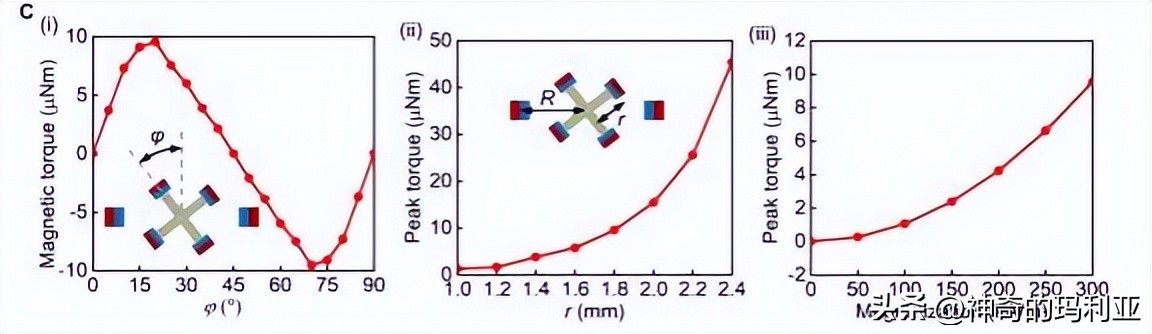
当施加外部旋转磁场B时,磁盘可以随着旋转B旋转,并向变速箱产生输入扭矩,齿轮系放大了输入扭矩,并通过输出轴 驱动负载 ,输出轴的旋转方向可以通过改变旋转B的方向来控制。
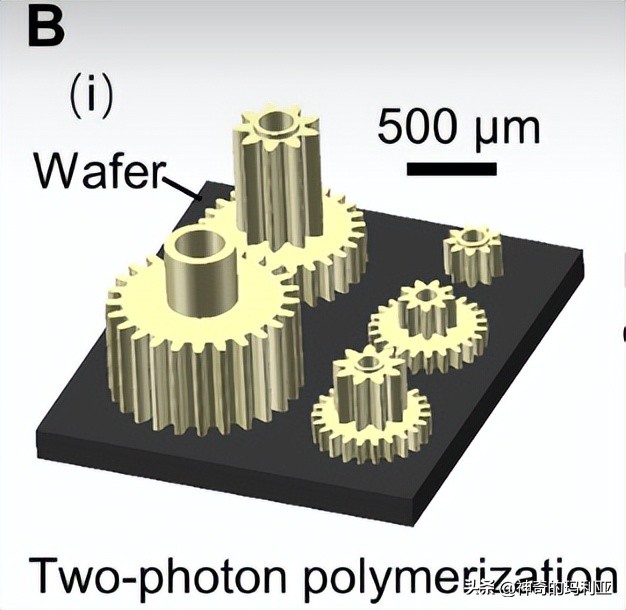
齿轮箱的所有部件,均由基于双光子聚合的三维微缩印刷系统或铸造制造,这种方法可以制造亚毫米级的齿轮。
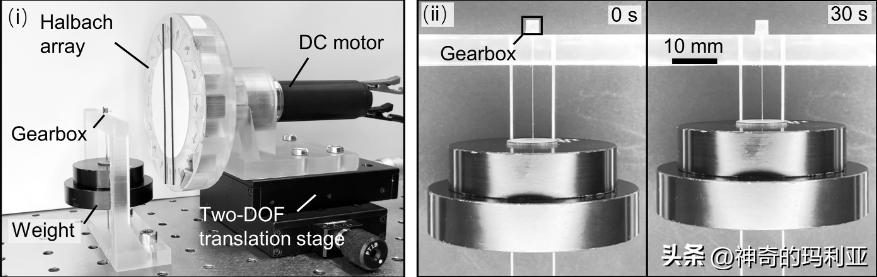
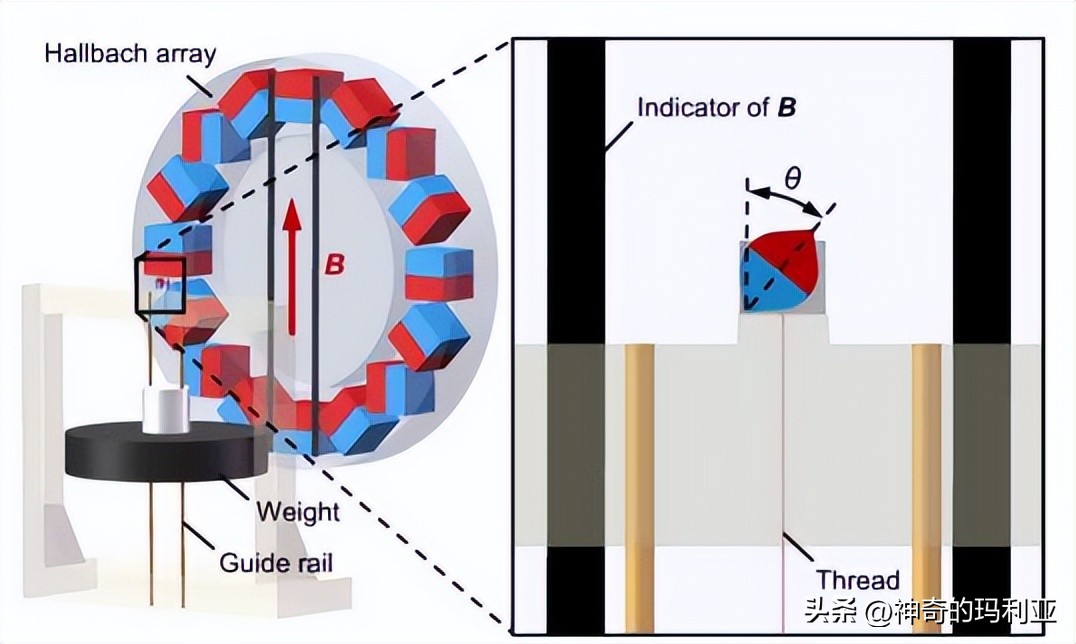
变速箱的性能通过举重实验进行了测试,旋转的B由圆柱形Halbach阵列产生,通过调整变速箱和 哈尔巴赫阵列 之间的距离来调整磁场强度。当使用强度为103.2mT的40Hz旋转B提升6.8g重物时,微型变速箱产生的输出扭矩为0.182mNm,输出功率为0.134mW。
相当于扭矩密度为12.15μNm/mm3功率密度为8.93μW/mm3,经过进一步计算出输入磁转矩为1.85μNm,输入功率为0.465mW,传动效率为28.8%。

在没有外部磁场的情况下,齿轮箱可以承受作用在输出轴上的高达0.13mNm的负载扭矩,较大的负载扭矩将导致变速箱的反向驱动。
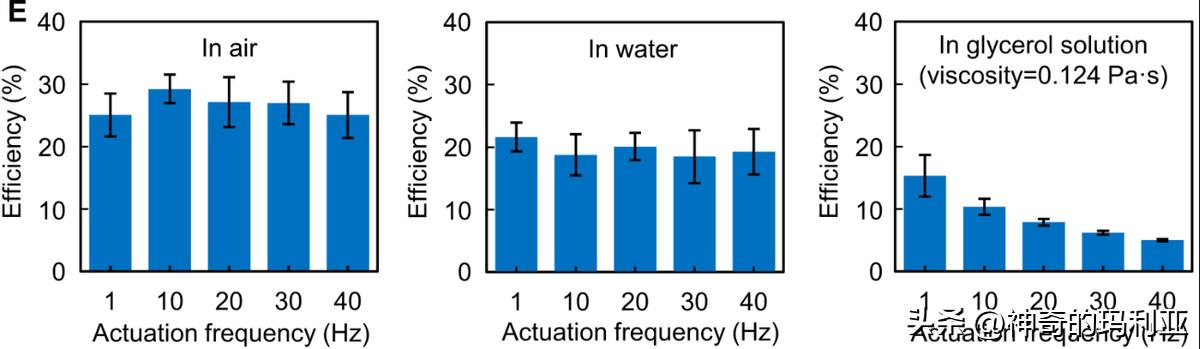
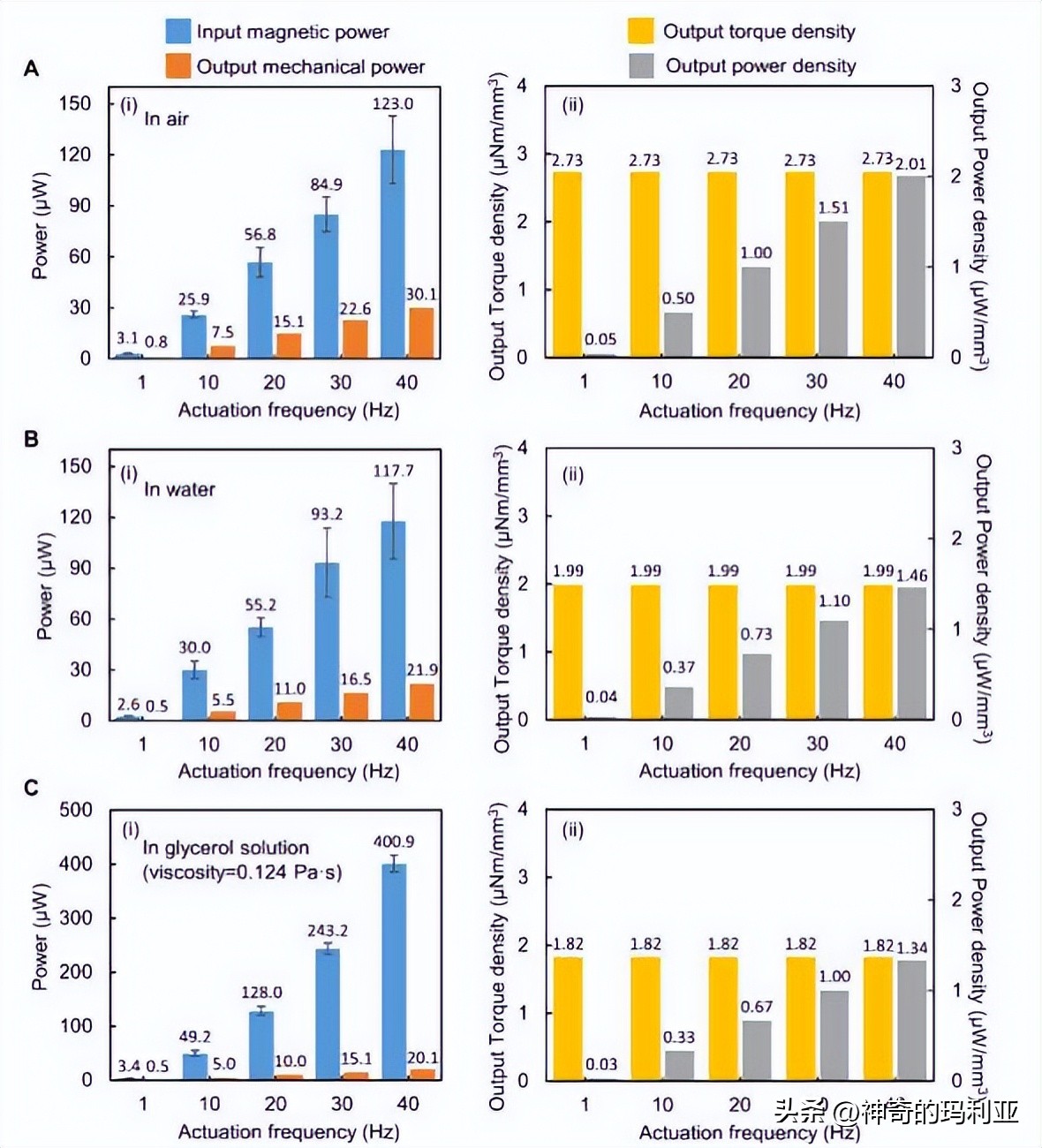
齿轮箱效率在空气中约为27%,当齿轮箱浸没在水和水甘油溶液中时会降低,其他性能指标,包括输入磁功率、输出机械功率、扭矩密度和功率密度。

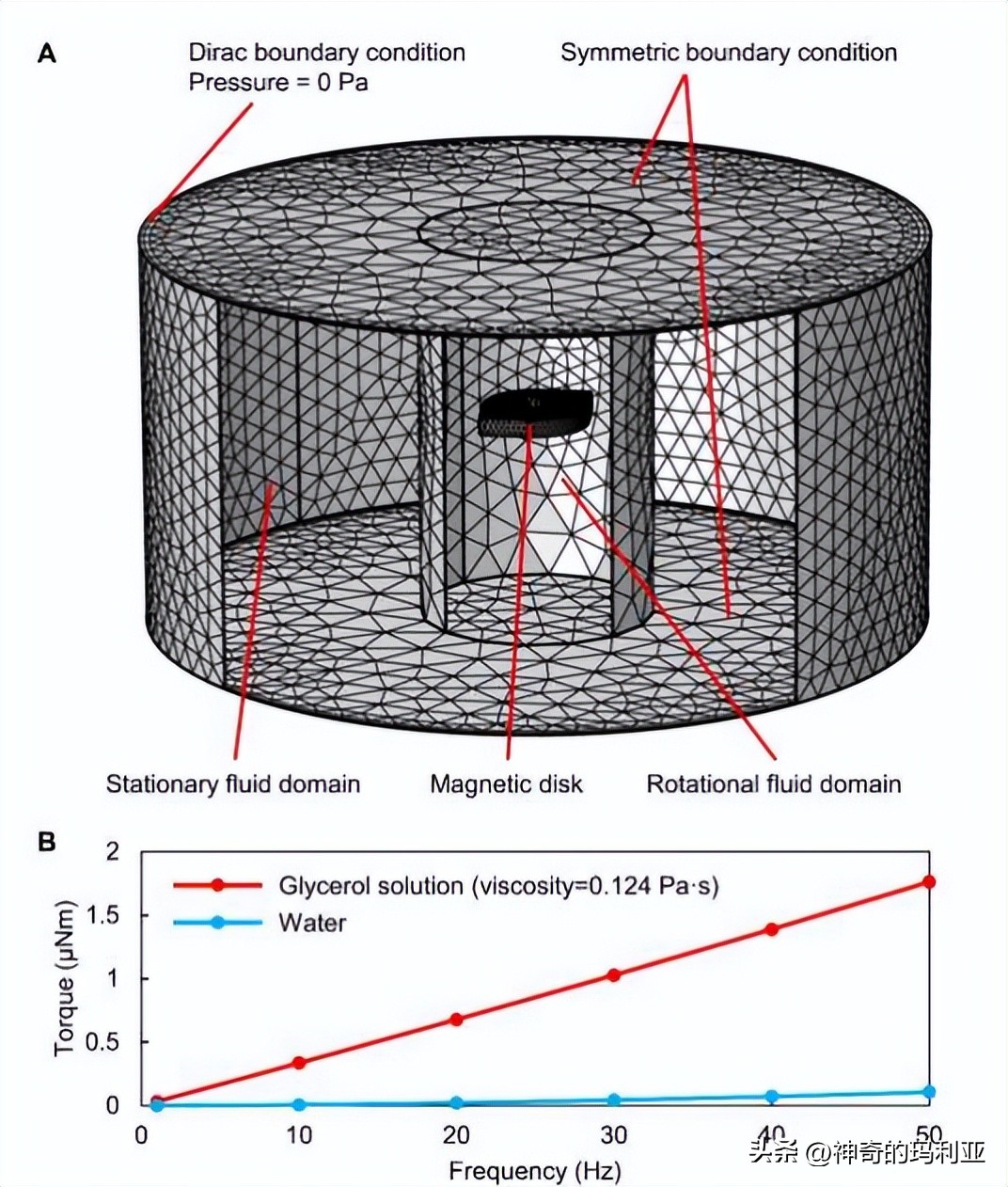
传输效率不随空气和水中驱动频率的变化而显着变化,在 高粘度水甘油溶液 中,它随着驱动频率的增加而降低,主要是由于作用在快速旋转磁盘上的流体阻力扭矩。
仿真表明,在1Hz旋转B时,水甘油溶液中的流体阻力扭矩可以达到45.40μNm,比在水中测量的扭矩高20倍。
导致液体中传输效率低于空气中的另一个可能因素,是小气泡不可避免地被困在小间隙中,这些气泡可以引起毛细管力,阻碍可移动部件的运动。
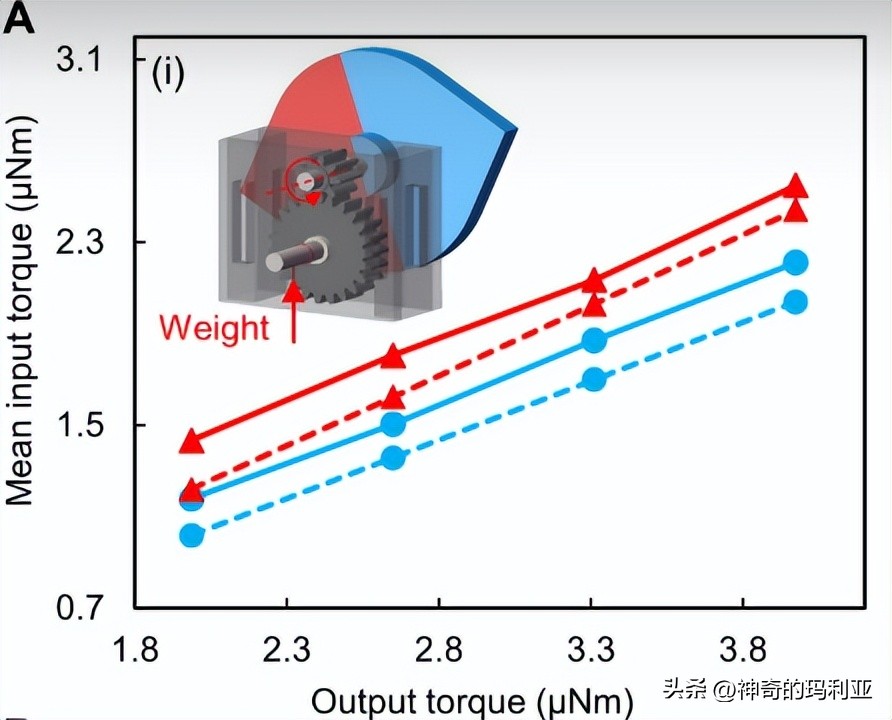
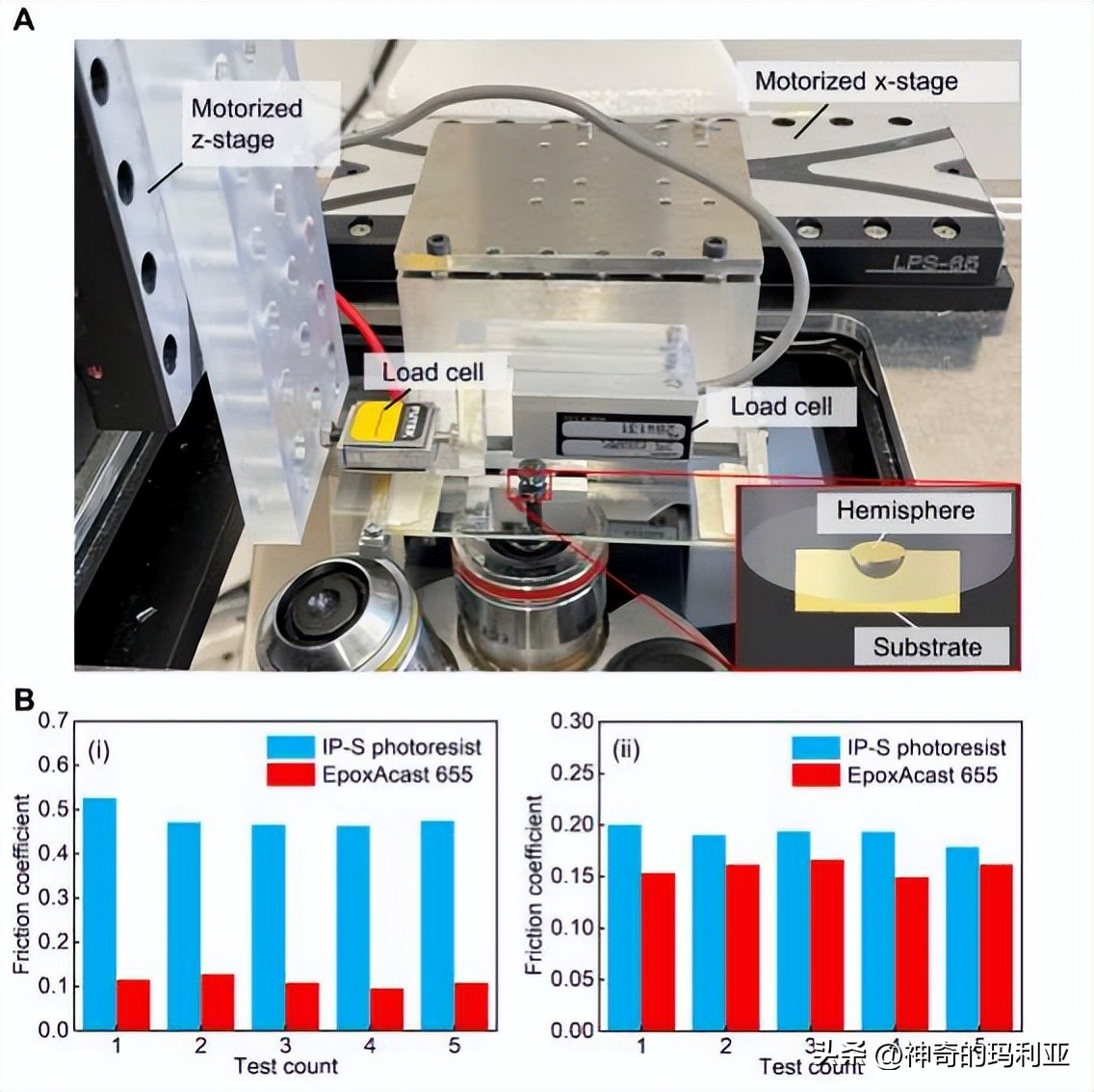
它与变速箱表征具有相同的实验设置,应用1赫兹旋转B来提升连接到输出轴的不同重物,不同齿轮材料的摩擦系数是通过实验确定的。
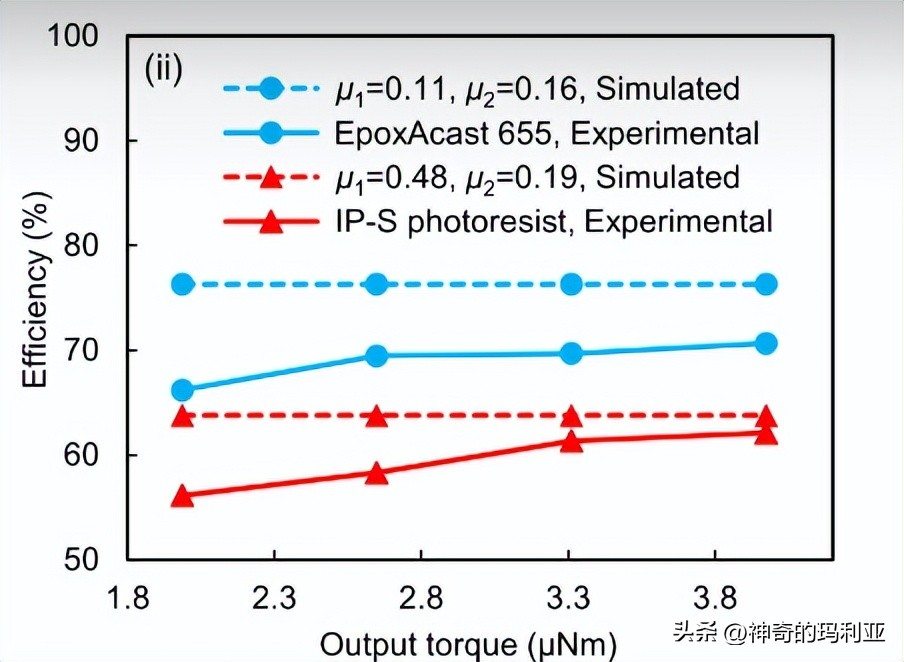
铝填充环氧树脂的实验数据比模拟数据低31.0至36.655μNm,负色调光刻胶的实验数据低0.23至0.33μNm,EpoxAcast5的透射效率也比模拟实验低6.10%至1.655%,IP-S光刻胶的透射效率低1.7%至7.6%。
不同输出转矩下模拟传动效率变化不明显,而实验计算出的传动效率随着输出转矩的增加逐渐增大并接近仿真值。
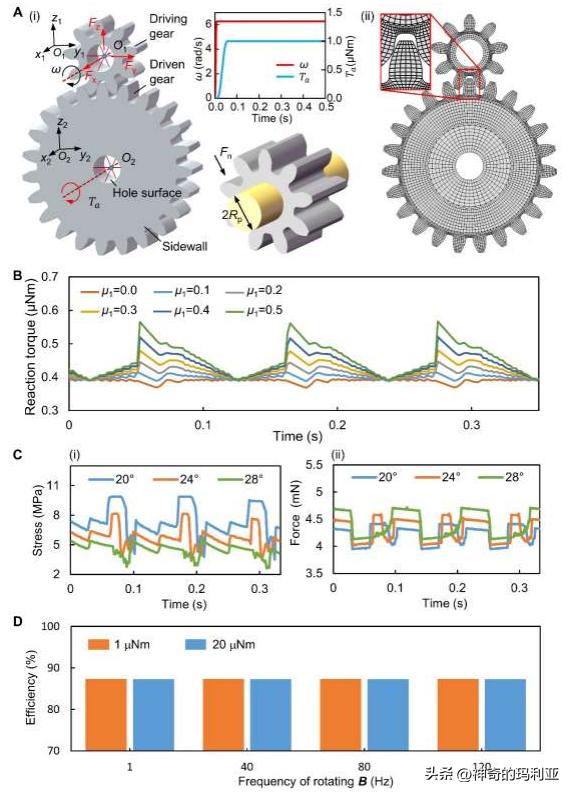
摩擦导致了实验数据和模拟数据之间的差异,在这个仿真模型中,我们考虑了两个模数为0.03、齿数为9和23的正齿轮。
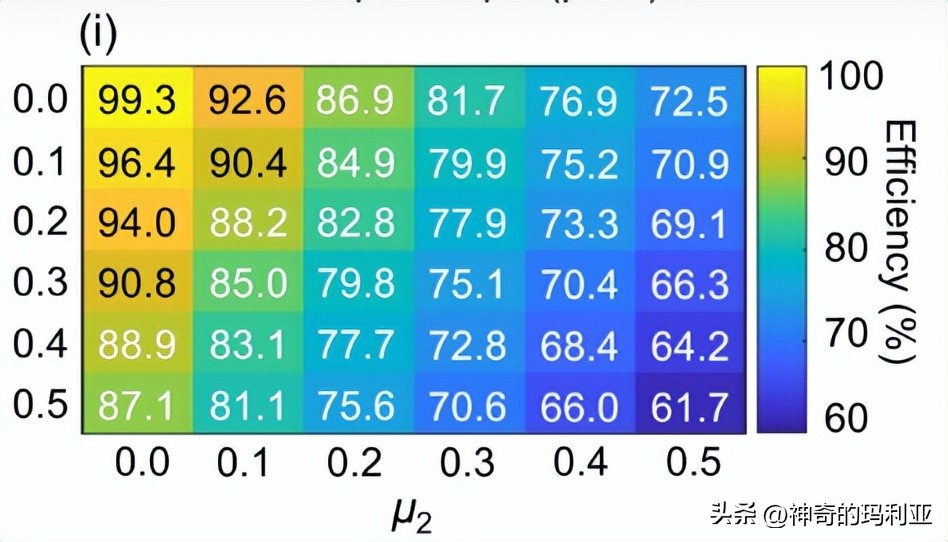
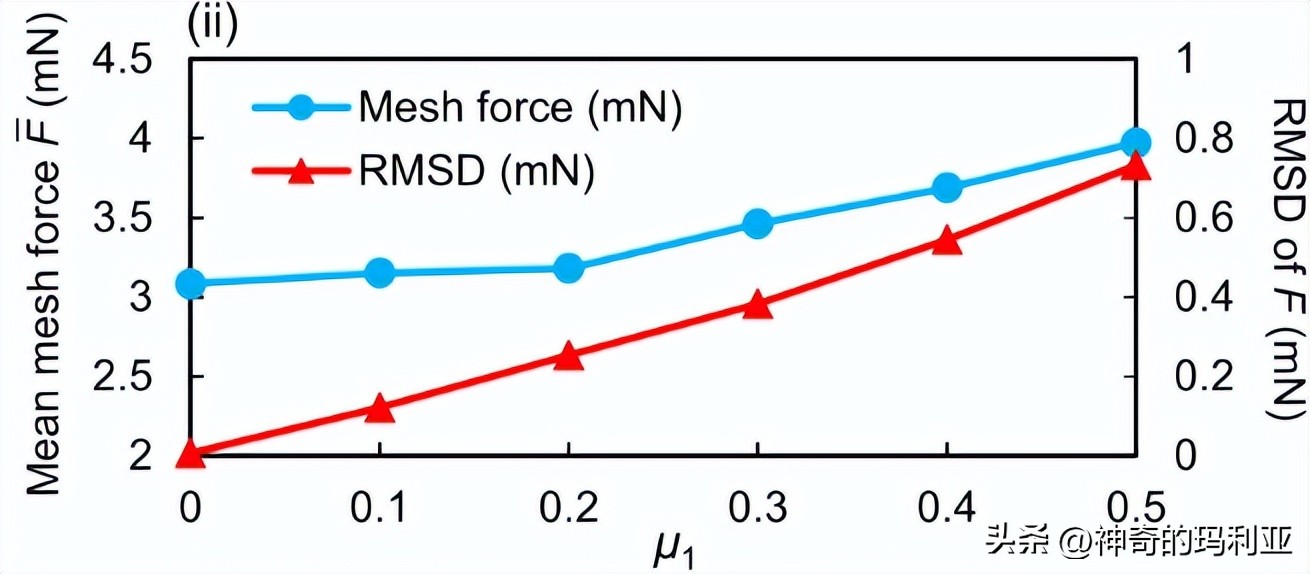
齿轮齿之间以及轴与孔之间的摩擦被认为是库仑摩擦,摩擦系数为μ1和μ2分别,轴与孔之间的摩擦对传动效率的不利影响大于齿轮齿之间的摩擦。
齿轮齿之间的摩擦也影响了F的 齿轮啮合力 和均方根偏差,F的RMSD表示可能导致齿轮箱振动和冲击载荷的啮合力振荡程度。
为了减少轴和孔之间的摩擦,我们设计了齿轮上孔的直径略大于轴的直径,用于制造齿轮的铝填充环氧树脂具有低摩擦系数,有利于减少齿轮齿之间的摩擦。
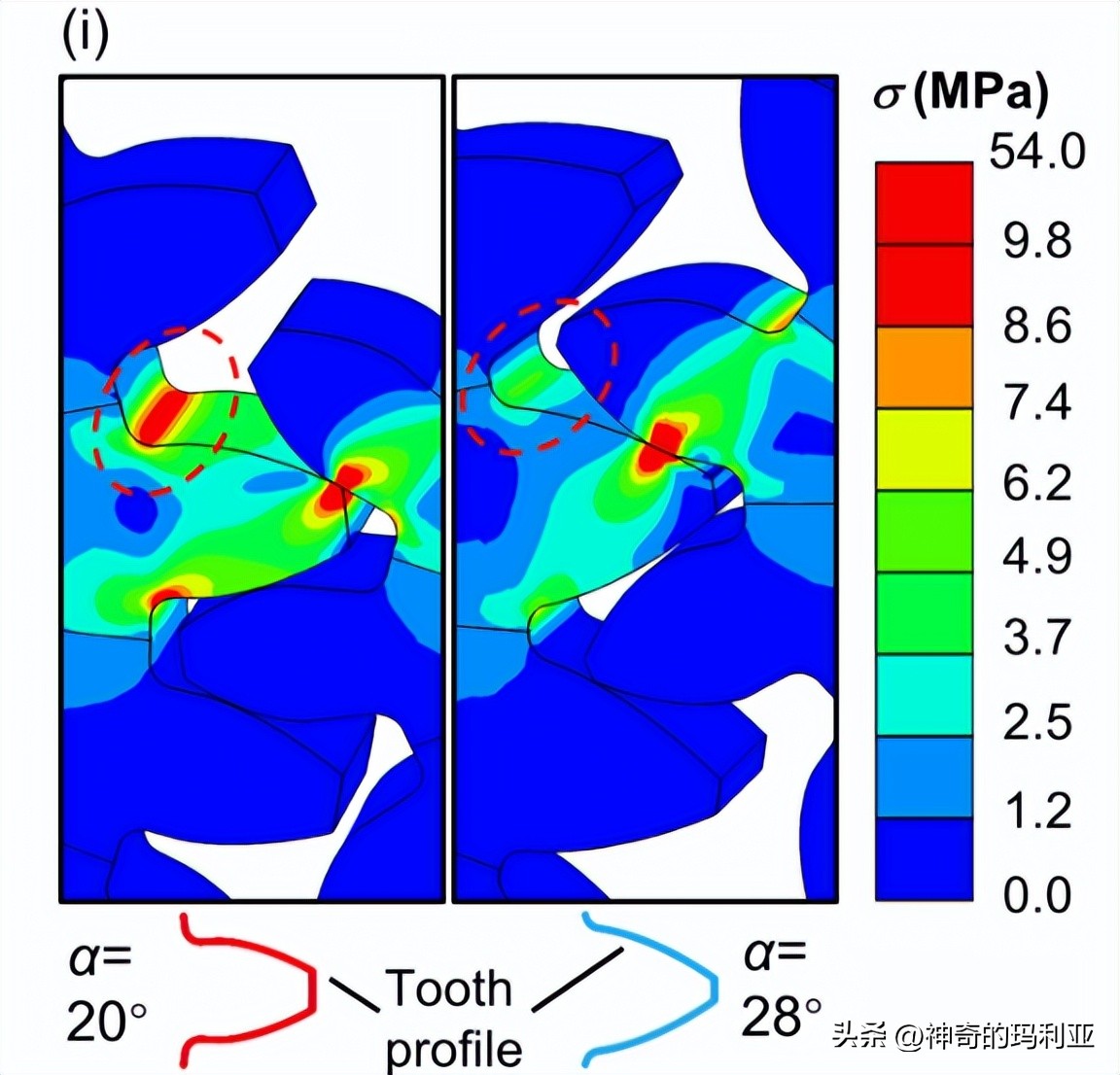
在实验过程中,齿轮箱最常见的失效模式是齿轮齿根断裂,解决办法就是增加压力角,在齿轮设计的第一个版本中,压力角被选择为20°,这在工业中被广泛采用。
这样的压力角仅实现了0.113mNm的最大输出扭矩,通过将压力角增加到28°,实现0.182mNm的最大输出扭矩,而不会损坏齿轮。
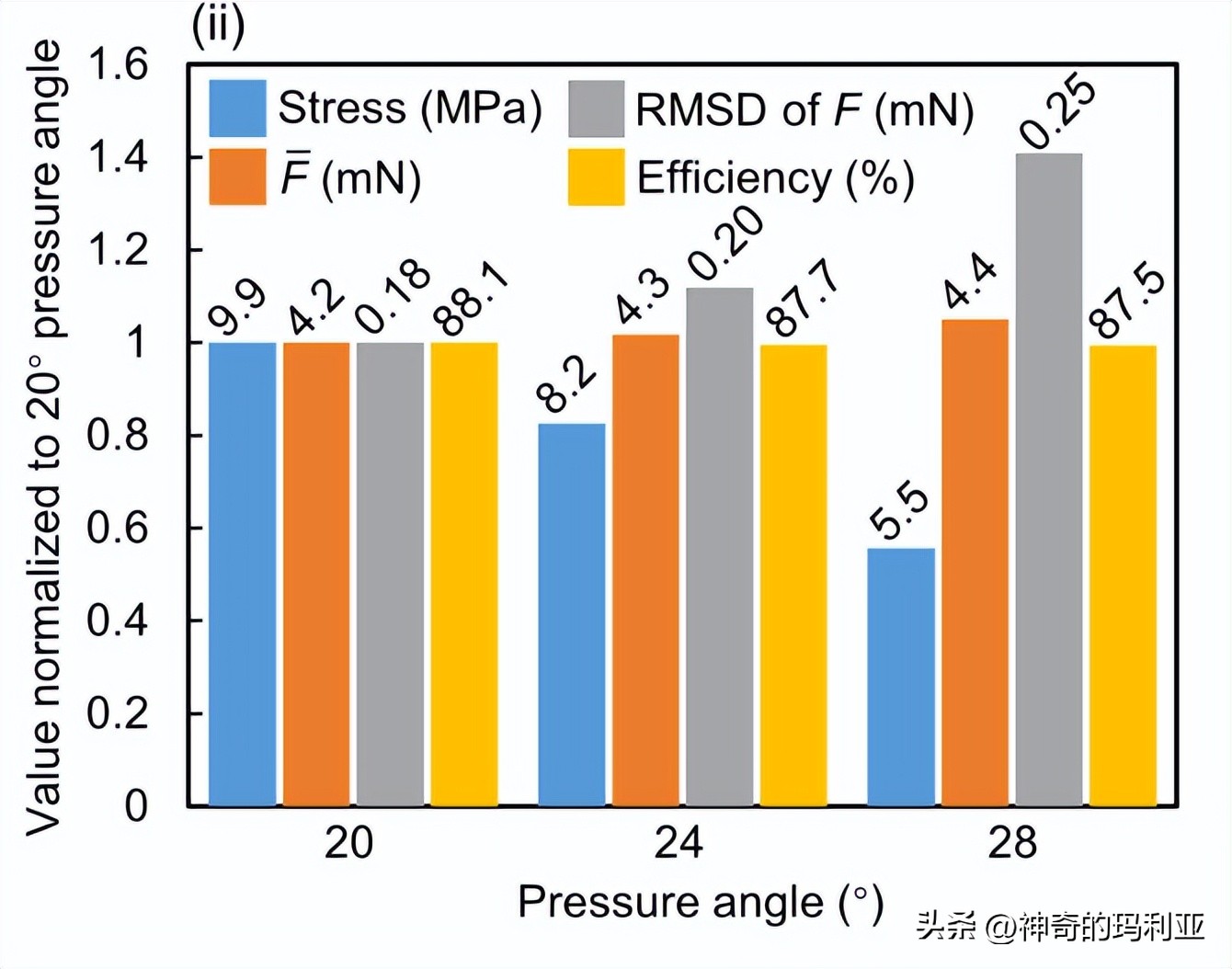
大压力角可使齿根张紧侧的最大弯曲应力降低44%,增强了齿轮箱的承载能力,将压力角从20°增加到28°仅导致传输效率略有降低,F略有增加。
然而F的RMSD明显增加了39%,各种采样机器人中使用的齿轮箱的压力角设置为20°,以减少不希望的振动。
除了压力角之外,增加给定齿轮的模块是提高齿轮强度的另一种可能解决方案,模块越大,齿根宽度越大,可以传递的扭矩就越高。
无线变速箱控制的蠕动机器人
磁致动微型齿轮箱可以实现以前的无线微型机器人无法实现的运动模式,一个典型的例子是受蚯蚓启发的蠕动运动,蠕动运动已经通过许多不同的方法实现。
在厘米或更大的尺度上,它通过使用异质磁场,气动执行器,电动机,电磁执行器和形状记忆合金执行器,将这些设计缩小到毫米甚至更小的尺寸以实现移动无线机器人是非常具有挑战性的。
对于由异质磁场驱动的机器人来说,挑战来自于在高空间分辨率下实现空间异质B场的困难。
由电动机、气动执行器、电磁执行器和形状记忆合金执行器驱动的机器人需要机载电源、电线和空气管路,而微型机器人的机载空间有限,首选无线驱动策略。
在毫米或更小的尺度上,蠕动运动是通过水凝胶或液晶弹性体致动器实现的,为了驱动这些机器人,我们使用扫描激光束以扫描方式加热材料以产生行进蠕动波,这种驱动策略有两个缺点。
光驱动机器人仍然被光束束缚,这阻止了机器人在对给定光波长不透明的环境中运行,加热的驱动速度受到加热和 冷却速率 的限制,导致运动速度变慢。
对于由均匀磁场控制的微型机器人来说,周期性地产生这种波状的身体收缩和膨胀变得更加具有挑战性,因为相邻的身体段必须以不同的方式响应相同的控制输入。
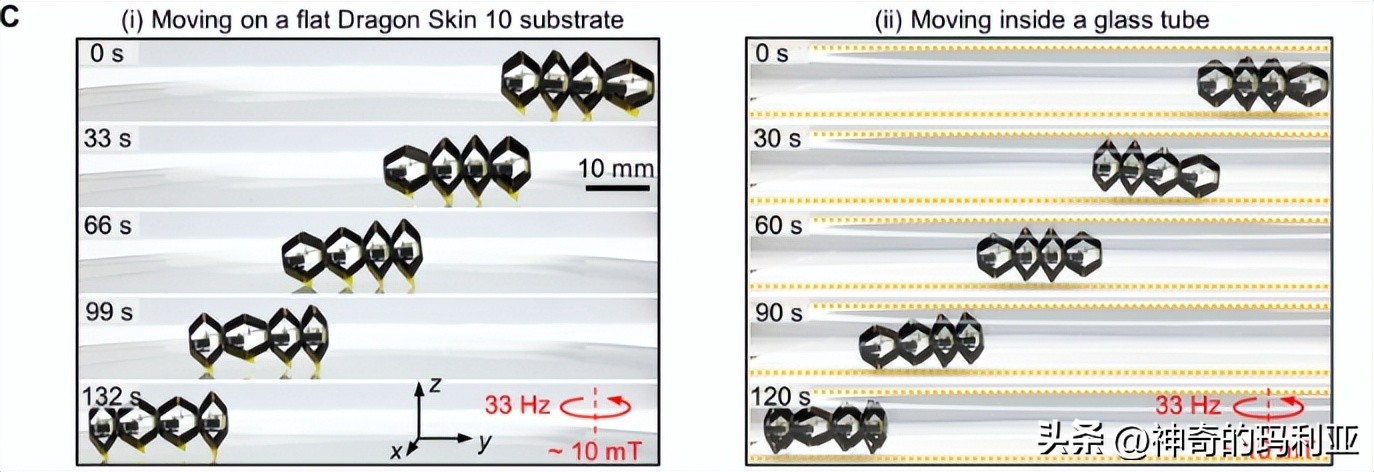
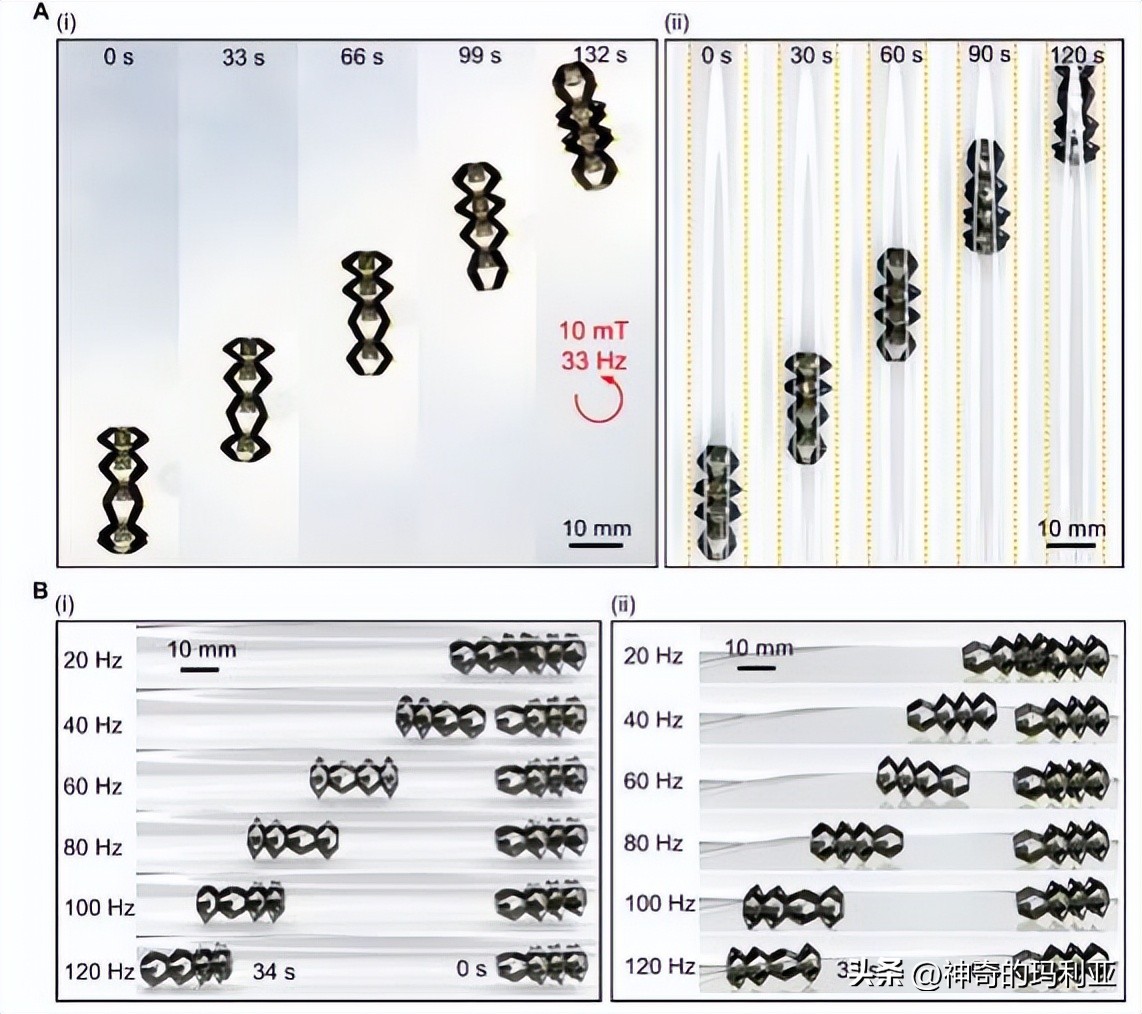
在这方面,我们证明了通过使用变速箱,可以开发一种受蚯蚓启发的蠕动微型机器人,所提出的机器人有四个段,每个段都可以在外部旋转B下有节奏地收缩和扩展,以沿机器人本体传播蠕动波。
每个段的主体框架是一个四面Sarrus连杆,可以通过直线运动产生圆周膨胀或收缩,为了驱动这种直线运动,我们使用两杆连杆连接变速箱的输出轴和Sarrus连杆的一端。
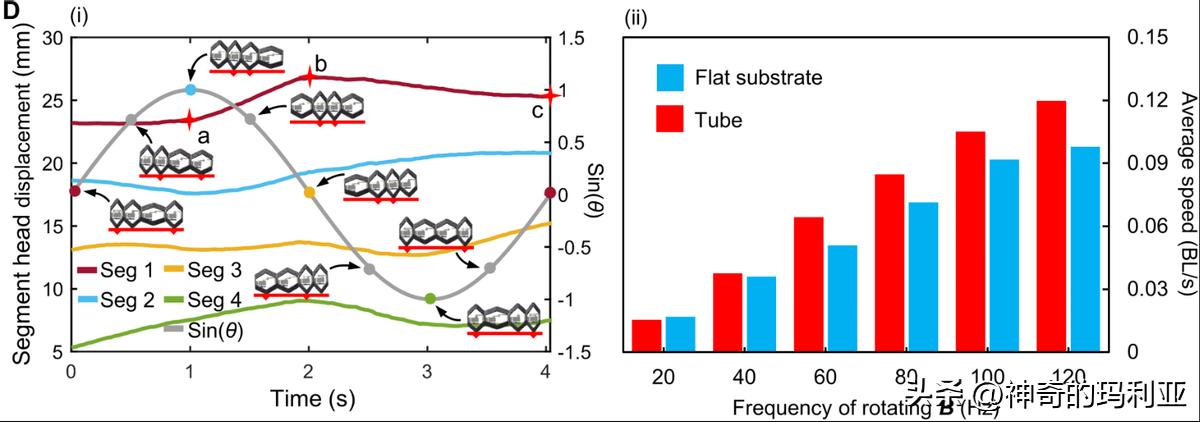
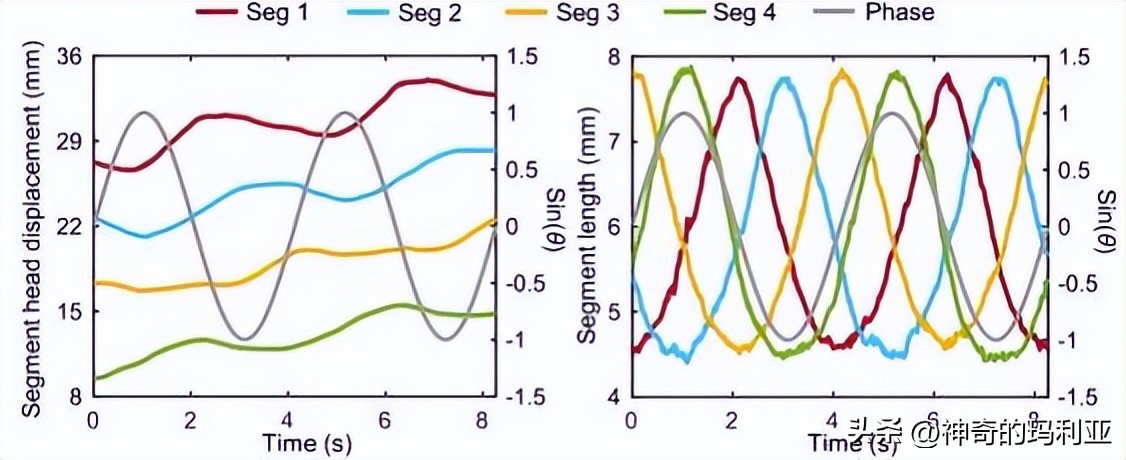
旋转的B有节奏地改变角度θ,引起每个体段的收缩和膨胀,当θ为0°时,机器人框架完全收缩。
在这种状态下,轴1和2的长度分别为4.4和11.7mm,随着θ的增加,轴1的长度增加,轴2的长度减小,框架的完全膨胀在θ=180°处达到。
在此状态下,轴1和2的长度分别为7.8和8.4mm,当θ从0°到360°变化时,该段完成了膨胀、收缩循环,从第一段到第四段的初始θ分别为0°、270°、180°和90°。
当应用全局旋转B时,变速箱以相同的速度驱动其输出连杆,所以保持了相邻段之间的相位差,并沿机器人长度创建了行波。
在驱动过程中,机器人的长度几乎保持不变,当时两个相邻段之间的初始θ之差为90°,蠕动机器人的运动能力首先在平坦的龙皮10基板上进行了测试。
平行于基板的平面中旋转的33赫兹B由两个反对称放置的 永磁体 产生,在基板中心测得的最大∣B∣约为15mT。
为了增加机器人和基板之间的摩擦,我们在机器人身体上安装了四对昆虫脚状聚酰亚胺切片。在上述实验条件下,机器人在68s内以7.132mm/s的平均速度在基板上移动了0.52mm。
相邻段之间的相位差在运动前后是恒定的,表明所有变速箱都正常工作,在运动过程中,由于旋转B,机器人和基板之间的摩擦限制了大部分身体旋转,在12-s运动期间观察到的偏航角仅为5.132°。
通过在平面基板上施加与运动相同的B,机器人在81秒内以5.120mm/s的平均速度移动了0.68mm,这比在平面基板上更快。
一个原因可能是管壁的存在将机器人运动限制在一个维度上,消除了身体旋转并提高了由此产生的速度,机器人的前向运动是通过交替锚定在基板上并拉长身体来产生的。
要实现一个段的向前移动,必须满足以下两个要求,这个向前发展的细分市场正在扩大,至少有一个其他段锚定在基板上。
无线变速箱控制的跳跃机器人
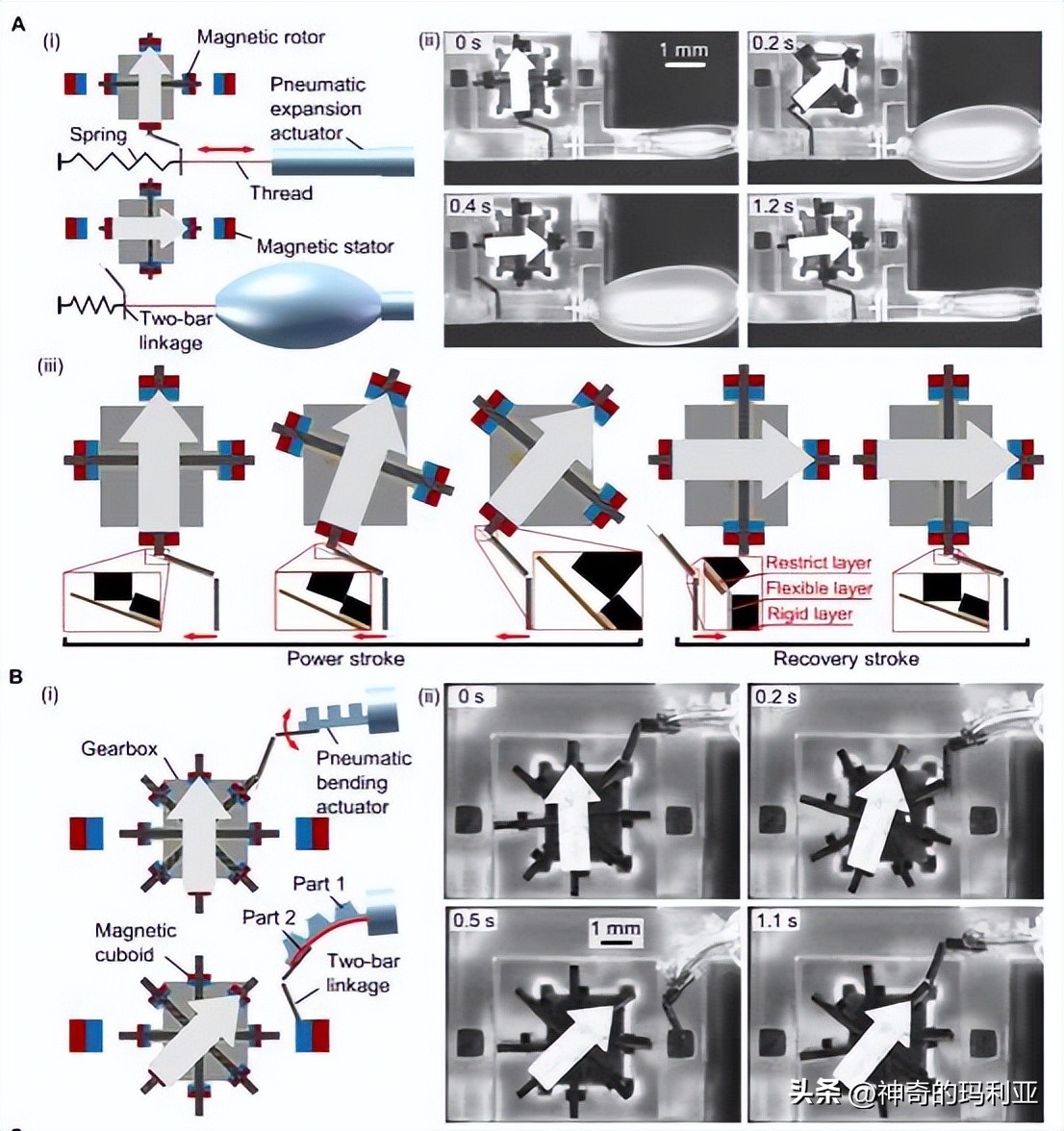
实现高性能跳跃的解决本番多数是尽可能减小机器人的尺寸和质量,同时仍然能够存储大量的机械能,阻止正在预加载的机构,并快速触发能量释放。
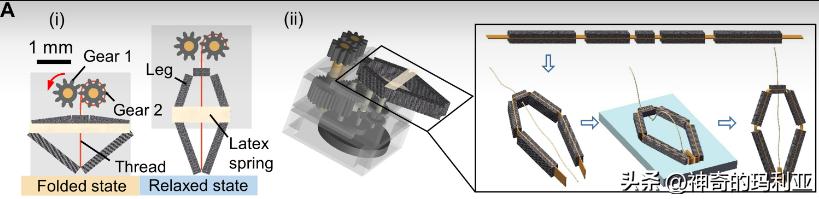
受跳蚤和蛙蝉等微型跳跃昆虫的启发,我们提出了一种毫米级的跳跃机器人,该机器人具有平行弹性腿。
机器人腿是一个五杆连杆,与乳胶弹簧并联,通过拉动连接到脚的线,腿缩回,弹簧拉长。通过在腿完全缩回后松开线,释放弹簧中储存的弹性能以快速伸展腿。
拉动和松开的运动由一对齿轮实现,其中一个齿轮有两个缺失的齿,并固定在输出轴上,螺纹连接到另一个具有完整齿的齿轮上。
当这两个齿轮正常啮合时,齿轮2将拉动螺纹以缩回腿或将腿保持在当前位置,齿轮1将充当闩锁。
如果要啮合的齿丢失,齿轮将突然松开螺纹并自由旋转,这种跳跃机制允许机器人反复跳跃。
通过在不同阶段施加适当的外部磁场,机器人能够完成一个跳跃周期——包括储能前的姿态调整、能量储存、触发前的姿态调整以及跳跃的最终触发。
即使去除外部磁场,机器人也能够保持弹簧拉伸,因为变速箱的减速比足够高,内部摩擦足以防止齿轮反向旋转。
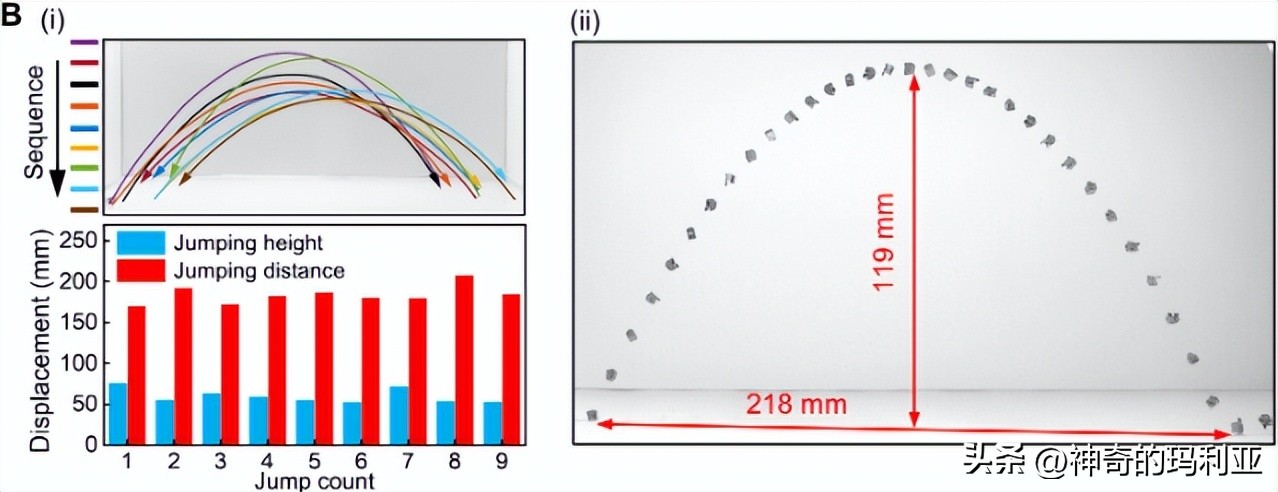
我们在重复跳跃实验中连续来回跳跃11次,以测试变速箱和跳跃机构的可靠性,检查了4次未撞壁的跳跃的高度和水平距离,发现机器人的跳跃性能稳定。
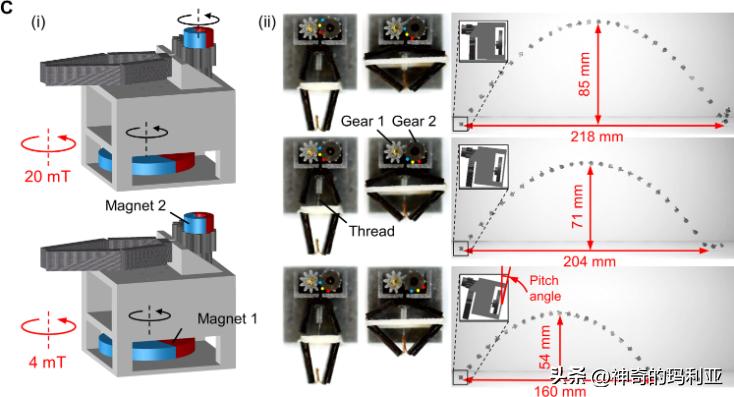
为了突破跳跃性能的极限,机器人配备了一个非常坚硬的乳胶弹簧,并在刚性基板上跳跃,触发后,25.2毫克机器人能够在0.75毫秒内快速伸展腿部,达到2.3米/秒的起飞速度,获得0.067毫焦的动能。
它的跳跃高度高达119毫米,水平位移高达218毫米,可以实现显着的水平位移,因为我们从机器人身体的质心偏移了腿连杆的平面。
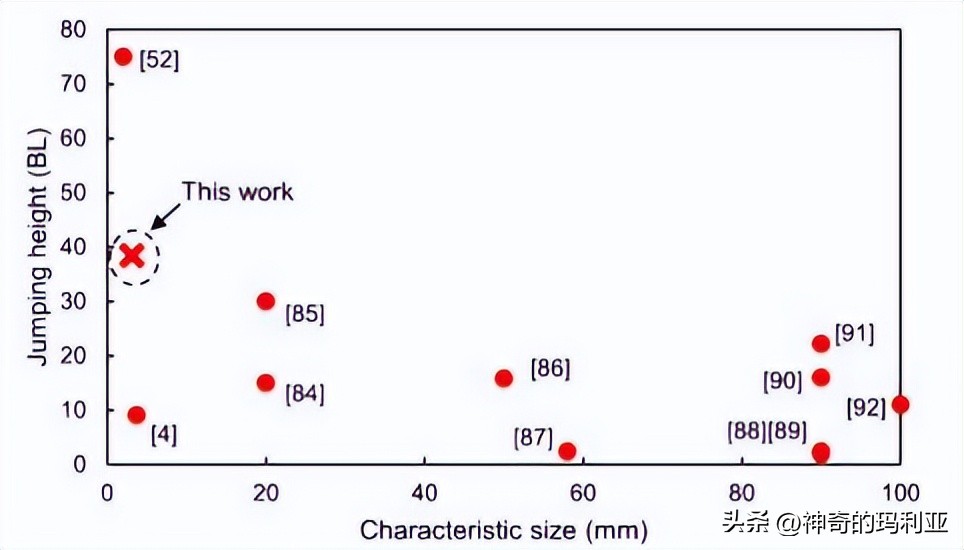
机器人的跳跃高度超过了以前研究中开发的其他毫米级跳跃机器人,除了中报道的跳跃高度达到75BL。
为了触发跳跃,必须将高达2.34W的近红外激光源,精确放置在球形水凝胶致动器附近,以局部加热0.28mm。

相比之下,磁跳机器人允许将磁源放置在很远的地方,并且可以在NIR或其他光源无法穿透的非透明环境中工作。
机器人的跳跃高度也可以通过外部磁场进行调整,为了调整跳跃高度,我们对变速箱进行了轻微修改,在齿轮2上安装了一个小磁铁。
这种小磁铁的残余磁化强度低于连接到变速箱输入轴的磁盘,因此它需要更强的B场来旋转,通过施加强大的旋转B场,以控制将要接合的齿轮齿。
由于减速比大,齿轮1只能稍微旋转,仍然允许齿轮2自由旋转,我们应用较弱的旋转B场,仅旋转磁铁1,同时保持磁铁2静止,齿轮1在所选齿处接合齿轮2,最后将腿连杆折叠到所需状态。

这种策略可以控制腿部的回缩行程,改变弹簧中储存的能量和身体俯仰角,导致不同的跳跃高度。
结论
我们在这项研究中,展示了如何使用磁致动微型齿轮箱在无线毫米级机器人上产生力放大。
齿轮箱可由不超过6.8mT的旋转外部磁场驱动,产生高达0.182mNm的输出扭矩和高达12.15μNm/mm的扭矩密度,由6.8mT磁场驱动的整个齿轮箱的转矩密度大于由40mT磁场驱动的磁性执行器的转矩密度。
齿轮箱的大减速比保证了较大的输出力,并降低了对磁场强度的要求,这有助于抑制由于磁力矩引起的刚体旋转。
大减速比 的好处是以输出转速慢为代价的,这是减速比选择的权衡,变速箱是可转向的,这可以通过施加磁拉力或磁力扭矩来实现。
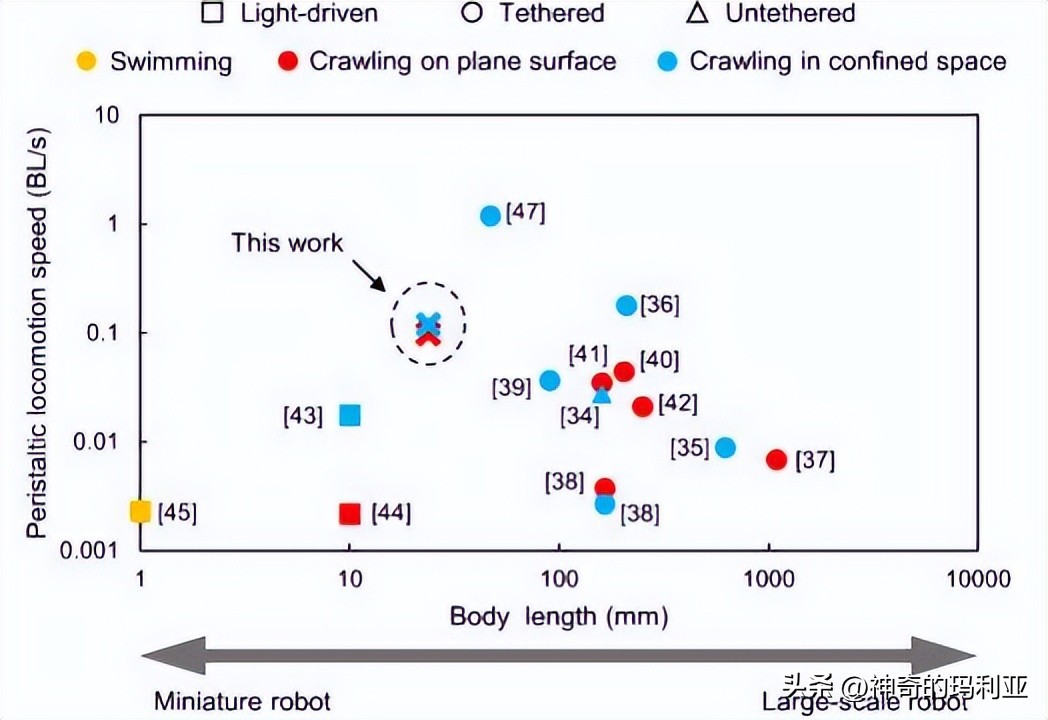
通过变速箱和功能模块的结合,我们实现了稳定的蠕动爬行,速度高达0.12BL/s;可重复、可操纵、高度可调的跳跃,最大跳跃高度为38.4BL,最大跳跃距离为70.3BL,以及可以收集固体和液体样品的各种功能机器人。

变速箱的制造需要手工装配过程,这降低了制造效率,显微操纵器等制造设备有望加快这一装配过程。