智慧侠科技小制作课堂上,每次小朋友们都很活跃,也对智能科技玩具充满了好奇。
今天就带大家认识四足机器人是如何制作的?
智慧侠目标课程:认识连杆的运动规律

连杆:是两端可以传递运动和力的杆子
四足机器人是靠连杆来传递力从而动起来。
下面就教大家如何制作四足机器人:
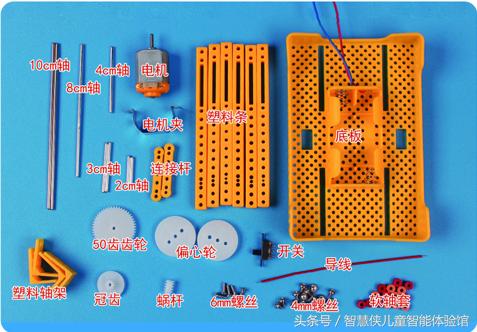
1.认识零件

2.电机上安装蜗杆后,固定在底板上
3.4CM轴安装冠齿

4.固定在底板上

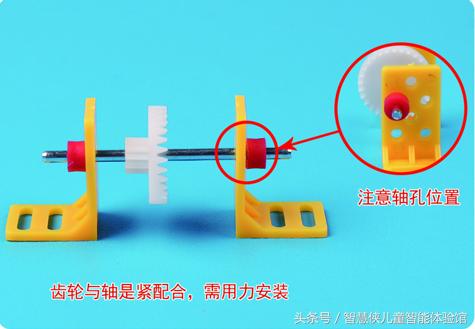
5.8CM轴上安装50齿齿轮,两端安装偏心轮

6.笃定到底板上,偏心轮小孔插上1根3CM轴,用力转动偏心轮,使两根轴一上一下(偏心轮两边的孔一大一小)

7.安装连接杆

8.安装塑料条
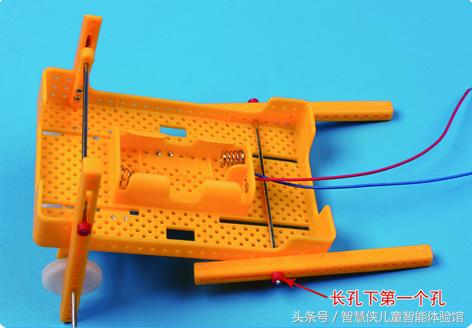
9.用10CM轴穿过底板,安装塑料条

10.用塑料条连接“前腿”和“后腿”,安装开关
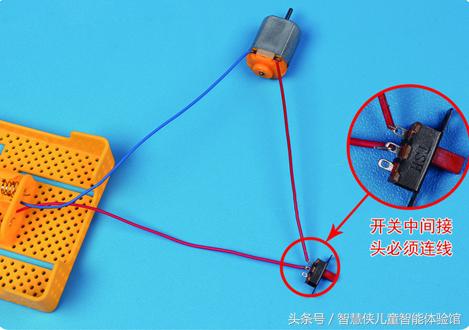
11.连线,完成
爱交流,乐分享!
你今天学到了什么呢?