
王涛,王伟,赵全军,解放军306医院,神经外科
品牌质量管理办公室编辑
21世纪,传统神经外科将是立体定向与功能神经外科的时代,手术环境也将是一个全新的、多维的立体定向概念:在计算机辅助下,综合运用生物感应技术、多模态影像融合技术、虚拟现实和医疗机器人等技术,修复或再构筑脑和神经组织的功能缺失。
立体定向手术以精准、微创为特点,可明显提高颅内病变定位成功率,显著减少病人手术创伤。目前已与功能神经外科一起成为神经外科领域的一个独立分支,即立体定向及功能神经外科。在实施传统立体定向手术时,病人均需在行影像学检查前安装立体定向框架,这一过程增加了病人的痛苦与恐惧感。另外,由于框架的遮挡,手术视野也会受到一定影响。无框架立体定向手术是指利用计算机系统辅助,通过将患者术前CT/MRI影像融合转换为三维图像,在实时摄像头辅助定位下,完成手术精准计划及路径设计,机械臂按预设坐标自动到达靶点位置,手术医生综合利用工作平台完成微创、精准、高效的操作。
解放军306医院于2015年率先引进“Remebot手术机器人”。该设备是我国自主研发的新一代神经外科手术辅助导航定位系统,目前已完成脑深部病变活检、脑深部电极置入、脑出血抽吸、开颅辅助精准导航等多例手术。

“Remebot 手术机器人 ” 关键技术
306医院神经外科应用的国产神经外科机器人导航定位系统Remebot由六自由度机械臂、主控计算机以及双目摄像头组成,无需安装定位框架。六自由度机械臂较以往扩大了手术工作区间,使手术路径设计更加方便,摄像头可自动识别标志点,避免了系统人为误差。另外,机械臂主动定位,即能节省定位时间,又提高了定位精度。
1、手术规划。手术前, 病人在清醒状态下头部粘贴四枚标志点,然后行CT或MRI扫描,将病人影像学资料输入Remebot主控计算机,完成图像融合及三维重建,追踪标记Mark点,设点手术靶点并规划手术路径。
2、手术定位。患者平卧于手术床,头部塑性枕固定,Remebot主机与手术床架固连。机械臂归零位后分别在手术区域右、左、前、后四个方位注册,然后用标定针分别对患者头部的四个标志点进行注册,实现患者图像空间与手术操作空间的相互映射。在图像空间进行手术靶点及穿刺路径的手术模拟,确认机械臂运动轨迹安全后,按手术路径启动机械臂,标记入颅点,机械臂返回消毒位,并取下定位导向器进行快速消毒。
3、手术实施。常规消毒,铺无菌巾后,按标定入颅点经手术预设路径再次启动机械臂,到达手术位姿后,套上无菌罩 安装消毒好的定位导向器,再次确认入颅点准确无误后,切开入颅点头皮1.0 cm,经皮颅骨钻2.5 mm直径骨孔,依据病变类型及手术方式完成后续操作。
请输入图片描述
手术适应症和技术优势
Remebot机器人可广泛应用于脑内病变活检、脑出血、帕金森、癫痫等十二类近百种神经外科手术。
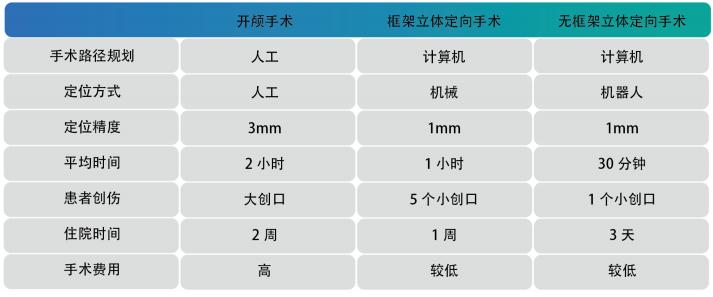
相比于传统开颅或带框架立体定向手术,机器人辅助无框架立体定向技术具有以下几点优势:(1)标志点小巧灵活,不会引起患者任何不适;简化操作流程,减少术前、术中操作时间;(2)减少侵入性,将患者的创伤、手术风险和痛苦减至最低,特别适用于儿童或颅骨较薄者;(3)定位精准,不受框架自身误差和安装框架误差的限制;定位范围大,手术入路不受限制;(4)自动实时定位和导向功能,无需医生自行计算;(5)无全麻要求。
【学科专家简介】
解放军第306医院神经外科为我国较早开展立体定向和脑功能性疾病诊治的科室,在立体定向外科治疗和功能神经外科领域积累了丰富的临床经验。科室目前已配套包括立体定向手术框架、立体定向导航等装置,核磁引导下立体定向精准手术设计软件系统,立体定向脑深部核团毁损设备以及颅内深部电极、皮层电极探测装置等硬件设施。同时医院相关科室的技术装备已可满足脑功能性疾病患者术前评估、定位和手术计划设计的要求,包括能够完成长程脑电图的监测和视频监测的神经电生理设备;具有头颅MRI和PET设备,并能够完成头颅海马像的特殊成像要求。在完成上述检查的基础上,同时可开展脑磁图(MEG)、磁共振波谱(MRS)、功能性磁共振(fMRI)等技术的临床研究与应用。
赵全军,主任医师,医学博士,硕士研究生导师,国务院政府特殊津贴获得者。解放军306医院立体定向及脑功能性疾病诊治中心主任,神经外科主任医师,现任中国抗癫痫协会理事,北京抗癫痫协会理事。1995年赴奥地利维也纳大学附属维也纳总医院神经外科学习,2011年赴美国克利夫兰癫痫中心和梅奥医院神经外科进修学习。主要研究方向:难治性癫痫的外科治疗,并配合进行了手术前后的神经心理学分析,取得初步成果;脑功能性疾病的外科治疗,包括脑深部微电击刺激(DBS)治疗帕金森、扭转痉挛、舞蹈症等运动障碍性疾病;机器人辅助无框架定位脑手术的研究与临床应用,参加了医用外科手术机器人系统的研制与临床应用研究,其系列成果获北京市科技进步二等奖、*队军**科技进步二等奖。