
文丨聆听娱纪
编辑丨聆听娱纪
介绍
最近对环保、高效的交通技术的需求 ,加上气候变化对汽车行业施加的相关规定,正在推动减少二氧化碳(CO2)和提高汽车燃油效率的研究。实现这些的最具代表性的方法是缩小引擎的尺寸。
发动机小型化是一种减少发动机排量以防止燃油浪费的方法。为了弥补由此产生的性能不足,大量的新鲜空气被强迫通过发动机使用涡轮增压器或增压器被称为强迫感应系统(FIS)。其效果与增加排气能力类似。

大约110年前,瑞士工程师阿尔弗雷德·比奇发明了一种涡轮增压器,它可以再利用废气来驱动涡轮机。由于它必须伴随着极端的热控制技术和高发动机耐久性,很难在普通乘用车中使用。
低速时出现的涡轮滞后(与自然吸气发动机不同)是涡轮增压器难以使用的另一个原因。随着发动机耐久性的提高和涡轮增压技术的发展,涡轮增压器得到了广泛的应用。
包括可变几何涡轮增压器(VGT)、2级涡轮增压器(双涡轮增压器)和电动涡轮增压器(ETC),这些技术可以减少涡轮滞后。这些技术有望发展成为电动涡轮增压器技术。这是因为电动机能够在施加电流的瞬间产生最大扭矩。

这项研究是由韩国电工技术研究所(KERI)和Keyyang精密有限公司(位于韩国庆尚北道金川市的传统涡轮增压器制造商)的研究人员共同进行的。他们共同开发了高速表面安装的永磁同步电机(SPMSM)和脉冲宽度调制(PWM)驱动的逆变器。
为涡轮增压器提供了高功率密度和高效率,并在上游增加了一个额外的电动压缩机(TEDC)。大多数电动涡轮增压器的拓扑结构是EAT或TEDC。选择TEDC而不是EAT的原因电动机与传统的涡轮增压器是分开的,使用TEDC很容易保证热稳定性。

由于电动机是独立的,它具有改善瞬态响应的优点。在EAT拓扑中使用pm的情况下,电机位于传统涡轮增压器轴上,不容易确保热稳定性。轴的转动 惯量增大 ,这对瞬态响应是不利的。

我们的电动涡轮增压器系统运行功率为3kw,转速为100,000 rpm,适用于1600cc的柴油车辆,可将涡轮滞后降至0.4 s以内

在设计高速永磁电机时,考虑到运行环境和条件等特性,选择合适的材料是很重要的根据杆槽组合。还需要考虑能够承受高速运行所产生的离心力并具有抗振动和抗噪声的 坚固性的结构。

选择适合这些操作条件的轴承也很重要。选择极槽组合和绕组拓扑结构。利用ANSYS Maxwell软件分析了偏心偏心引起的电特性,并利用ANSYS力学模块对偏心偏心引起的非均匀电磁力(单向耦合)进行了三维模型的力学特性分析。

极槽组合和绕组拓扑的选择
最大限度地提高功率密度的方法之一是增加永磁电机的极数。如果电机在齿轴和定子轭架处具有相同的饱和磁通密度,则增加极数的电机设计会减小定子的外径。如果增加磁负载和电负载,电机的尺寸减小,功率密度可以提高。
当考虑到电机的可控性时,增加极数是有限的。如果控制正弦电流的开关次数为每周期10至20次,则极数取决于最大运行速度。考虑到上述条件,高速电机可使用的极数在2 ~ 4级之间。
由于电机特性随极槽组合而变化,确定最佳槽数非常重要。槽数的确定应考虑齿槽转矩、绕线配置、绕线系数、匝数、功率密度、径向力、机械结构和制造成本等因素。后者应基于给定绕组是否可以使用自动化或是否需要人工劳动来生产。

在确定最优槽数之前,首先要确定采用哪种绕线方式,是集中绕线还是分布绕线。分布式绕组,即重叠绕组,其绕组间距等于或略短于极距。

这种绕组具有较高的绕组因数。这种绕组配置的缺点是长端线圈,这会导致铜的损耗和消耗。集中绕组称为齿圈绕组或非重叠绕组,通常通过在单个定子齿周围放置导体而制成。

与分布绕组相比,集中绕组具有更高的槽填充系数和 更少的端圈 ,更小的铜损耗和优良的制造工艺。
由于绕组系数相对较低,它们需要更多的匝数(或增加堆叠长度)来产生与具有重叠绕组的等效电机相同的扭矩,且具有较大的谐波分量。
在工作中,杆数固定为2。槽数由3个改为12个,倍数为3,通过调整线圈跨度,采用集中绕组和分布式绕组。在可能的组合中,当极距(槽数/极数)为分数阶时,只使用集中绕组。

当极距为整数时,采用集中绕组和分布式绕组。只有绕组因子大于等于0.866的选项。三相电机定子绕组磁动势(MMF),N为匝数,w为激励角速度。

在空间谐波分布的研究中,将最低阶谐波分量定义为基元分量。它的阶是h = P/2。为了说明所考虑的五种情况之间的差异,显示绕组空间分布中15次谐波下的相对振幅(相对于基波)。

三倍的空间谐波没有列在表中,它们不会产生净定子场。四种情况(除了情况1)包含6h±一阶谐波。情况1的损耗预计比其他情况更大,它包含6h±一阶谐波,以及额外的偶阶谐波。
为了比较这五种情况下的电磁性能,保持定子的内径、外径和堆叠长度相同 ,串联的匝数也相同。根据槽数的变化调整齿宽,并保持后轭的厚度不变。

获得相同的转矩和输出,通过调整输入电流进行了三维有限元分析。综合考虑各案例的性能,案例4在相同条件下表现出最佳的性能。
基于偏心的解析模型
电机的健康状态是转子中心与定子中心重合。这使得径向电磁力可以相互抵消,切向电磁力可以产生具有相同气隙的平衡扭矩。由于制造缺陷、运行过程中的问题或其他原因,很难获得转子和定子对称轴的完美重合。

静态或动态偏心的固有水平通常在气隙的10%以内。这种偏心会导致轴承损坏、不平衡磁拉力(UMP)以及过度的 噪声和振动。
它可能导致转子极与定子极摩擦,导致电机逐渐恶化。偏心率包括静态偏心率(SE)、动态偏心率(DE)和混合偏心率(ME)。

电动机中,当转子对称轴与转子旋转轴同心,但相对于定子对称轴错位时,就会发生SE。最小径向气隙长度的位置是固定的。这可能是由定子铁心椭圆形引起的,或者在调试或维修后,定子铁心或轴承的定位不正确。
它的水平通常不随时间变化。当定子对称轴与转子旋转轴同心,但相对于转子对称轴发生错位时,就会发生失位。在这种情况下,最小径向气隙的位置随转子旋转。

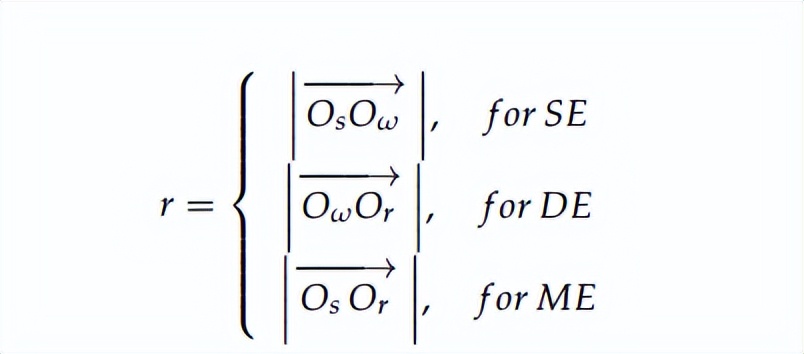
这可能是由磨损的轴承、弯曲的轴、转子的不对称热膨胀或高水平的静态偏心引起的。实际机械中的偏心率通常表现为两种偏心率的组合(定义为ME)。这些类型的断层可以根据其几何特征用下列方程表示。
偏心度,g为均匀气隙情况下径向气隙长度。Or、o、Ow分别为转子、定子和旋转对称中心。三个矢量分别是静态、动态和混合传递矢量。
电特性
当偏心发生时,电机磁路的平衡被打破,结果是UMP。有一种力将转子拉到一侧以及旋转扭矩,并且这种力传递给轴承,引起噪音和振动,并加速轴承的劣化。对三种偏心在健康状态下、偏心在25%和50%时的电特性进行了分析。
研究了直流电源通过逆变器向电机提供的电流波形。该波形提供空间矢量脉宽调制(SVPWM)波形的电流,其中谐波成分混合在正弦波中。 在12459个单元的二维电磁场分析中 ,采用电路仿真得到的SVPWM电流波形作为电流源进行分析。

采用麦克斯韦应力张量法计算电磁力,根据偏心量计算气隙中径向和切向产生的磁通密度。此时的电磁力压力。
当静、动、混合偏心为25%时,健康工况与偏心工况的电磁力压力差三度为50%时,健康工况与偏心工况的电磁力压力差异显著,混合偏心工况下径向压力分布的不对称性增大。
压力分布结果,可以预测相同的偏心距会有较大的不对称力传递到定子齿上,其传递顺序依次为混合偏心距、静偏心距、动偏心距,且对振动影响较大。
当电动机发生偏心时,不仅会发生静态偏心或动态偏心;大多数情况下涉及混合偏心与两个同时。采用混合偏心来模拟实际情况。这样做也是为了清楚地分析偏心的影响。
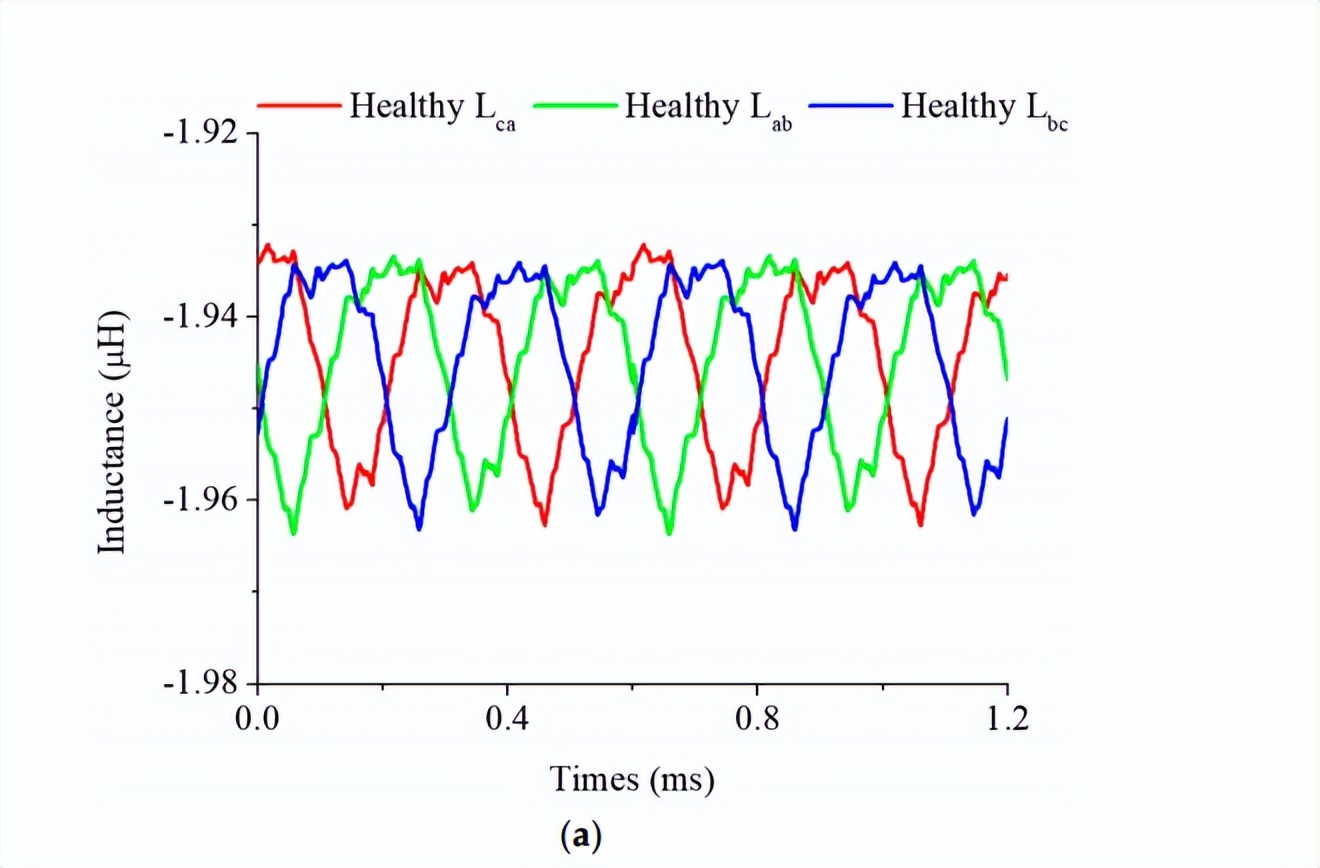
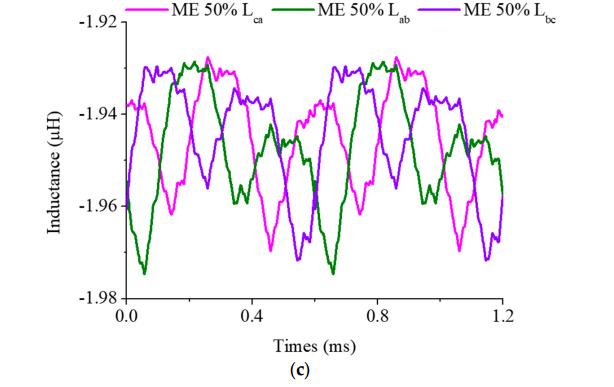
UMP是最大的。不规则气隙距离和UMP引起的线路电感变化。A相和B相之间的线电感变化最大。

给了电流波形下的平均转矩、转矩脉动比和最大磁通密度,以及考虑静态和动态偏心的混合偏心。在理想情况下,施加正弦波形的电流,而在实际情况下,提供接近正弦波形的PWM电流波形,根据偏心量的不同,平均差异为22.6%。
在同一电流波形中按偏心量计算的转矩脉动比方面,正弦电流波形的转矩脉动比从0.26%提高到6.1%,提高了5.84%。另一方面,对于PWM电流波形,转矩纹波率从23.1%提高到28.3%,提高了5.2%。无论电流波形如何,最大磁通密度随偏心度的变化而变化。

力学特性
根据上节考虑偏心效应的电磁分析结果,进行强迫振动分析。将计算得到的各定子齿端径向和切向电磁力(载荷)(其谐波分量在时域)转换为频率使用快速傅里叶变换(FFT)。将负载的频率分量作为激励力应用于具有878,784个单元的电机和夹具的 三维模型 中。
混合偏心度下y轴方向振动速度的结果。在正常状态下,振动速度仅在过极频率处显示,该频率是由电动机产生的典型电磁力引起的激励频率。利用极数和槽数的最大公约数(GCD)可以预测振动模态。

该电机的GCD为2,预计观察到椭圆振动模式。在过极频率(3333.33 Hz)处存在椭圆振动模式。
随着混合偏心程度的增加,在过极频率(1666.67 Hz)的一半频率处也观察到振动速度,并且偏心产生的频率与模型固有频率发生共振,出现一个较大的峰值。证实了偏心效应产生了除过极频率外的其他频率。偏心的存在与否可以通过测量振动来评估。

结论
利用ANSYS软件,根据不同偏心量对高速电机的电气和机械特性进行了分析。在分析偏心影响之前,根据不同型号的极槽数和绕组方式,通过对绕组因素的比较、空间谐波分析和电磁场分析。
选择了一种分布绕组(短节距)的2P12S电机。在选定模型的基础上,进行了电磁场分析和强迫振动分析,确定了其静态、动态和混合偏心。

当偏心率增加到50%时,线路电感的不平衡更加严重,与健康状态相差0.55%。在强制振动分析中,确认了在过极频率(1666.67 Hz)的一半处产生了除过极频率或激励频率外的其他振动频率。
通过确定绕组电感大小的变化和线对线波形的不平衡,可以预测偏心率。在未来,我们计划将由于驱动电机时电感线间波形的不平衡而导致的 偏心预测与分析结果进行比较 。还计划测量实际振动,并将其与强迫振动分析的结果进行比较。