MOVIDRIVE® B Inverters
Extended Positioning via Bus 扩展总线定位功能

LY 2_E 10/1998
功能概括
总线定位功能模块” Extended Positioning via Bus”的优势
- 用户友好界面;
- 用户只需设置” Positioning via bus” 模块所需的相关的参数(速度,直径,比例因子);
- 根据系统提示,用户一步一步完成设置,无需编程即可完成控制;
- 监控模式用于监控通讯状态及电机运行状态,使故障判断更加容易;
- 用户无须编程经验,在较短的时间内便可以掌握调试方法;
- 可以实现最长262米的距离位控;
- 使用增量型编码器或绝对值编码器作为外部编码器,可适用于各种机械连接结构的位置控制;
功能描述
扩展总线定位”Extended positioning via bus”提供如下的功能:
通过总线控制在有效控制范围内,以不同的速度和斜率实线任意目标位置的定位;注意:最大运行距离依据运行距离单位(Travel Unit)而定。
|
距离单位 |
最大运行距离 |
|
1/10mm |
26.2m |
|
mm |
262m |
- 通过总线可以根据需要随时改变运行速度和斜率;
- 具有软件限位功能;
- 循环扫描实际转速、实际位置、有功电流和控制器的利用率;
- 通过PI:3目标位到达“Target position reached”确认位置控制结束;
- 实际位置源(电机侧编码器,外部编码器或绝对值编码器)可以选择;
- 和上位机PLC连接简便;
- 4个过程数据可替代6个过程数据运行,在这种情况下 Ramp function 没有具体规定。
- 三种运行模式:点动模式,参考模式和自动模式;
硬件描述及接线
硬件要求及接线
- 变频器
-该应用模块须选用MOVIDRIVE B应用型变频器(…-0T)
MOVIDRIVE MDX60B不能使用该功能
-须依据总线类型选择相应的总线卡,过程数据为4个字或6个字;
- 电机
-对于MDX61B附件DEH11B:
CT/CV异步伺服电机或DR/DT/DV异步电机可选则Hiperface,sin/cos或TTL编码器
-对于MDX61B附件DER11B:
CM/DS同步伺服电机旋转编码器为标配
- 编码器
-电机轴和负载紧密连接,无打滑;无须外部编码器
-电机轴和负载不紧密连接,有打滑现象;须安装外部编码器
[1]当使用外部增量型编码器时,编码器信号需要连接到X14接口。
[2]当使用外部绝对值编码器时,编码器信号需要连接到DIP卡的X62接口。
限位开关
-限位开关的覆盖范围必须含盖运行区域。
-限位开关需使用常闭触点,即低电平有效。

准备工作
硬件
-计算机一台
[1]装有Windows 95、Windows 98、WindowsNT4.0、Windows2000 或者Windows XP操作系统;
[2] 安装 MOVITOOLS 4.20 或 4.20 以上的版本。
-根据实际情况,选择适配器接口一套
UWS21B---PC的串口与变频器相连接;
USB 11A---PC的USB口与变频器相连接;
初始化及组态
在进行操作之前需要完成下列工作
-变频器初始化;
-变频器组态;
-如使用绝对值编码器,则需要对绝对值编码器卡DIP初始化;
总线通讯
总线过程数据

PLC向变频器发送6个过程输出字(PO1…PO6)
PLC接收由变频器返回6个过程输入字(PI1…PI6)
|
PO1 |
Control word2 |
控制字2 |
PI1 |
Status word |
状态字 |
|
|
PO2 |
Target position high |
目标位置 |
PI2 |
Actual position high |
实际位置 |
|
|
PO3 |
Target position low |
目标位置 |
PI3 |
Actual position low |
实际位置 |
|
|
PO4 |
Speed setpoint |
设定速度 |
PI4 |
Speed actual value |
实际转速 |
|
|
PO5 |
Accelerating ramp |
加速时间 |
PI5 |
Actual current |
实际电流 |
|
|
PO6 |
Deceleration ramp |
减速时间 |
PI6 |
Unit utilization |
利用率 |
PO过程输出字
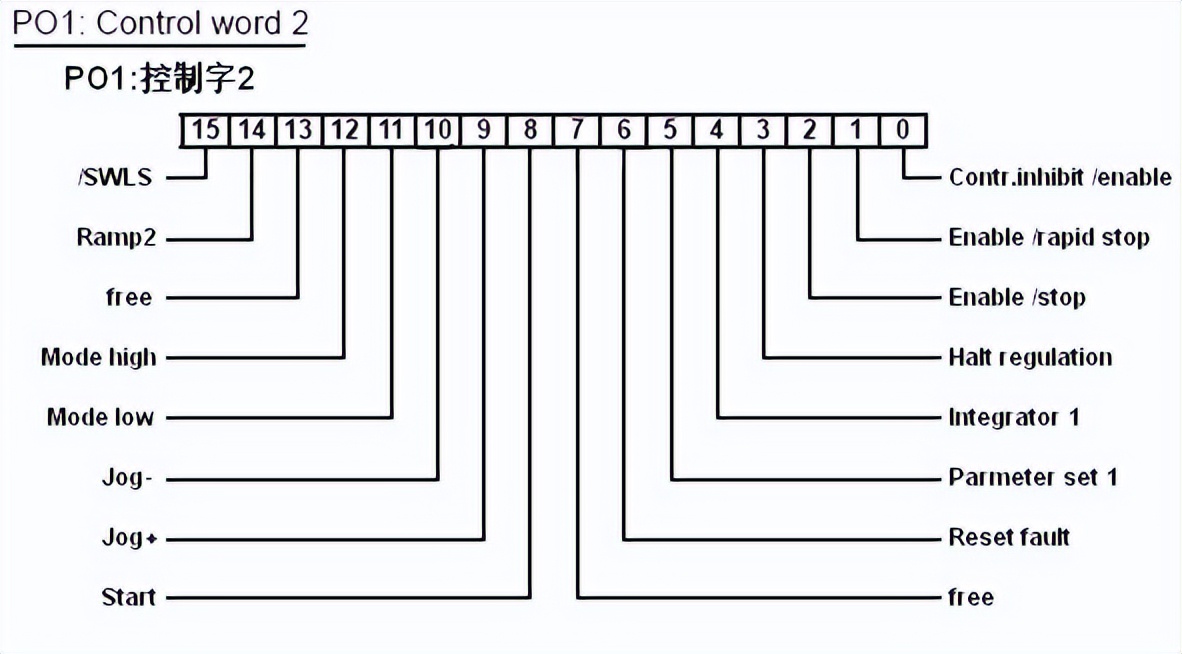
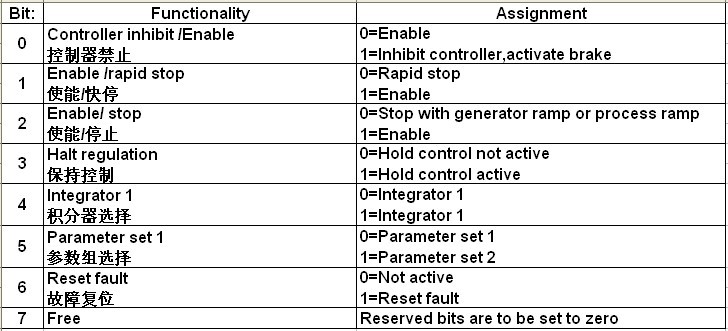
PO1-控制字2的低字节
PO1-控制字2的高字节

PO过程输出字

过程输入数据的定义:


如果故障位(bit 5)为高电平,状态字的高字节显示故障码
如果故障位(bit 5)为低电平,状态字的高字节显示变频器的状态
PI过程输入字

扩展总线位置功能”Extended Positioning via bus”程序初始化
- 打开[MT-Manager] / [Shell]
- 对变频器进行初始化
- 选择[Startup] / [Extended Positioning via bus]或[Main Menu]/[Applications]/[Extended Positioning via Bus]

双击打开
Extended Positioning via Bus
应用模块
设置总线参数
|
选择总线通讯类型 |
|
总线地址 |
|
总线通讯溢出时间 |
|
通讯溢出的响应 |
|
总线通讯波特率 |

设置总线参数:
-系统总线(SBus)已经集成在控制器 内,无须选件卡的支持
-如果选择其他类型总线通讯方式,需要相应的总线卡支持
PROFIBUS --- DFP
Interbus ------- DF1
Can ------------- DFC
DeviceNet ----- DFD
Ethernet ------- DFE
设定距离和转速的比例因子参数
计算脉冲
距离的比例因子
:
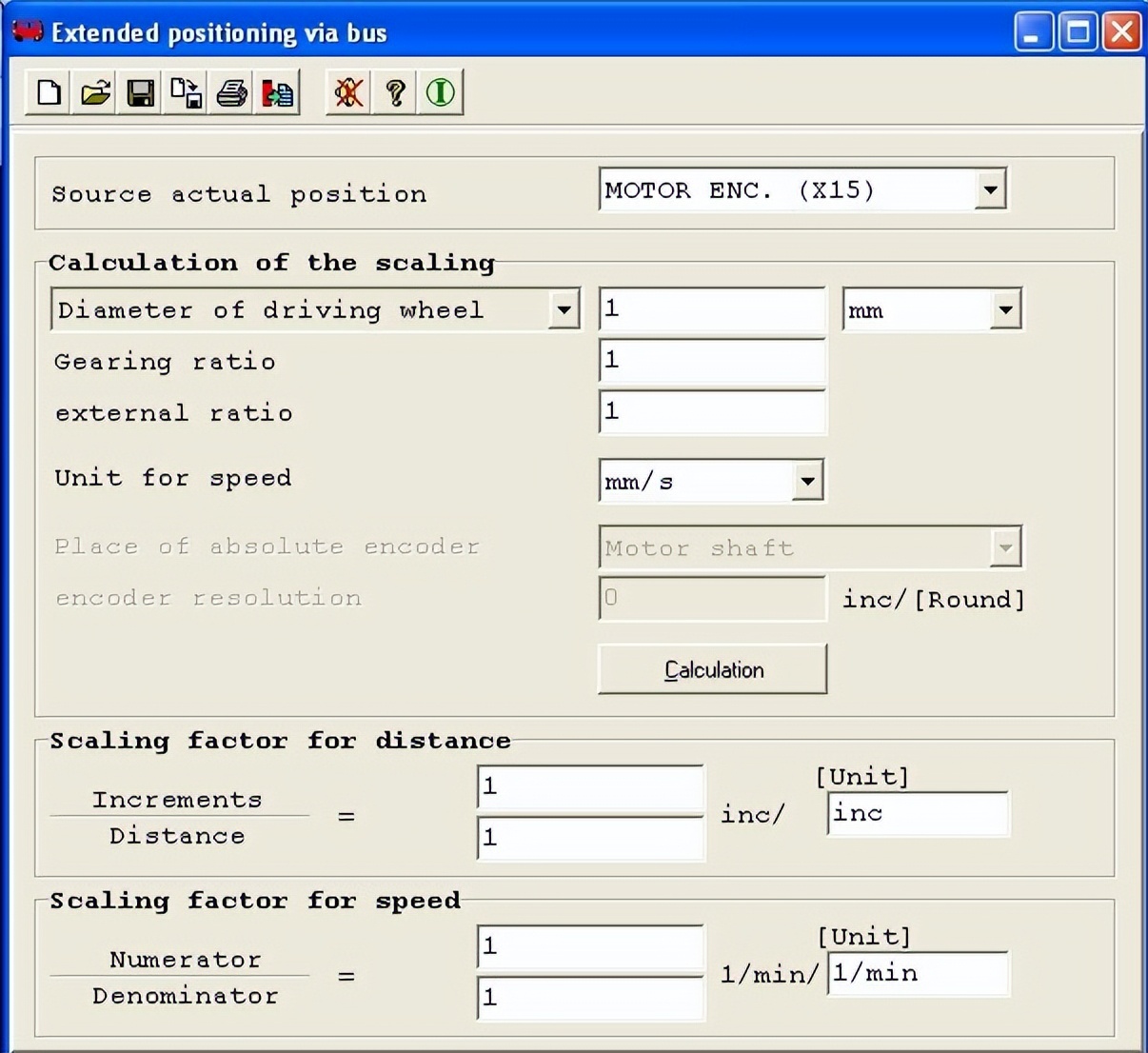
根据编码器源选择实际位置源:
电机编码器
MOTOR.ENC.(X15);
外部编码器EXTERN.ENC.(X14);
绝对值编码器ABSOL.ENC.(DIP);
计算:切记-
在输入以上数据后必须点击Calculation设定驱动轮盘直径或者螺旋升角;
设定减速机速比;
设定外部减速速比;
其单位包括:毫米、1/10毫米;
注意:如Calculation of the scaling标题框中相关数据不进行填写,并且不点击
Calculation按钮,则设备运行距离是以脉冲为单位。
-选择滚筒直径”Drive Wheel Diameter”,写入实际值单位为毫米[mm]或1/10毫米[1/10mm]
-写入减速电机和外部减速设备的减速比
-点击<Calculate> 计算比例因子.脉冲/距离将会计算,单位为inc/mm
Distance scaling factor 距离比例因子 Speed scaling factor 转速比例因子
-距离比例因子将自动计算和写入 -距离比例因子将自动计算和写入
Pulses=4096*i gear unit*external gear unit 1/min=(p*d / i) / 60=(p*d) / (60*i) mm/s Distance=p * d drive wheel
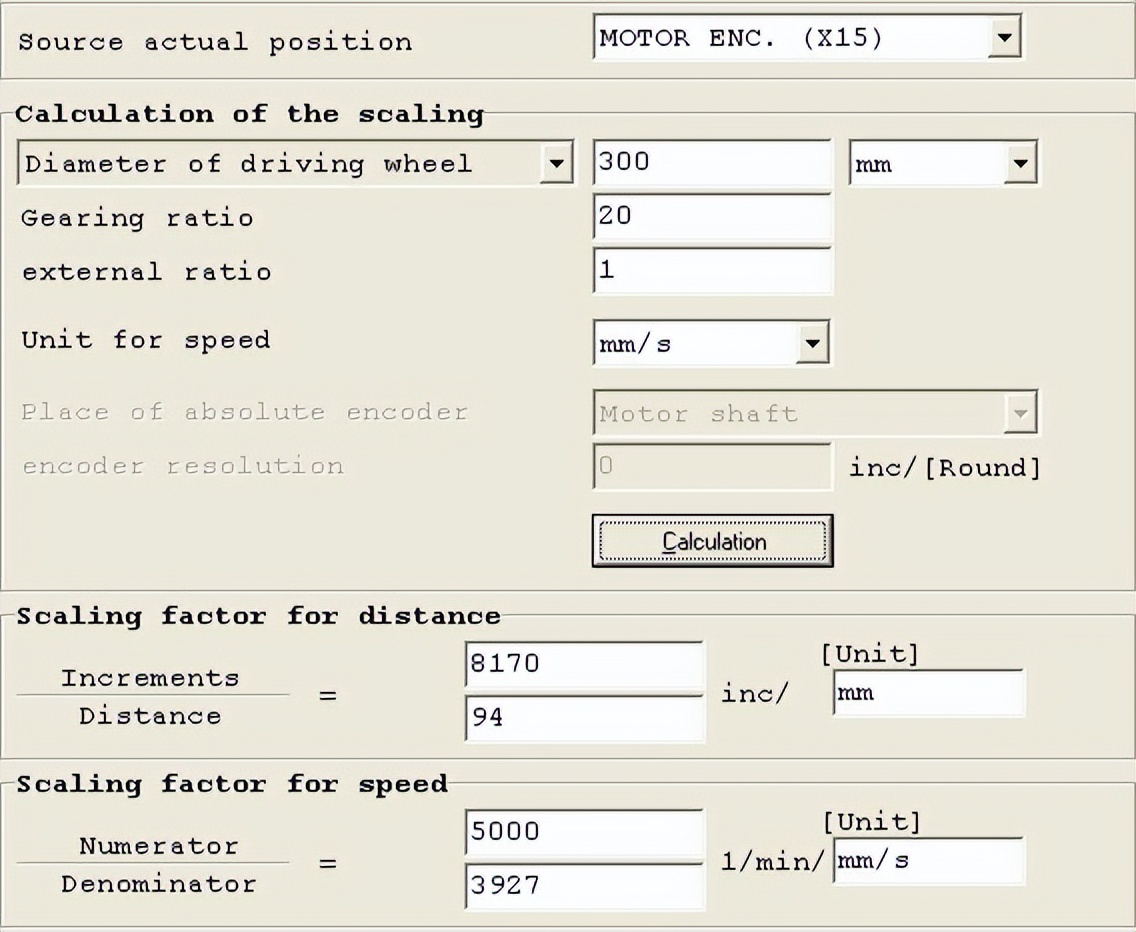
举例1:电机侧的增量型编码器或绝对值型编码器做为实际的位置源
- 在“Diameter of driving wheel”中选择相应的单位,毫米[mm]或1/10毫米[mm]
- 在”Gearing ratio”窗口中,输入减速机的速比在“External ratio”窗口中,输入外部减速设备的速比
- 在转速单位”Unit for speed”窗口中,选择[mm/s],[m/min],[1/min] - 对于绝对值编码器位置控制,在“Place of absolute encoder”窗口中,选择”Motor shaft” - 点击计算<Calculation>按钮。距离“distance”和转速”speed”比例因子由程序自动计算
选择过程控制参数

-
软件限位开关:0--表示无软件限位-无
硬件限位开关:有
参考偏置:0-寻参方式:方式8.
(在变频器不使能的情况下,
即可进行寻零的工作)方式0
(在变频器使能的情况下,才允许可进行寻零的工作)设定参考类型:绝对值编码器第一次使用运行
自动模式下,最大电机速度-点动模式下,最大电机速度-最大转速控制-自动模式和点动模式的最大速度必须比最大转速控制(Nmax speed control)小10%。
- 软件限位开关
-在软件限位开关”Software limit switch CW/CCW”窗口中,输入软件限位开关的位置值.
-软件限位开关的位置值在硬件限位开关的范围内,不能超过其范围之外.
-如果设置为’0’,软件限位开关的功能无效
- 参考偏置
-在参考偏置”窗口中,定义参考的偏置值
-机械的零点将发生变化:机械零点=参考位置+参考偏置
*载下**应用模块参数

点击*载下**按钮,将设定的参数*载下**到变频器中。
点击*载下**按钮,如下的功能将被执行:清除参数锁定功能
停止IPOS
程序*载下**总线位控应用模块的程序
设置总线参数
设置参数的比例值
设置软件限位开关、斜率和最大转速
激活IPOS位控程序
重新激活参数锁定功能
程序识别
- 打开[MOVITOOLS] / [Shell]
- 选择[Display] / [IPOS information…]

变频器中当前所使用的模块名称
使用模块的版本
监控模式和控制模式的切换

控制模式:
[1]Controller inhibit(DI00)=0
[2]选择Control监控模式:
[1]Controller inhibit(DI00)=0
[2]选择Monitor mode通过”Monitor”和”Control”按钮选择控制源-
Monitor:可以监控PLC发出的控制字、变频器和电机的状态及正确性。
Control:通过PC模拟PLC发送接收过程数据。
[1]PO1由鼠标设置或撤除每一个控制位;
[2]2PO设定转速“Setpoint speed”;
[3]PO3目标位置”Target position”;
[4]点击<Send>发送过程数据到变频器中;
点动模式
点动模式选择:
DI13(Mode Low)=1
DI14(Mode High)=0

[1]在点动模式,通过P01中2个控制位的选择,实现电机正向运行和反向运行;
Bit 9=1 正向运行
Bit10=1 反向运行
[2]点动的转速通过过程输出值PO2设定;
[3]斜率类型P916设置为“LINEAR”
或”JERK LIMITED”,允许在车体运行过程中变更速度和斜率,P916中其它的斜率类型设置为其他类型,则不具备该功能; [4]如果已完成参考运行,当前的位置值将现实在系统的窗口中;
[3]PO3中所输入的数值需在-32768~32767 范围内。
点动模式的时序图
PO1:8 = Start
PO1:9 = Jog+
PO1:10 = JogPO1:11 = Mode Low
PO1:12 = Mode High
[1]当”Jog+”=1,正向运行
[2]当”Jog-”=1,反向运行
参考运行模式 参考运行模式选择:
PO1:11 = 1 PO1:12 = 0
注:在设备第一次运行以及更换

[1]如果使用电机编码器,必须进行参考运行。否则,不可能进入自动运行模式;
[2]选择相应的参考运行类型,参
考运行的转速可通过P901和P902 参数设定;
[3]参考运行的过程:
a.变频器使能,设置硬件信号,
Controller inhibit(DI00)=1
Enable(DI01)=1
b.切换到参考运行模式 c.激活参考运行PO1:8“ Start ”=1
d.等待,到轴参考点P11:2”Axis 编码器后,进行参考运行。referenced”=1
e.取消参考运行“ Start ”=0
参考模式时序图
PO1:8 = Start
PO1:11 = Mode Low
PO1:12 = Mode High
DI03 = Reference cam
PI1:2=IPOS reference

[1]开始参考运行(参考运行模式2)
[2]到达参考凸轮开关
[3]脱离参考凸轮开关
[4]当电机禁止,PI2”IPOS reference”为高电平
自动模式 自动模式选择:

PO1:11 = 1 PO1:12 = 0
3. 自动运行的过程:
a.变频器使能,设置硬件信号,
Controller inhibit(DI00)=1 Enable(DI01)=1 设置控制字1“Enable / Rapid stop”=1b. 切换自动运行模式
c.设置给定位置和给定转速,如果设定的位置和当前的实际位置不相同,位置
到达的状态”Position reached’=0
d.激活开始运行PO1:8“Start”=1,在整个位置控制过程中保持
- PO2和PO3定义目标位置 e.等待,到目标位到达”Target position PO4定义转速设定值
PO5定义加速斜率 reached”=1 PO6定义减速斜率 d.取消位置运行”Start”=0
- PO1:15的电平定义在Startup中的2个位控斜率
举例:目标位置的举例说明
- 目标位置:+70000mm(11170hex)
[1]PO2和PO3 16进制表示: -POSITION HI:1
-POSITION LO:1170
[2]PO2和PO3 十进制表示:
-POSITION HI:1
-POSITION LO:4464
- 目标位置:-70000mm(FFFF EE90hex)
[1]PO2和PO3 16进制表示: -POSITION HI:FFFF
-POSITION LO:EE90
[2]PO2和PO3 十进制表示:

-POSITION HI:-1
-POSITION LO:61072
自动模式时序图
PO1:8 = Start
PO1:11 = Mode Low
PO1:12 = Mode High

PI1:3=Target position reached
[1]自动模式选择
[2]开始位置控制
[3]目标位置到达
案例分析工艺:



伺服电机驱动小车,承载砂箱,在水平轨
道上移动,两个定位位置,保证轨道对接,砂
箱顺利移动,砂箱推动是靠液压臂。
配置:
电机:
CM112M/TF/AS1H/SB50
控制器:
MDX61B0220-503-4-0T
编码器接口板:
DEH11B
总线板:
DFE12B
沙箱转运车
案例分析
热处理辊底炉机器手抓取控制系统
工艺:
伺服电机需要采用双输出轴形式,带动丝杠升降运行
需要采用外部绝对值编码器进行绝对定位操作,编码器型号为KUBLER 9081.控制方案为外部绝对值编码器安装在减速机输出轴上,减速机速比为4.49
配置:
电 机:KA57CM90L/BR/HR/2WE/RH3L/A+B/KK/M5/180°
控制器:MDX61B0055-5A3-4-0T Mamax=18.2Nm 编码器接口板:DEH11B 绝对值编码器接口:DIP11B 总 线 板:DFP21B 制动电阻:BW247
参考资料

