今天总结的是如何对传感器节点探测到的数据进行融合,以提高发送数据的有效性以及减少能耗的目的
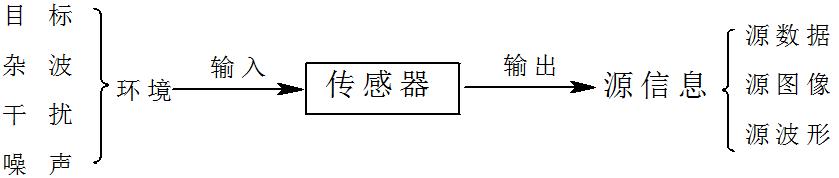
通常传感器直接给出的数据称作源信息,可以是源数据也可是源图像,源信息也正是信息系统处理的对象,源信息、传感器以及环境三者之间的关系如下图所示:
数据融合是对多传感器信息进行处理的最关键技术,在军事和非军事领域的应用都非常广泛。消除噪声与干扰,实现对观测目标的连续跟踪和测量等一系列问题的处理方法,就是多传感器数据融合技术,也称多传感器信息融合或多传感器融合;
数据融合也称信息融合,是一种多源信息处理技术;通过对来自同一目标的多源数据进行优化合成,获得比单一信息源更精确、完整的估计或判断。
多传感器数据融合是一种多层次、多方面的处理过程,是对多源数据进行检测、互联、相关、估计和组合;以更高的精度、较高的置信度得到目标的状态估计和身份识别,以及完整的态势估计和威胁评估,为指挥员提供有用的决策信息。
在多传感器系统中所用到的传感器分为有源传感器和无源传感器两种
-
有源传感器发射某种形式的信息,然后接收环境和目标对该信息的反射和散射信息,从而形成源信息例如有源雷达、激光测距系统等。
-
无缘传感器不发射任何形式的信息,完全依靠接受环境和目标的辐射来形成原信息,如红外无源探测器,被动接受无线电定位系统等。
数融合主要包括:多传感器的目标探测、数据关联、跟踪与识别、情况评估和预测。
数据融合的基本目的:通过融合得到比单独的各个输入数据更多的信息。
广义上数据融合的主要作用:
1) 提高信息的准确性和全面性 2) 降低信息的不确定性 3) 提高系统的可靠性 4) 增加系统的实时性
但传感器网络节点的资源十分有限,在收集信息的过程中,各节点单独地直接传送数据到汇聚节点,则是不合适的,主要原因如下:
1) 浪费通信带宽和能量;2) 降低信息收集的效率
传感器网络中数据融合的主要作用:
1)节省整个网络的能量;2)增强所收集数据的准确性;3) 提高收集数据的效率。
数据融合技术的分类:
依据融合前后数据的信息含量进行分类:
数据融合分为无损失融合和有损失融合两类。
1)无损失融合
无损失融合中,所有细节信息均保留,去除冗余的部分信息,此类融合的常见做法是去除信息中的冗余部分。
2)有损失融合
有损失融合会省略一些细节信息或降低数据的质量,减少需要存储或传输的数据量,以达到节省存储资源或能量资源的目的。在有损失融合中,信息损失的上限是要保留应用所必需的全部信息量。
根据数据融合与应用层数据语义之间的关系分类:
根据数据融合是否基于应用数据的语义,将数据融合技术分为三类:
1)依赖于应用的数据融合(ADDA):
需要了解应用层的语义。ADDA技术可以根据应用需求获得最大限度的数据压缩,但可能导致数据中损失的信息过多。
2)独立于应用的数据融合(AIDA):
不需要了解应用层数据的语义,直接对数据链路层的数据包进行融合,AIDA保持了网络层协议栈的独立性,不对应用数据进行处理从而不会导致信息丢失,但数据融合效率没有ADDA好数据融合。
3)结合以上两种技术的数据融合:
同时保留了AIDA层次和其他协议层内的数据融合技术,因此可以使用多种机制、得到更符合应用需求的融合效果。
根据融合操作的级别分类
1)数据级融合
是最底层的融合,操作对象是传感器采集得到的数据,是面向数据的融合,尽可能的保持了原始信息。
2)特征级融合
通过一些特征提取手段将数据表示为一系列的特征向量,来反映事物的属性,是一种面像检测对象特征的融合。可分为目标状态信息融合和目标特性融合两类。 目标特征信息融合:主要应用于多传感器目标跟踪领域,融合系统首先对传感器数据进行预处理以完成数据配准,在数据陪准后,融合处理主要实现参数相关和状态矢量估计。 目标特性融合:主要用于特征层的联合识别,具体的融合方法主要采用模式识别的相关技术,在融合前必须先对特征进行相关处理,对特征矢量进行分类组合。
3)决策级融合
根据应用需求进行较高级的决策,是最高级的融合。决策级融合的操作可以依据特征级融合提取的数据特征对检测对象进行判别、分类,并通过简单的逻辑运算,执行满足应用需求的决策。决策级融合是直接针对具体决策目标,充分利用特征级融合所得出地目标各类特征信息,并给出简明而直观的结果。实时性好,有良好的容错性
三个层次的融合技术可以根据应用的特点加以综合应用
数据融合的主要方法
1)综合平均法
把来自多个传感器的众多数据进行综合平均。它适用于同类传感器检测同一个检测目标。该方法将一组传感器提供的冗余信息进行加权平均,结果作为融合值。
如果对一个检测目标进行了k次检测,则综合平均的结果为:
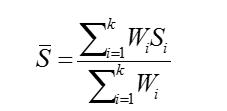
其中,Wi为分配给第i次检测的权重。Si是第i次检测的结果数据。
这是最简单、最直观的数据融合方法。
2)卡尔曼滤波法
卡尔曼滤波法用于融合低层的实时动态多传感器冗余数据。该方法利用测量模型的统计特性,递推地确定融合数据的估计,且该估计在统计意义下是最优的,特别适用于那些不具备大容量数据存储的系统中。
如果系统可用一个线性模型描述,且系统应用卡尔曼滤波器对n个传感器的测量数据进行融合后,既可获得系统的当前状态估计,又可以预报系统的未来状态。所估计的系统状态可能表示移动机器人的当前位置、目标的位置和速度、从传感器数据中抽取的特征或实际测量值本身。与传感器的误差均符合高斯白噪声模型;则卡尔曼滤波将为融合数据提供唯一的统计意义下的最优估计。
3)贝叶斯估计法
贝叶斯估计是融合静态环境中多传感器低层信息的常用方法,它使传感器信息依据概率原则进行组合,测量不确定性以条件概率表示。多贝叶斯估计把每个传感器作为一个贝叶斯估计,将各单独物体的关联概率分布组合成一个联合后验概率分布函数,并使其似然函数最小可以得到多传感器信息的最终融合值。
4)D-S证据推理法
D-S证据推理法是贝叶斯方法的扩展,以贝叶斯方法给出的概率,证据理论则能够处理这种由不知道引起的不确定性,通常用来对目标的位置、存在与否进行推断。每个信息源提供一组证据和命题,并建立一个相应的质量分布函数,因此每个信息源就相当于一个证据体。
D-S证据推理法的实质是在同一个鉴别框架下,将不同的证据体通过Dempster合并规则合并成一个新的证据体,并计算证据体的似真度,最后采用某一决策选择规则,获得融合的结果。
还有一些方法诸如统计决策理论、模糊逻辑法、产生规则法、神经网络法等都可以达到数据融合的目的。