朝着国家“制造强国”的战略目标,我们的社会正在逐步走进工业4.0时代,工业机器人作为企业转型现代工业制造的掌舵手,地位越来越重要,因此,掌握一些工业机器人的知识,有助于我们更好地认识到企业降本增效的手段,同时,对于普通人来说,也能习得更多的技能,拓展知识面。
今天我们要来聊聊工业机器人的世界坐标系和欧拉角。虽然听起来有些高大上,但实际上它们是机器人工作中的“方向盘”,帮助机器人准确地完成任务。让我们来揭开它们的神秘面纱,用通俗易懂的语言来理解它们的关系。
工业机器人的世界坐标系是指以机器人安装基座为基准,用来描述机器人本体运动的直角坐标系。在机器人工作空间中建立的一个固定的、全局的坐标系统,用于确定机器人的位置和方向。这个坐标系相当于一个参考框架,类似于地图上的坐标系,它提供了一个稳定的参考基准,使得机器人能够在三维空间中准确地定位和执行任务。
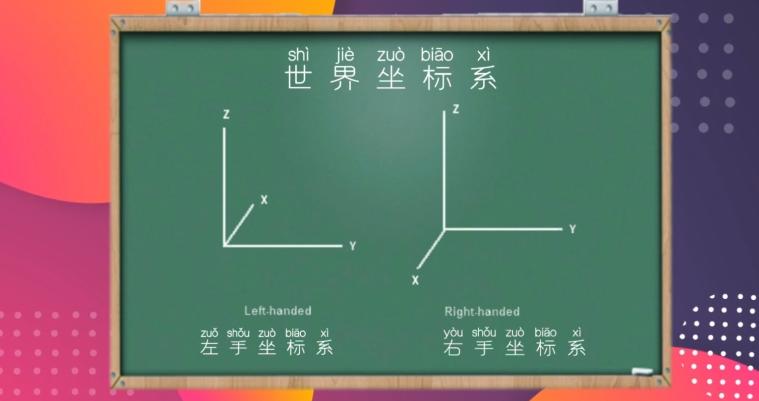
世界坐标系的建立通常是在机器人工作环境中选择一个固定点或参考点,称之为原点。然后,通过确定三个相互垂直的坐标轴(通常是X轴、Y轴和Z轴),在原点处定义一个坐标系。这些坐标轴代表了机器人的前后、左右和上下方向。
世界坐标系相当于一个大地图,给机器人提供了一个稳定的参考框架。想象一下,你要告诉朋友一个地点的位置,你会说:“从A点出发,往北走10步,然后往东走5步。”这里的A点就是参考点,而“北”和“东”就是坐标轴的方向。在工业机器人中,世界坐标系也是类似的概念,它是机器人工作空间的固定参考框架,用来确定机器人的位置和朝向。
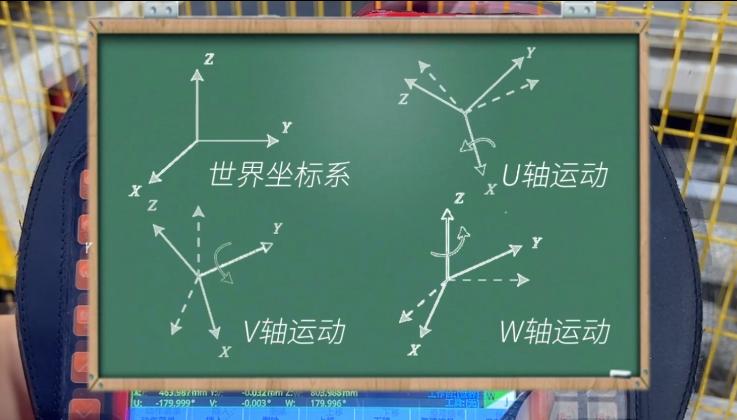
工业机器人的欧拉角(Euler Angles)是一种用于描述机器人姿态(朝向或姿势)的方式。欧拉角是一种用来描述机器人“头朝向”的方式。就像我们人类可以通过头部的俯仰、横滚和转动来调整视角一样,工业机器人也可以通过欧拉角来调整它的朝向。欧拉角由三个角度UVW组成,分别表示绕三个坐标轴的旋转量,通常是绕X轴的滚转角、绕Y轴的俯仰角和绕Z轴的偏航角。
举例子:假设你是一个工业机器人,要拧紧一颗螺丝。首先,你需要知道自己在哪,也就是机器人在世界坐标系中的位置。然后,你需要确定螺丝的朝向,就像你要看准螺丝的位置一样。这时,欧拉角就派上了用场,它们告诉你应该怎样旋转自己的头部,才能对准螺丝的位置。
当然,机器人的世界并不总是那么简单。有时候,我们可能需要把机器人的朝向调整到一个复杂的姿态,而世界坐标系和欧拉角可以帮助机器人更准确地实现这一点。在工业生产中,机器人需要精确地执行任务,比如组装零件、焊接等。通过世界坐标系和欧拉角,机器人就能够在三维空间中准确地定位和操作,就像我们人类在坐标系中做导航一样。
工业机器人的世界坐标系就像是它的“大地图”,提供了一个稳定的参考框架;而欧拉角则是机器人的“方向盘”,用来调整机器人的朝向。通过这两个工具,机器人可以在复杂的工作环境中准确地执行任务。