1、NCU X122/X132/X142 端子信号分配
经出厂设置、拓扑识别后,系统自动为NCU 的X122 和X132 分配如下功能:
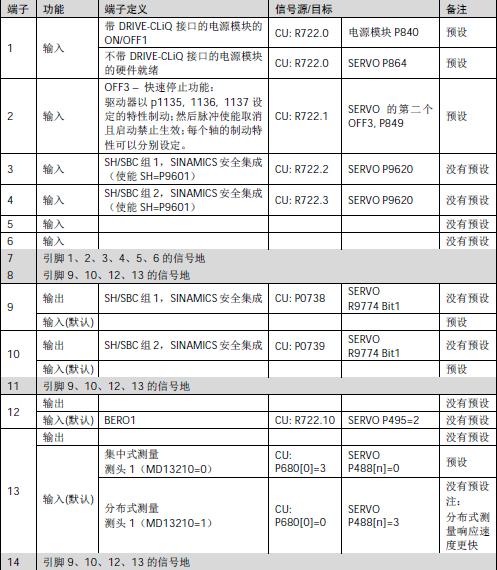
1)控制端子X122 的定义
说明:
1、2、3、4、5、6 隔离输入端子,7 脚为隔离地。
9、10、12、13 端子既可以定义成输入,也可以定义成输出。CU 参数P0728 设置端子的输入、
输出方式。
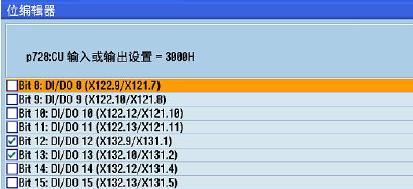
0:输入
1:输出
输入(默认):表示系统已将该端子定义成输入方式。
预设:表示系统已将内部的BICO 定义完毕。
没有预设:表示需手动建立BICO 连接。
2)控制端子X132 的定义

说明:参考X122 接口的说明。
3)控制端子X142 的定义

2、驱动系统上电时序
1)要求
(1)系统上电时,先上供电模块(Infeed)使能OFF1,再上驱动模块(Servo)使能OFF3。
(2)系统断电时,先断驱动使能OFF3,延时断开供电模块使能OFF1。
2)驱动系统供电模块上电时序图
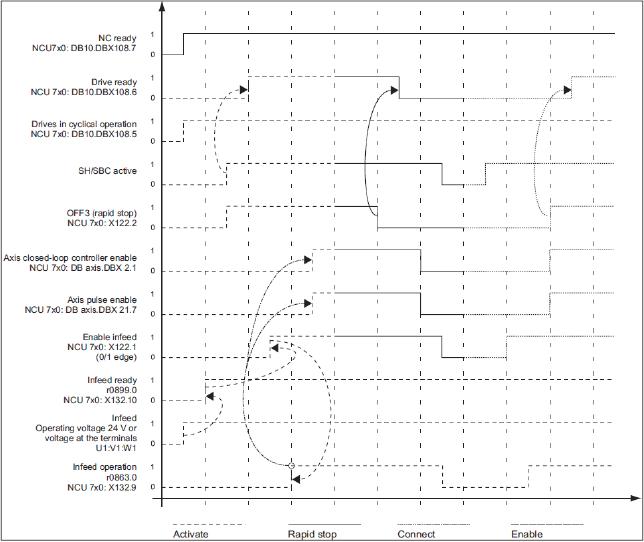
(1)供电模块的EP 控制随系统上电
(2)供电模块(Infeed)使能OFF1 的条件:
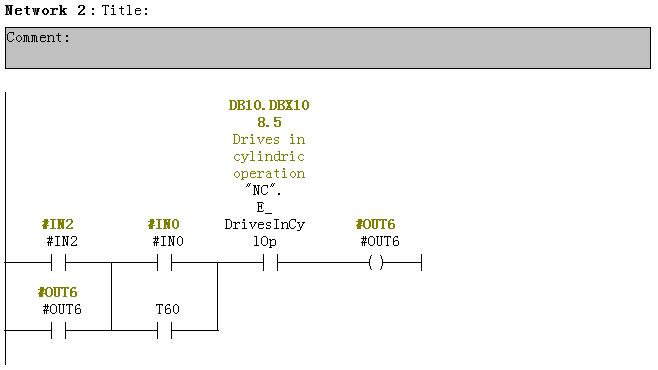
驱动循环运行 DB10.DBX108.5;
驱动准备好NCU X132.10 信号;
OFF1 必须为0->1 的上升沿信号;
ALM 供电模块(含DRIVE-CLiQ 接口)运行正常NCU X132.9 信号为1。供电模块的RDY 绿色显示;
SLM 供电模块(不含DRIVE-CLiQ 接口)硬件接口有Ready 信号输出;
(3)驱动模块(Servo)使能OFF3 的条件:
供电模块运行正常,NCU X132.9 信号为1;
驱动模块使能信号OFF3。
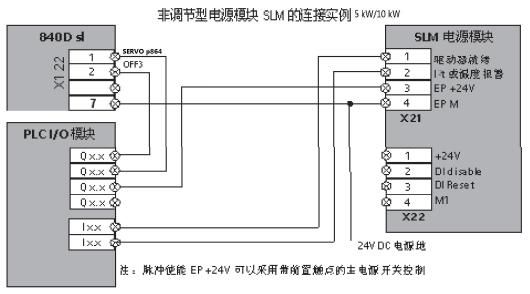
3)驱动控制硬件接线图(实例程序以ALM电源模块讲述)
SLM 电源模块接线图:
ALM 电源模块接线图:
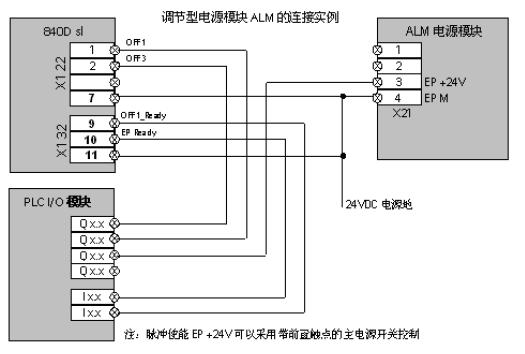
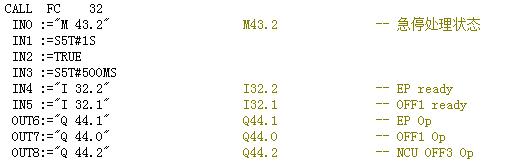
实例图纸中:
840D sl X122端子1对应PLC I/O模块Q44.0,端子定义是NCU720 OFF1
840D sl X122端子2对应PLC I/O模块Q44.2,端子定义是NCU720 OFF3
ALM电源模块 X21端子3对应PLC I/O模块Q44.3,端子定义是电源模块EP
840D sl X132端子9对应PLC I/O模块I32.1,端子定义是OFF1_ready
840D sl X132端子10对应PLC I/O模块I32.2,端子定义是EP_ready
4)程序示例
(1)新建子程序FC32,PLC 控制时序图(ALM 为例)
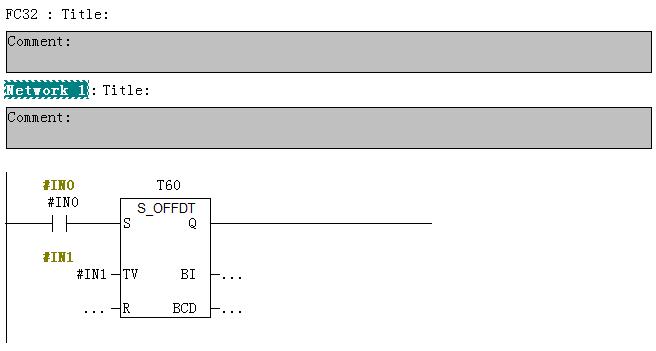
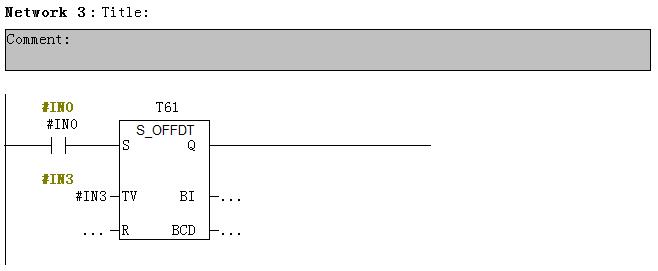
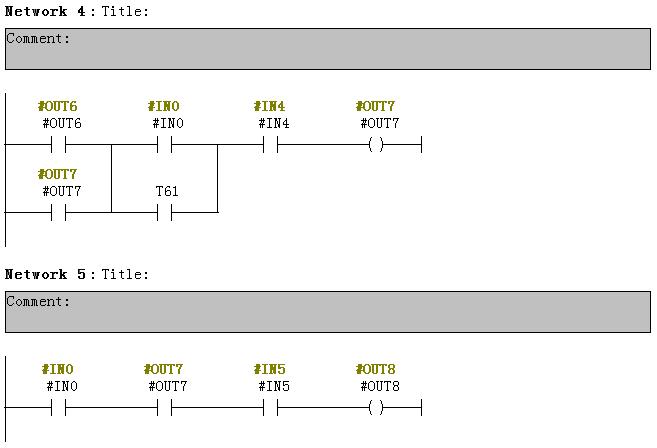
注:FC32程序参考系统上电时序图
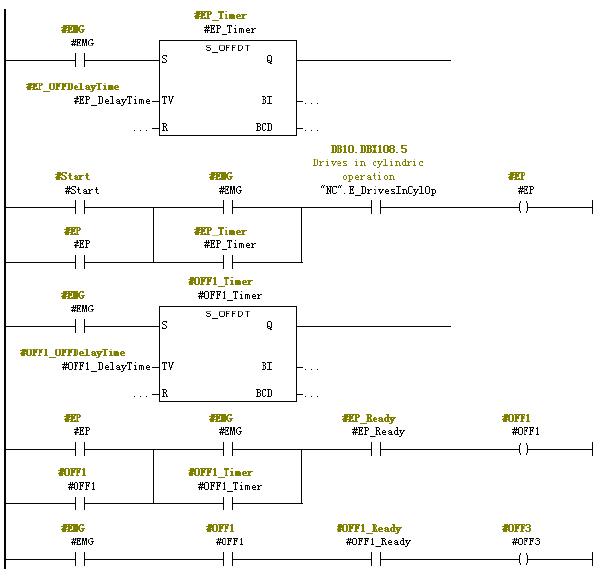
系统上电时序图
EP:可使用PLC 输出点控制。也可使用总开关的提前断开辅助触点进行控制。
OFF1_DelayTime:OFF1 断电延时时间。必须大于各运动轴制动时间,否则运动轴将自由刹车。
危险!
EP_DelayTime:EP 断电延时时间。必须大于OFF1 断电延时时间,否则驱动出现报警:
“206010 供电:运行中缺少功率部件EP 24 V”
(2)在主程序中调用子程序FC32
3、设置SINAMICS 拓扑结构比较等级
驱动调试结束后,应将拓扑结构比较等级设为最低,否则在驱动部件更换后,系统会提示:拓扑结构比较错误。
找到驱动器CU_I 参数P9,输入1;参数P9906,输入3;参数P9,输入0。
驱动器数据存储:
找到驱动器参数P977,输入 1 – 存储数据;
观察驱动器参数P977;当P977 由1变成0 表示数据存储完成;
或者,选择“保存参数”软键来存储驱动数据。
840D sl 及驱动器断电,再上电。
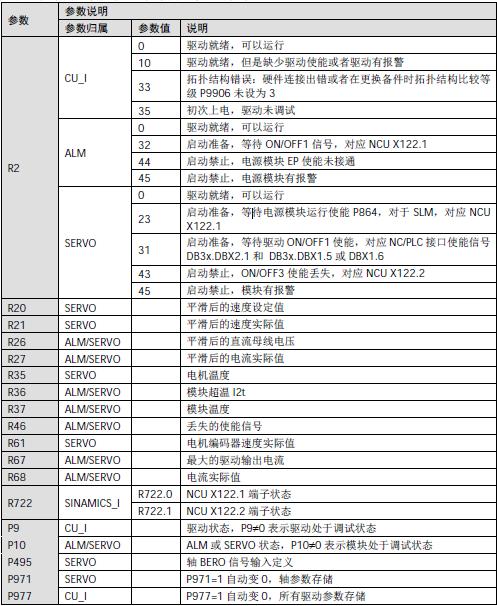
4、SINAMICS 驱动常用参数
SINAMICS S120 的参数有CU 控制单元参数、ALM 电源模块参数、SERVO 轴参数;
其中 R 参数为只读参数,P 参数为可读可写参数。