在过去的几年时间内,无人驾驶技术被媒体一遍又一遍的进行报道,好像真的是要立即改变我们的驾驶以及生活方式,而消费者内心多数也期待无人驾驶技术的到来。但喧嚣之余,在狂热无人驾驶的同时,一部分人也会冷静下来思考,无人驾驶技术这一条路还有多久才能实现生活化,在这条路期间,高级智能驾驶辅助系统(ADAS),是否能给广大消费者带来更安全的智能驾驶的体验。
无论是无人驾驶或是高级驾驶辅助系统,都是为了不断提升驾驶员的安全系数,不断改善消费者的驾驶舒适度和自动化程度。更多的事故调查中发现,驾驶员的不良驾驶习惯及驾驶行为而引起的事故占总事故率的78%,驾驶员的自身行为是导致事故发生的重要原因。因此,找到可实时检测驾驶员行为特征的智能驾驶监测系统,将会不断提高车辆的安全性,降低交通事故的发生率。驾驶员在享受智能驾驶安全同时,尽可能的放松双手和大脑,将会带来一连串的良好效应。
在上世纪七十年代,众多国家就开始了驾驶员驾驶行为监测系统的研究。在国内外众多大研发公司当中,基于驾驶员驾驶行为的监测系统主要是利用驾驶员的生理信号,利用脑电图、肌电图、眼动图、瞳孔分析等来监测驾驶员的各项生理指标。技术的不断改进升级,更多的基于驾驶员行为图像处理算法和瞳孔分析技术,被更好的进行数据采集和分析,达到预警提示效果。
在驾驶员监测系统中,目前上市的产品多数是基于单目摄像头的监测系统。单目摄像头,采集数据不全面,分析结果不完全,而不能完全保证随时对驾驶员的动作侦测,进而判断将失去准确性和实时性的保障。

深圳市一家科技公司开发出技术领先的首款基于三目摄像头的疲劳驾驶预警系统,采集模块主要为深度摄像头、红外摄像头和彩色摄像头相结合,更好的解决了单目摄像头监测系统的局限性。通过适时建立起驾驶员3D模型,针对3路摄像头每一帧图像进行分析处理,可完全准确的判断驾驶员的疲劳状态和不良驾驶行为,及时警示驾驶员疲劳驾驶及危险行为,提高驾驶的安全保障力度,降低由驾驶员失误行为导致的交通事故的发生几率。

那么,对于驾驶员疲劳预警系统为什么要采用三目摄像头进行数据采集呢?深度、红外和彩色摄像头在其中又是怎样的应用呢?接下来,我们逐一分析。
原因一:3D到2D的信息缺失
众所周知,摄像头采集图像数据是从其感光芯片获取的,在摄像头采集图像时总是将一个三围立体空间转化为二维平面处理,我们看到拍出来的照片就是在二维平面上颜色的变化。
如果将图片进行计算机处理,它将首先被数字化,然后被表达成矩阵的形式,其元素对应于图像中相应位置的亮度。而彩*图色**像将会以三通道:红、绿、蓝三种呈现出来,这是一般彩色摄像头能做到的。无论是黑白或是彩*图色**像,被计算机拿来处理的原始数据都是矩阵的集合或矩阵的序列,这就是底层图像处理的基本数据流。而底层图形处理只是包括了图像压缩、噪声滤波、边缘提取、图像锐化等预处理。想要达到更高,更精确的处理,需要将数据进行高层图像处理,即模仿人类的认知并根据包含在图像中的信息进行决策能力。当采用单一摄像头进行图像处理时,图像信息的缺失将会使图像的高层处理变的更加困难,而识别率也将会降低很多。因此传统的单目摄像头在处理驾驶员面部表情和肢体动作时有相对的缺陷
原因二:3D图像信息量的复杂性
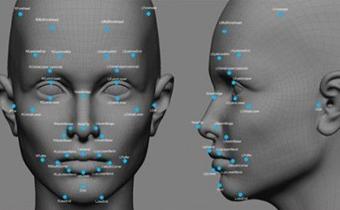
在针对驾驶员的表情和肢体语言进行图像采集并处理的过程,有很多难以捕捉的细微表情,而通过表情和动作进行驾驶行为预测,需要将采集到的二维数据进行3D复原,并且要达到实时的头像及身体跟踪,再进行图像识别和决策。3D复原是保障判断和决策正确性的重要过程,传统的二维平面图形不能满足这项要求。
在对3D复原图形处理过程中,不间断且大量的图像识别和决策,需要进行大量的计算,而完美的处理速度将是及时预警、降低驾驶危险的重要前提。同时由于3D图像的数据量庞大,将会更需要高效能的图像传感和处理系统。
原因三:汽车行驶环境的复杂性
汽车在不断地行驶中,根据外界天气、道路、车辆、交通信号等的复杂性,以及驾驶员肢体语言和面部表情的复杂性,且要达到复杂环境下实时监控驾驶员各项行为表情的要求,就必须利用高速且能满足以上需求的摄像头。比如,当驾驶员行驶在灯光较暗,光线较差的环境下,需要用到红外摄像头和夜视摄像头。
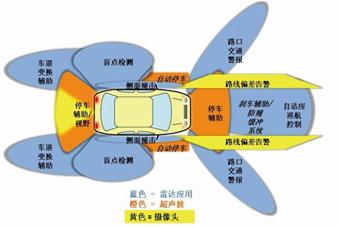
高级智能驾驶辅助系统,将会是数据全面融合的形式呈现到汽车安全保障系统中,而不是单一形式上的模块组合。搭载多种特殊摄像头的高级智能驾驶辅助系统,能满足更可靠的数据信息和更复杂的图形计算。
那么,这几种摄像头在智能驾驶系统中又有什么样的重要作用呢?
首先说一下深度摄像头。
在对驾驶员进行图像捕捉时,图像传感器将进行图像采集,而一般的彩色摄像头只是将3D图像数据进行采集后直接转化为2D图像传输至处理器,而不会对图像进行恢复重建。深度摄像头搭载全新的处理器和3D图像恢复算法,对采集到的数据进行整合分析处理,从而实现2D图像到3D图像数据的恢复,这使得图像数据更加立体,更利于特征数据的判断和决策。
3D图像重构技术是图像处理中属于更高层次的处理技术,在图像分析当中有着相当重要的作用。它将平面图像转化为立体图像,使得图像更加丰富和立体化,从而获得三维的位置和尺寸信息,计算系统就获得了环境和对象的三维立体数据。在进行驾驶员行为分析的过程中可以很好地捕捉到其行为变化,从而分析出危险信号,避免事故的发生。
红外摄像头
红外摄像头主要是针对驾驶环境的复杂性而采用。在夜晚、阴雨天气、光线不足等复杂环境下,普通彩色摄像头不能很好地采集图像数据而设计的。而在光线不足时,普通摄像头的性能就达不到图像采集的要求,更无法进行准确的处理、分析、判断和决策,造成整个系统无法进行良好工作。驾驶员行为监控系统主要是针对驾驶员在各种行驶环境下都能很好的进行实时预警处理,做到全天候的工作状态。
搭载一款红外夜视摄像头,利用红外灯发出红外线照射物体,红外线漫反射,被监控摄像头接收,形成视频图像,以达到夜间捕捉图像的能力。将很好的解决上述问题,无论在夜晚或者阴雨天气,疲劳驾驶预警系统将通过红外摄像头采集到的图像数据进行高速处理分析,从而达到危险预警效果。

彩色高速高清摄像头
由于交通事故的发生只在零点几秒到几秒的时间内,这就要求了系统的快速处理能力达到更高的要求,普通摄像头的采集速度慢,延迟时间长,无法满足以上要求,这就迫切需要采集速度更高的彩色高清高速摄像头,以适应系统的快速反应能力。
彩色高速高清摄像头是在正常环境条件下,利用其中的快速感光元件,可以更好的捕捉驾驶员的行为变化,从采集速度到处理速度达到毫秒级别。利用快速处理器的处理速度,才能实现真正的危险预警,从而避免交通事故的发生。
基于三目摄像头的疲劳驾驶及驾驶员行为分析预警系统,将能更好的分析驾驶员的疲劳程度和危险行为,而单目摄像头系统将会使得图像处理更加困难,降低识别率和判断的正确率,甚至会出现误报,错报的情况,而严重影响驾驶员对汽车状态的判断,这更是不可取的。