说起上世纪二战之后的世界格局,肯定绕不开美苏争霸。谈到美苏争霸,很多人觉得是意识形态对抗下的全面对抗。但是,可能很多人不知道,在这种对抗环境下,也影响到了双方的科技领域,比方说,战机代级的划分、航空航天设计领域坐标的定义等问题。今天我们就来好好说对当今航空航天设计领域依然具有深远影响的两种坐标体系:欧美坐标系和苏联坐标系。(文章有点长,希望大家能耐心看完,当然这可能是作者的一厢情愿,因为很多本科飞行器设计专业的学生都没有把这些内容搞懂)
1 坐标系定义
在飞行器设计相关学科领域,有着两套被广泛应用的坐标系定义方式:前苏联及其引进苏联航空技术建立航空工业体系的相关国家所广泛采用的坐标系定义方式(简称苏联坐标系或者苏联系)和美国、欧洲广泛采用的坐标系定义方式(简称欧美坐标系或者欧美系)。本节内容主要介绍两套坐标系的定义方式。
1.1 苏联坐标系[1~4]
1.1.1 地面坐标系
地面坐标系简称地轴系(Oxgygzg),其原点O固定于地面上某点,Oyg轴铅垂向上,Oxg和Ozg轴在水平面内和Oyg轴构成右手直角坐标系。重力通常在地轴系内给出,并沿Oyg轴的负向。
1.1.2 机体坐标系
机体坐标系简称体轴系(Oxbybzb)。原点O在飞机的质心上,纵轴指向前方,竖轴Oyb在飞机对称面内指向机体上方,横轴Ozb垂直于飞机对称面指向右方。发动机推力一般在机体坐标系内给出。
1.1.3 速度坐标系
速度坐标系(Oxayaza)原点O在飞机质心上;Oxa轴沿飞行速度(空速)方向,向前为正,叫速度轴或阻力轴;Oya轴在飞机对称面内垂直于Oxa轴,向上为正,叫升力轴;Oza轴垂直于Oxaya平面,向右为正,称为侧力轴。作用于飞机的空气动力一般按速度坐标系给出。
1.1.4航迹坐标
航迹坐标系(Oxhyhzh)原点O在飞机质心上;Oh轴沿飞机飞行速度方向,向前为正;Oyh在通过Oxh轴的铅垂平面内与Oxh轴垂直,向上为正;Ozh在水平面内垂直于Oxhyh,构成右手坐标系。
1.2 欧美坐标系[5~7]
1.2.1 地面坐标系
地面坐标系简称地轴系(Oxgygzg)。其原点O固定于地面上某点,Oyg轴铅垂向下,Oxg和Ozg轴在水平面内和Oyg轴构成右手直角坐标系。重力通常在地轴系内给出,并沿Oyg轴的负向。
1.2.2 机体坐标系
机体坐标系简称体轴系(Oxbybzb)。原点O在飞机的质心上,纵轴指向前方,竖轴Oyb在飞机对称面内指向机体下方,横轴Ozb垂直于飞机对称面指向右方。发动机推力一般在机体坐标系内给出。
1.2.3 速度坐标系
速度坐标系(Oxayaza)原点O在飞机质心上;Oxa轴沿飞行速度(空速)方向,向前为正,叫速度轴或阻力轴;Oya轴在飞机对称面内垂直于Oxa轴,向下为正;Oza轴垂直于Oxaya平面,向右为正,称为侧力轴。作用于飞机的空气动力一般按速度坐标系给出。
1.2.4 航迹坐标
航迹坐标系(Oxhyhzh)原点O在飞机质心上;Oxh轴沿飞机飞行速度方向,向前为正;Oyh在通过Oxh轴的铅垂平面内与Oxh轴垂直,向下为正;Ozh在水平面内垂直于Oxhyh,构成右手坐标系。
2 相关参数及其极性定义
2.1 飞行参数及其极性定义
2.1.1 苏联坐标系
机体坐标系纵轴Oxb在飞机对称面内,它与地面(水平面)之间的夹角叫机体俯仰角,或简称俯仰角,记为θ,机头上仰为正;它在水平面Oxgygzg上的投影与Oxg之间的夹角叫偏航角Ψ,机头左偏为正;坐标平面Oxbyb(即飞机对称面)与通过Oxb轴的铅垂面之间的夹角叫滚转角,记为ϕ,飞机右倾斜时ϕ为正,滚转角又叫坡度。
平移地轴系,使其原点与体轴系的原点重合时,可以看出,地轴系与体轴系之间的角度关系完全由三个欧拉角Ψ、θ和ϕ确定(图1)。顺序地使地轴系绕Oyg、Oz'、Oxb轴转过Ψ、θ和ϕ角可使此两个坐标轴系重合。
速度坐标系的Oxa轴与飞机对称面Oxbyb之间的夹角叫侧滑角,记为β。飞行速度(空速)指向飞机对称面右侧时,侧滑角β为正,称为右侧滑。Oxa轴在Oxbyb上的投影Ox'与机体纵轴Oxb的夹角叫迎角,记为α。速度坐标系与机体坐标系之间的方位关系完全由迎角α和侧滑角β确定。由图2可以看出,依次序绕Oya轴、Ozb轴分别使速度坐标系转过β角和α角,可以使这两个坐标系重合。
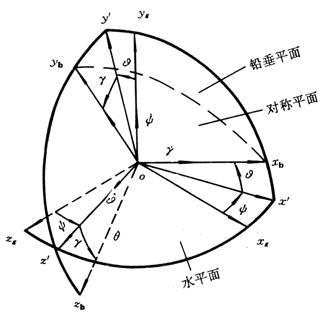
图1 地轴系与体轴系的关系
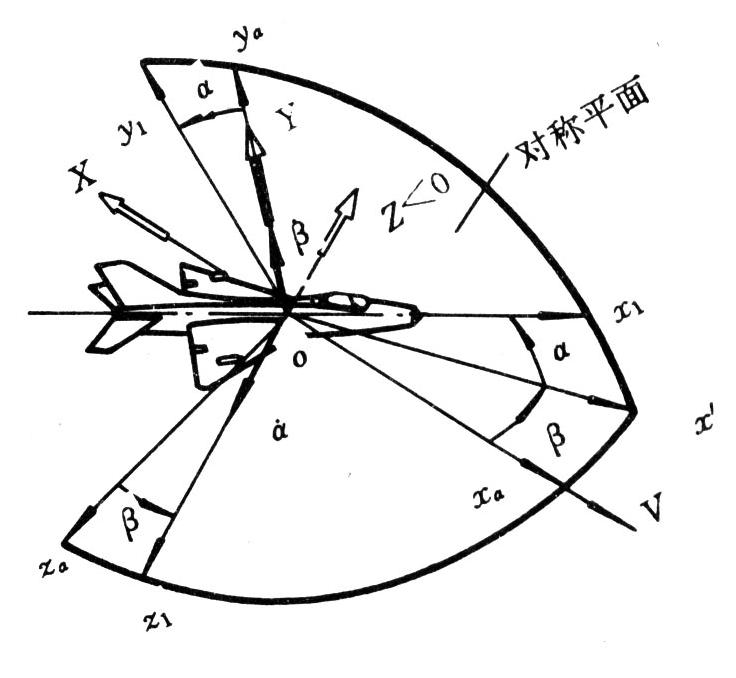
图2 速度坐标系与机体坐标系的关系
航迹坐标系Oxhyhzh与速度坐标系Oxayaza之间只相差一个ϕs角(见图3)叫速度滚转角。规定航迹坐标系绕Oxh轴向右倾斜时,ϕs为正。将航迹坐标系绕飞行速度方向(即Oxh轴)转过ϕs角度即可使这两个坐标系相互重合。
航迹坐标系Oxh轴在水平面Oxgygzg上的投影线Ox'与地轴系Oxgyg之间的夹角ψs叫航向角,飞行方向左偏,航向角ψs为正;航迹轴Oxh与水平面之间的夹角γ叫航迹俯仰角,飞行方向向上,γ为正,此时的航迹俯仰角又叫上升角。
平移地面坐标系,使其原点与飞机质心重合时,航迹坐标系、速度坐标系和地轴坐标系之间的方位关系如图3所示。依次使地轴系绕Oyg、Ozh轴转过ψs、γ角可使地轴与航迹轴系重合。

图3 地轴系、速度坐标系、航迹轴系的方位关系
2.1.2 欧美坐标系
由于坐标系定义的方式不同,欧美坐标系下各飞行参数的正方向和苏联坐标系也存在不同,具体如下:
俯仰角 以抬头为正;
偏航角 以机头右偏航为正;
滚转角 以向右倾斜为正;
航迹俯仰角 以向上飞行时为正;
航迹方位角 以速度在地面的投影在Ox轴右侧为正;
航迹丨转角 以右倾斜为正;
迎角 以速度的投影在Ox轴之下为正(Oy轴定义指向地心为正);
侧滑角 以速度矢量处于对称面的右方为正。
2.1.3 飞行参数正方向对比
为了明确飞行器各参数在不同坐标系下定义的异同,各参数在两种坐标系下的对比如表1所示。

表1
2.2 舵面极性定义
飞行器飞行操纵最基本的气动舵面是升降舵、副翼和方向舵。由于可动鸭翼、可动边条翼等多翼面布局气动布局的出现,飞行器的控制舵面种类很多。为了工程应用方便,在飞控系统系统设计时,一种常见的处理方式是把其它种类的气动舵面向这三种基本舵面进行等效转化。例如,飞翼无人机阻力式方向舵和翼尖方向舵一般等效为方向舵;增升襟翼一般等效为升降舵;联动鸭翼等效为升降舵;联动-差动鸭翼等效为升降副翼;机翼后缘的具有多片气动舵面,且既可以联动又可以差动时,一般根据控制需求分别定义为一级升降副翼、二级升降副翼等多级舵面。
通过以上等效转化,不同气动布局的飞行器可以按照统一的气动构型进行控制系统设计、半物理仿真等设计和验证工作,降低了设计时建模的工作量。
根据工程经验,一般需要明确定义升降舵、副翼和方向舵这三种气动舵面及其极性。一般气动舵面的定义是依据物理意义,由通过风洞试验和CFD建立气动数据库的部门进行定义并撰写该飞行器气动数据库的使用方法。一种常见的定义方式如下:
升降舵 定义升降舵后缘下偏为正。对于静稳定性飞机而言,正的升降舵产生低头力矩;
副翼 定义右副翼后缘下偏(左副翼后缘上偏)为正。正副翼使得飞行器左偏航和左滚转;
方向舵 定义方向舵后缘左偏为正。正方向舵产生左偏航力矩,消除右侧滑。
3 坐标系的统一性和建立的依据
3.1 欧美坐标系和苏联坐标系牛顿力学体系下的统一
从欧美坐标系和苏联坐标系的定义可知,这两种坐标系定义最大的不同是Oy轴的正方向不同。虽然两种坐标系的Oy轴正方向完全相反,但是,Ox轴的定义则相同。除此之外,欧美坐标系和苏联坐标系另一个相同之处是都采用右手坐标系进行定义。这样的定义方式体现出这两种坐标定义方式在牛顿力学体系下的统一性。
在飞行器设计领域,无论是六自由度运动方程的建立,还是风洞实验中气动系数的获得,所依据的都是牛顿动力学理论,以及在牛顿力学基础上延伸出来的分析力学(拉格朗日力学)和欧拉力学[9~11]。牛顿力学又被成为矢量力学,后来,笛卡尔建立的坐标系与牛顿力学结合起来,成为了研究矢量力学的重要工具[12,13]。
在牛顿矢量力学中,描述物体运动的自然坐标系从根本上奠定了笛卡尔坐标系和牛顿力学相结合的方法和牛顿力学体系运动矢量(如速度、角速度、加速等)方向的定义方法。物体运动矢量不仅要描述运动速度的大小,还要描述物体运动速度方向的改变。在自然坐标系中,轨迹的切线矢量表示运动速度和方向,方向变化率则通过轨迹的曲率变化表示。自然坐标系是按照物体运动轨迹曲线的弯挠自然趋势而建立的一种表示方式,贴切、自然的反应了物体运动所有的特性。
自然坐标系的建立过程如下:运动曲线上的一点P,在该点处的切线为PT。同时,和P相邻的点P’的切线为P’T’。一般而言,这两条切线不在同一平面内。过P点做平行于切线P’T’的直线PT1,则切线PT和直线PT1确定了一个平面α1。当点P’无限接近P点时,平面α1则趋近于某一极限平面α。平面α为曲线点P的密切面。
在密切面内,过点P做切线PT指向曲线曲率中心的垂线PN,则PN为该点处的主法线。过点P做切线PT和主法线PN的垂直PB,则PB为该点处的副法线。矢量PB的方向由切线矢量PT和主法线矢量PN叉乘后的矢量方向确定。因此,切线、主法线、副法线就成为自然坐标的三维基坐标。从自然坐标系建立过程可知,在自然坐标系中的切线、主法线、副法线天然的形成了右手坐标系。
一般认为,笛卡尔坐标系思想成熟于1634年~1644年。在这段时间里,笛卡尔发表了《屈光学》、《气象学》、《几何学》、《科学中正确运用理性和追求真理的方*论法**》(简称为《方*论法**》)、《哲学原理》等著作,全面阐述了坐标系思想和几十种常见的坐标系。坐标系作为数学工具并没有左手坐标系和右手坐标系的分别,甚至坐标轴也并非一定要相互垂直,有时候,在非垂直坐标系中可以更方便的描述数学问题。
牛顿力学的建立的标志是1687年出版的《自然哲学的数学原理》(拉丁文:Philosophiae Naturalis Principia Mathematica.英文名称:Mathematical Principles of Nature Philosophy)。这本具有划时代意义的力学著作的论述和证明方法主要是几何学以及微积分思想。坐标系力学的结合还在该著作发表之后。因此,从时间上而论,笛卡尔的坐标系建立的时间要早于牛顿力学。
但是,由于牛顿力学所描述的物体运动具有天然的自然坐标系属性,人们在将坐标系作为一种工具描述牛顿力*运学**动时,很自然的继承了自然坐标系的思想建立了右手坐标系。此后,力矩、旋转运动等力*运学**动量矢量方向的定义以及欧拉旋转力学的定义等等,都是在右手坐标系下进行的。此时,右手坐标系成为了描述物体运动最常用的坐标系。
由于物体的旋转矢量的定义是在右手坐标系下根据右手螺旋法则定义的。在描述物体的旋转运动时右手坐标系成为了最简单、方便的形式。飞行器的运动是具有六个自由度的平移加旋转运动,描述其运动的方程比较复杂。因此,坐标系的定义就显得尤为重要。我们比较常见的两种坐标体系:苏联坐标系和欧美坐标,虽然把垂直平面内的正方向定义不同,但是都遵循了牛顿体系的基本规律,建立右手坐标系。这就是苏联坐标系和欧美坐标系在牛顿力学体系下是统一的。
正是因为苏联坐标系和欧美坐标系这种在牛顿力学体系下的统一性,两种坐标系下描述飞行器飞行运动的六自由度运动方程才具有相同的表现形式。也正是这种统一性,两种坐标体系下的飞行器各种参数才具有直观可比性。
3.2 欧美坐标系和苏联坐标系建立的依据
在上一章节中,论述了欧美坐标系和苏联坐标系在牛顿力学体系下的统一性。既然两种坐标系是统一的,那么为什么还要建立两种不同的坐标系,并且都得到了广泛的认同和应用呢?
为了回答这个问题,先介绍力学中应用坐标系描述物体运动的基本原则:
1 符合人们的日常观念
该原则要求建立的坐标系应当尽可能的符合人们的日常观念。例如,飞行器坐标系中轴的建立,主要依据就是人们的观念。
2 运动方程的形式尽可能的简单
物体运动在不同坐标系下具有不同的动力学方程表现形式。这些不同坐标系下的方程在建立难易程度和复杂程度上差别很大。因此,在建立坐标系时,应当尽可能的使得运动方程形式简单。
3 沿某一固定受力方向建立坐标轴
该原则本质是和原则2相似的。一般情况下,沿着固定力方向建立坐标轴可以使方程形式更加简单。
根据以上原则我们来分析苏联坐标系和欧美坐标系建立的依据。两种坐标的轴的建立主要是根据人们的日常观念和认识习惯。两种坐标系最大的不同是垂直方向上轴的方向。
苏联坐标系定义Oy轴的方向向上。这主要是因为飞行器的飞行是从地面的原点开始向上飞行的。这种将Oy轴的方向定义为向上的方式符合人们日常的认识,人们也比较容易接受。因此,苏联坐标系是依据原则1建立的。
欧美坐标系定义Oy轴的方向指向地心。这种定义方式的主要依据是在飞行器受到的各种作用力中,只有重力的大小(忽略燃油的消耗)和方向是固定不变的。因此,沿着该固定受力方向建立坐标轴可以使运动方程形式更加简单。因此,欧美坐标系建立的依据是原则2和原则3。
因此,苏联坐标系更加符合人们的认知习惯,而欧美坐标系则使得运动方程最简单。可以说,这两种坐标体系各有千秋。
4 坐标系的影响
4.1 坐标系对运动方程的影响
在上一章节中,介绍了苏联坐标和欧美坐标系在牛顿力学体系下的统一性和建立的依据,说明两种坐标体系下的运动方程形式的一致性。本章节主要介绍两种不同坐标系对运动方程的具体影响。
牛顿力学定理指出,力是物体运动的原因。因此,建立物体运动模型的基础是受力分析。在分析力学中,受力分析之后则是物体自由度分析。物体运动的自由度决定了该物体运动方程中独立方程的个数。
在各种参考图书和论文中,常常可以见到关于飞行器的运动是六自由度的以及12个微分方程的具体形式。六自由度和12个微分方程的具体形式似乎和自由度决定独立方程个数的论断相冲突。接下来介绍这对看似矛盾背后的原因。
飞行器的运动确实是六个自由度,这是确定无疑的。这六个自由度分别是三维空间的自由平移和绕三个坐标轴的自由旋转。因此,根据分析力学的可知,描述飞行器运动的独立方程个数应该为6个。结合牛顿力学和欧拉力学可知,这六个独立的方程应分别为三个轴向上的加速度方程和角加速度方程。
然而,常见到飞行器运动方程为12个,这12个方程分别是:3个轴向上的位置方程、3个轴向上的速度方程、3个轴向上的旋转角度方程和3个轴向上的旋转角速度方程。不过,这12个方程之间并不是相互独立的。其中,3个轴向上的位置方程、3个轴向上的速度方程是由三维空间的三个自由平移自由度决定,分别是三个轴向上的加速度方程的二重积分和积分形式。3个轴向上的旋转角度方程和3个轴向上的旋转角速度方程是由三维空间的三个自由旋转自由度决定,分别是三个轴向上的角加速度方程的二重积分和积分形式。因此,这12个方程依然是6个自由度。
飞行器的位置和速度方程一般是在惯性坐标系下建立的,这是人们通常认识的结果。而旋转角度和角速度方程的描述常用的有体轴系和速度轴系两种方式。这两种不同的描述方式则是对应不同的飞行性能和控制器设计不同的需求。
一般而言,战机滚转机动的滚转轴是机体轴。如果战机绕着机体轴滚转,则设计时就需要在机体轴下描述战机的转动。但是,战机在绕机体轴进行滚转时会发生迎角和侧滑角交替转化的现象,如图4所示。当不考虑俯仰与偏航阻尼力矩时,迎角与侧滑角等幅相互转化。此时,当战机滚转90度时,迎角将等值转化为侧滑角。侧滑角的出现使得战机的升力急剧减小、飞行高度降低、甚至难以控制而失稳。这就是运动耦合现象。
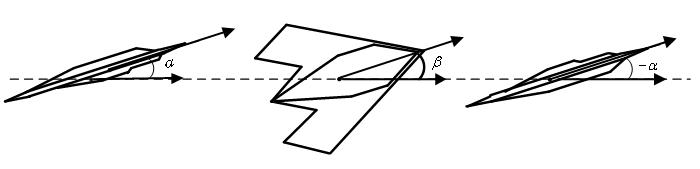
图4 滚转机动时迎角和侧滑角转化现象
随着对战机机动能力需求的不断提高,战机的机动能力也随之变强。绕机体轴滚转而产生的迎角和侧滑角交替转化的运动耦合影响问题则变得十分突出。为了克服该问题,于是提出了战机绕速度轴滚转的机动方式。这种绕速度轴进行滚转的机动方式,在设计时就要求在速度轴下描述战机的旋转运动。
虽然战机绕速度轴滚转克服了运动耦合现象,但是,这种机动方式则带来了惯性耦合问题。战机绕速度轴滚转时,由于战机的滚转轴和机体轴不重合,在滚转时则会产生惯性耦合力矩。而且,惯性耦合力矩的大小与二倍迎角的正弦值成正比。
4.2 坐标系对气动参数的影响
苏联坐标系和欧美坐标系定义方式存在不同,在欧拉动力学里,这种坐标系的不同被描述为坐标系的旋转。于此相对应的,两种坐标系之间则存在一个对应的旋转变换矩阵。通过该旋转矩阵,可以实现两种坐标体系的变换。这种通过旋转矩阵实现欧美坐标系和苏联坐标系变换的方式优点是数学上比较严谨,缺点就是理解起来比较困难。
其实,从牛顿矢量力学的角度出发也可以实现两种坐标系的统一和满足工程上应用。这种方法需要有明确的物理概念和对飞行器受力情况的清晰认识,从受力和运动的角度分析运动的形式。
飞行器的运动是力和力矩作用的结果,因此,对飞行器的受力大小和方向都应有清晰的认识。在受到的各种力和力矩中,重力和发动机的推力方向是不变。其它的空气动力产生的气动力和力矩则是改变的。并且由于欧美坐标系和苏联坐标系定义方式的不同,这些力和力矩的正负形式也不同。
下面以常规静稳定型飞机,2.2节舵面偏转的定义方式下,各气动参数增量形式,单一舵面正向情况下苏联坐标系和欧美坐标系下的正负情况对比如下表2。
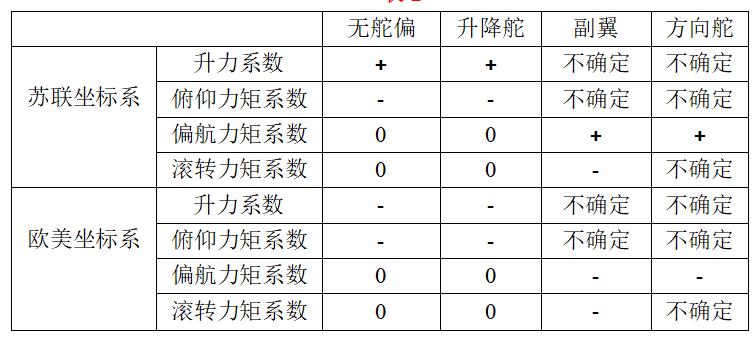
表2
注:气动数据库有很多种不同的形式,使用时一定按照气动数据库配套的数据库使用方法进行使用。
4.3 对稳定性判定的影响
在飞行动力学和飞行控制领域中,常把飞行器的稳定性定性分为静稳定性与动稳定性两大类。需要说明的是,该稳定性判据是在气动参数极性和坐标系定义方式匹配的前提下进行的。因此,在判断飞行器的稳定性之前,要首先确认气动参数的极性是否和飞行器所采用的坐标系相匹配。
静稳定性是指飞行器在配平状态下受到扰动后,扰动消失的瞬间飞行器恢复原平衡状态的趋势。动稳定性是指飞机在配平状态下受到扰动,扰动消失后,飞机自动恢复原平衡状态的能力。因此静稳定性不是真正的稳定性,具有静稳定性的飞机,不一定具有动稳定性,但是通常静稳定性是飞机动稳定性的前提,特别是静稳定性与相应的飞机静操纵性具有密不可分的关系。
运动状态的改变和恢复都是受到力或者力矩的作用。飞行器具有稳定性的根本原因是扰动使得飞行器状态改变之后,产生了使得飞行器状态改变的反作用效果。在明确了坐标系对气动参数极性的影响之后,接下来讨论不同的坐标系下对飞行器稳定性判定条件的影响。
在纵向,飞行器的受到扰动最先引起的状态改变是俯仰角。因此,纵向静稳定性稳定一般用俯仰角稳定性来评价。
受到扰动后飞行器的俯仰角改变速度是空速矢量方向改变速度的十倍以上。根据时标分离原理,工程上一般认为俯仰角和空速矢量方向的改变是在不同时间维度上进行的。因此,在扰动发生的瞬间,可认为飞行器的俯仰角和迎角是等值改变的。
俯仰角恢复的根本原因是产生反作用的俯仰力矩,而俯仰力矩的产生是由迎角的改变引起的。因此,判断飞行器纵向是否静稳定就要判断俯仰力矩系数和迎角的变化关系。从4.2节可知,在两种坐标系下,飞行器的俯仰力矩系数具有相同的极性。因此,两种坐标体系下对纵向静稳定的判定标准相同。
如图5所示,当俯仰力矩系数随迎角的变化率mzα<0时,飞行器具有迎角静稳定性;mzα>0时,飞行器为静不稳定;mzα=0时,飞行器为中立静稳定。
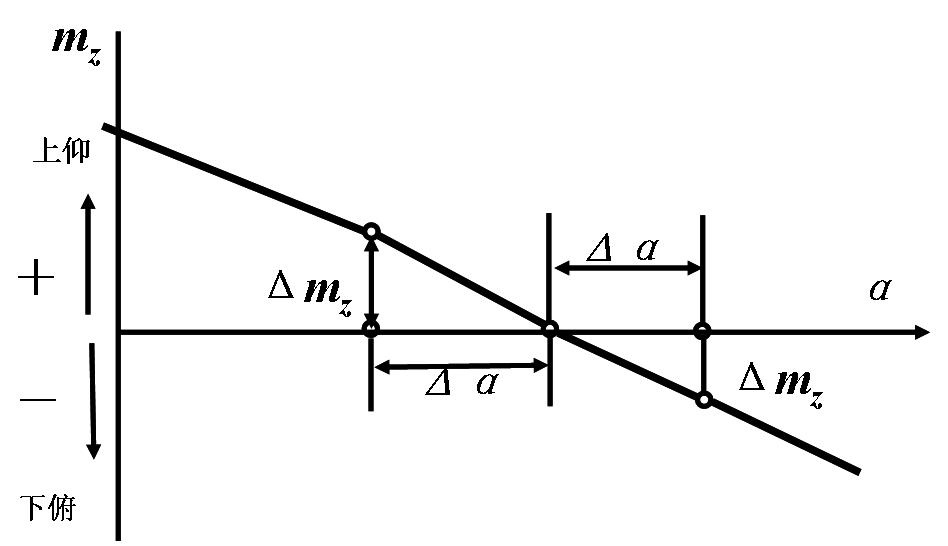
图5 俯仰力矩系数与迎角的关系
飞行器的横侧向静稳定性可分为方向静稳定性和横向静稳定性。
方向静稳定性是指飞行器受到扰动偏离原方向平衡状态产生侧滑角△β,在扰动消失瞬间飞机自动恢复原平衡状态的趋势。飞行器是否具有方向静稳定性,取决于它的偏航力矩特性。由于侧滑角定义的极性在两种坐标系下不同,因此,其方向静稳定性的判定标准也不同。
在苏联坐标系下,偏航力矩系数和侧滑角之间的变化关系如图6所示。其判定准则如下:
小于零 飞行器具有方向静稳定性,或称方向静稳定;
大于零 飞行器不具有方向静稳定性,或称方向静不稳定;
等于零 飞行器方向中立静稳定。
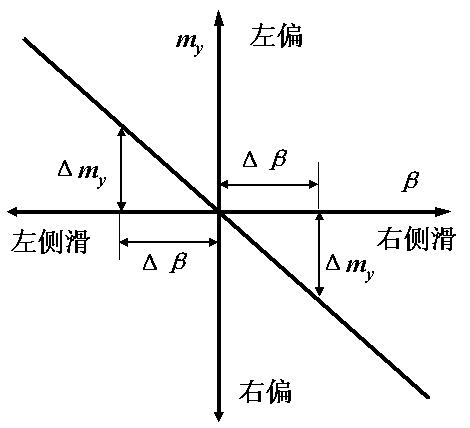
图6偏航力矩系数与侧滑角关系
欧美坐标系下其判定准则如下:
大于零 飞行器具有方向静稳定性,或称方向静稳定;
小于零 飞行器不具有方向静稳定性,或称方向静不稳定;
等于零 飞行器方向中立静稳定。
横向静稳定性是指飞行器受到扰动偏离原横向平衡状态产生坡度,在扰动消失瞬间飞机自动恢复原横向平衡的趋势。飞行器是否具有横向静稳定性,取决于滚转力矩系数随侧滑角的变化特性。由于侧滑角定义的极性在两种坐标系下不同,因此,其方向静稳定性的判定标准也不同。
在苏联坐标系其判定准则如下
小于零时,飞机横向静稳定,或者称飞机具有横向静稳定性;
大于零时,飞机横向静不稳定,或者称飞机不具有横向静稳定性;
等于零时,飞机横向中立静稳定。
在欧美坐标系其判定准则如下
大于零时,飞机横向静稳定,或者称飞机具有横向静稳定性;
小于零时,飞机横向静不稳定,或者称飞机不具有横向静稳定性;
等于零时,飞机横向中立静稳定。
在应用时,有几下几点需要注意:
1 根据本文坐标轴的定义标准,两坐标系变换的向量坐标为。
2 在建立运动模型时,应当采用同一坐标系定义方法。即如果选用苏联坐标系,则地面惯性系、体轴系、机体系、速度系、航迹系都应是苏联坐标系定义。避免苏联坐标系和欧美坐标系混用的情况。
3 现实的物理空间都是三维的,因此,需要变换的物理量也应是以三维列向量的形式出现。具体飞行器相关学科领域,则是以三维位置向量、三维速度向量、三维姿态角、三维角速度的形式进行变换。
4 坐标系的旋转变换和同一体系下不同坐标系间的变换在物理意义和变换矩阵形式上存在很大的不同,且不可混为一谈。在很多教材中,都可以看到运动方程从体轴系向速度系、速度系向体轴系的变换矩阵。虽然这种变换的绕X、Y、Z三个基本坐标旋转的基本转换矩阵和式(1~3)相同,但是,其最终变换矩阵确和式(5)不同。物理意义更是相差巨大,感兴趣的可参考相关理论力学的欧拉力学的相关部分。
5 常用设计软件对坐标系选择的影响
5.1 控制系统设计常用软件和编程方法优缺点分析
对于飞行器设计而言,最常用的设计软件是C/C++和Matlab两种工具。其中,Matlab软件有提供M语言编程和Simulink模块化编程两种方式。同时,Simulink模块化编程方式还提供了S-function和M-function等模块,使得设计时可以和M语言相结合,实现更加灵活、高效的设计工作。
C/C++和Matlab软件的 M语言编程形式是相似的,都是根据软件的书写规则,设计相应的程序结构并书写代码。Matlab软件的Simulink模块化编程主要是应用软件提供的各种模块进行搭建仿真系统。同时,Matlab软件的Simulink模块还提供了各种学科的工具包,可以方便的满足各学科模块化设计的需求。对于飞行器设计而言,常用的Simulink工具包有航空模块工具包,数学模块工具包等等。
C/C++软件最大的优点是方便后期的半物理仿真和硬件的结合,缺点是软件提供的数学函数较少,各种数*运学**算需要开发者编写。
Matlab软件作为一款专用的数学工具软件具有较强的数据运算能力,并且提供了大量的运算函数。该软件提供的运算函数基本可以满足各学科设计的需求。因此,编写效率较高。缺点是这种设计方式和后期的半物理仿真和硬件的结合比较麻烦,编写的程序文件需要通过相关程序转化为C语言文件,执行效率较低。
5.2 常用软件对坐标系选择的影响
在Matlab软件的Simulink模块中,提供了一个专门的航空模块工具包,如图7所示。在该航空模块中,还包括执行机构模块、空气动力模块、环境模块、动力学方程模块等等。合理的应用这些模块,可以完成飞行器设计的大部分工作。
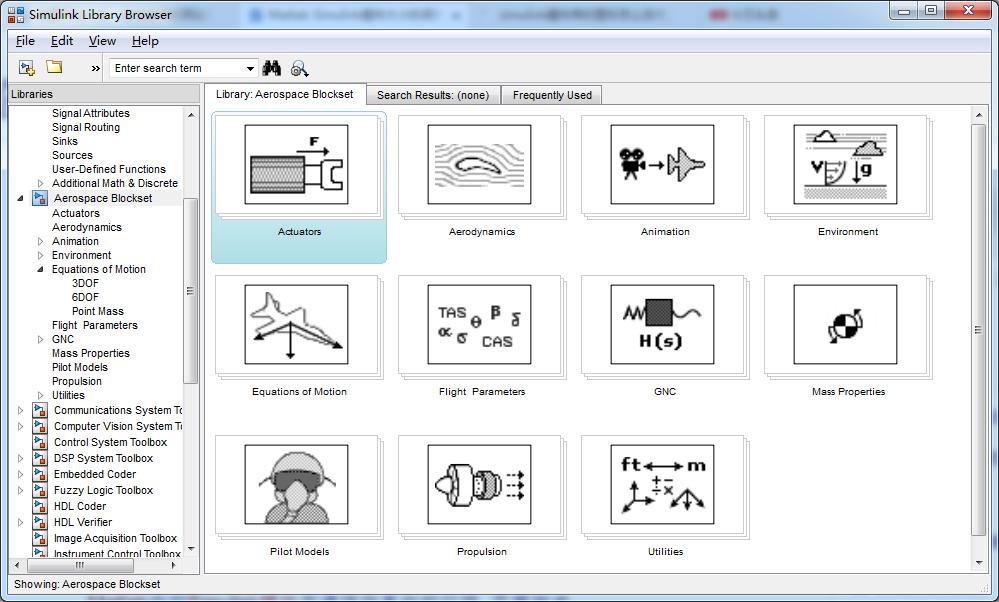
图7 航空模块工具包
飞行器仿真模型和控制系统设计核心的部分是运动方程的建立。Matlab软件的Simulink模块的航空工具中,提供飞行器运动的三自由度模块和六自由度模块,如图8所示。
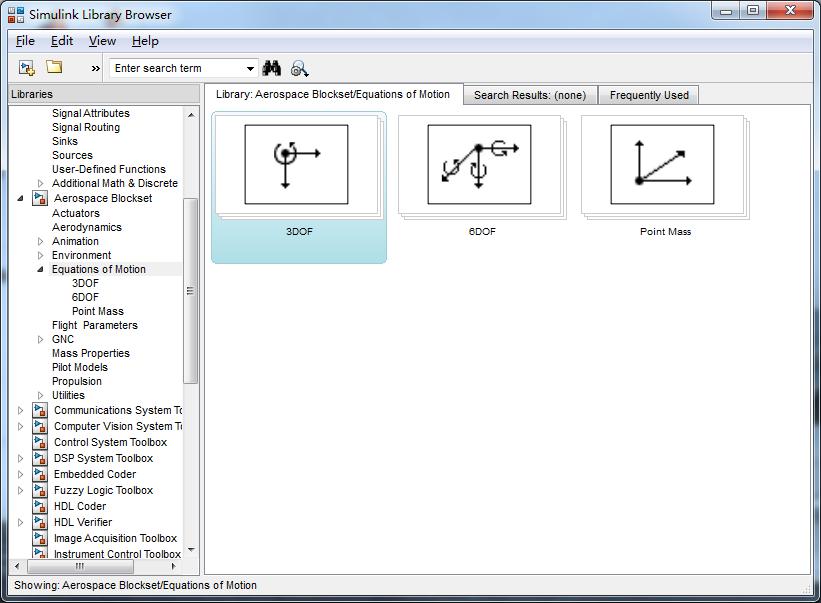
图8 MATLAB提供的飞机运动模块
这些运动方程包含了机体坐标系和航迹坐标系下的运动方程。其中,六自由度运动方程包含了设计需求所有的方程形式,可以满足不同的设计需求。六自由度运动方程工具包如图9所示。
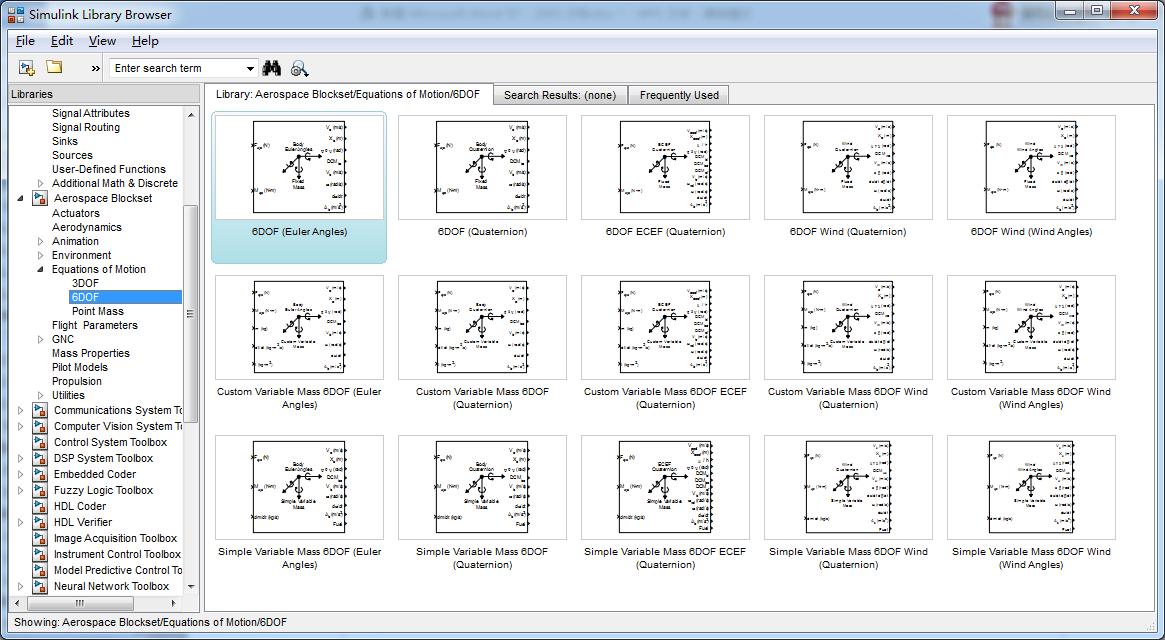
图 9 MATLAB提供的飞机运动模块
通过合理的利用航空模块可以方便的建立飞行器的运动模型,减少建模的工作量,快速实现工程设计目标。
但是,MATLAB软件航空工具包中提供的各应用模块都是基于欧美坐标系建立的。因此,在应用航空模块进行设计时,就要注意坐标系的统一和转换。
另外,在飞行器设计领域,越来越多的学者开始接受欧美坐标系。这一方面是因为应用Matlab软件进行建模和设计时方便,另一方面也是为了和国际接轨,方便同行间的学术交流。
6 坐标系选择的一些建议
在航空相关领域,苏联坐标系和欧美坐标系是两种经过长时间和大量时间验证,非常方便的坐标系定义方式。它们的定义和表现形式都满足运动学的相关准则并有效的工程实践的要求。通过前文的分析我们知道,这两种坐标体系有很多相似之处,在科学研究和工程应用方便都可以使用。
但是,从第6部分“常用设计软件对坐标系选择的影响”介绍可知,现在工程设计常用的Matlab提供的航空应用工具包是以欧美坐标系为标准进行编写的。Matlab软件是航空设计领域应用最为广泛的一款软件。为了方便和工程接轨,从方便应用的角度出发,建议学习过程中建议选用欧美坐标系。
另外,从科学研究角度出发,也建议选用欧美坐标系。目前,学术界最具影响力的期刊都被美国《科学引文索引》(Science Citation Index, 简称 SCI )和美国《工程索引》(The Engineering Index,简称 EI)收录。这两大索引所收录的期刊和论文大多是以英文作为写作语言。为了方便学术交流、和世界接轨,也建议采用欧美坐标系。
但是,由于欧美坐标的定义方式有悖于人们日常观察飞行器向上飞行的直观观念,这就造成了和相关学科结合时,坐标系的不匹配的问题。例如,飞行力学和飞控控制学科中常用到的气动数据库。气动数据在建立其实也暗含了坐标系的定义问题。由于建立气动数据库时没有明确的规定坐标系的方式,因此,在建立三维CFD模型或者风洞试验过程中,研究人员根据日常观念,很自然的采用了苏联坐标系。
飞行系运动模型的欧美坐标系和气动数据库苏联坐标系的匹配,则会带来一系列的问题。比如,稳定型判定问题、运动模型建立时的受力分析等等。这些问题的解决一方面要求气动数据库的建立者出具详细的数据库各力(力矩)的方向定义和该数据库的使用方法。另方面,也要求气动数据库的使用者认真阅读气动数据库的相关说明,必要的时候需要作出调整,以适应自己建立运动模型时所选择的坐标体系。
就普通教学而言,苏联坐标系更加容易被学生所接受。
参考文献
[1] 陈廷楠. 飞机飞行性能品质与控制[M]. 国防工业出版社, 2007.
[2] 李洪儒. 导弹制导与控制原理[M]. 科学出版社, 2016.
[3] 雷虎民. 导弹制导与控制原理[M]. 国防工业出版社, 2006.
[4] 曾庆华. 无人飞行控制技术与工程[M]. 国防工业出版社, 2011.
[5] 张明廉. 飞行控制系统[M]. 国防工业出版社, 1984.
[6] GuillaumeJ.J.Ducard. 容错飞行控制与导航系统[M]. 国防工业出版社, 2012.
[7] 章卫国. 现代飞行控制系统设计[M]. 西北工业大学出版社, 2009.
[8] 朱宝鎏. 无人飞机空气动力学[M]. 航空工业出版社, 2006.
[9]梁昆淼. 力学:理论力学[M]. 高等教育出版社, 2009.
[10] 范钦珊, 陈建平. 理论力学.第2版[M]. 高等教育出版社, 2010.
[11]朱照宣. 理论力学. 上下册[M]. 北京大学出版社, 1982.
[12] 艾萨克・牛顿, 牛顿, 曾琼瑶,等. 自然哲学的数学原理[M]. 江苏人民出版社, 2011.
[13]笛卡尔. 笛卡尔几何[M]. 北京大学出版社, 2008.