

今日推荐
高工机器人CEO圈群招募中,欢迎感兴趣的朋友们加微信号:13632944360入群;添加微信时请备注单位-姓名-职务,通过审核后我们将邀请进群。
本文总计
2531
字
读完共需
5
分钟
伴随着工业4.0时代的到来,人工智能技术的逐渐成熟,机器人行业的发展迎来了春天。其中,AGV(Automated Guided Vehicle)的增势迅猛,显得尤为突出,其产品层出不穷,在汽车工业、家电制造、电商仓储物流、*草烟**等领域得到广泛的应用。
AGV作为物流自动化的主体,正在朝着更加智能化、无人化的方向演变,其导航技术的不断发展与创新是一个非常值得关注的话题。
■ 五种导航三代技术
基于整个智能制造的发展,市场上较常见的导航方式通过技术大致可分为三代:第一代是电磁和磁导航,第二代是现在行业主流的二维码导航,第三代分为两大类,分别是基于激光与视觉的两种 SLAM 算法导航。
第一代导航技术主要是被动的接受信息,较为传统,需要对应用场景进行改造。如电磁导航,其导航原理是在AGV行驶路径上埋置金属线,然后给金属线加载导航频率,通过AGV上的电磁感应线圈来感应磁场的强弱,进行识别和跟踪。这种导航的方式优点是不易破损、污染,成本低,缺点是路径固定,不易改造。
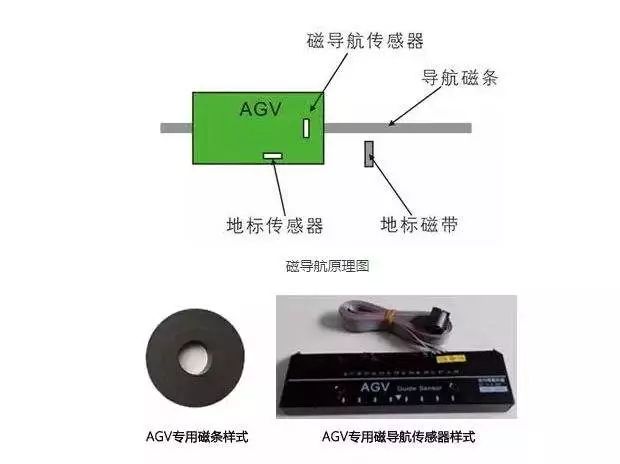
磁导航与电磁导航技术接近,不同在于其采用贴在路面的磁条替代埋置在地面下的金属线,通过磁场传感器检测磁带信号控制导航,在拐弯或特定的位置可以配合RFID技术识别感应,实现精确导航。这种导航方式成本低,线路稳定,缺点是易污染和破损,容易受外界的影响。此技术也是目前运用最为广泛,最成熟的导航技术之一。
第二代导航技术在第一代的基础上进行完善,二维码导航需要AGV识别周围标志信息,利用AGV子系统计算分析其所处位置,以无线通信的方式反馈给中心电脑,进而对AGV整体规划和调度。二维码导航优点是定位精度高,灵活性好,对声光无干扰。缺点是成本高,对陀螺仪的精度要求高。
近些年来,受益于二维码材质的更新换代等原因,以前的二维码需经常更换的问题已经解决,例如马路创新的二维码技术已经可以达到即使有50%到75%的破损度也可进行识别。

■ 殊途同归的第三代技术
重头戏就是第三代,目前在资本市场,各类机器视觉与激光雷达一片火热。截至2018年10月,已经有近十家机器视觉公司完成千万级融资,而在几天前,激光雷达企业速腾聚创完成由菜鸟、上汽、北汽投资的行业单笔最大融资——3亿。
SLAM(SimultaneousLocalization And Mapping),即同时定位与地图构建, SLAM技术对于机器人或其他智能体的行动和交互能力至为关键,因为它代表了这种能力的基础:知道自己在哪里,知道周围环境如何,进而知道下一步该如何自主行动。可以说凡是拥有一定行动能力的智能体都拥有某种形式的SLAM系统。
在未来的各类SLAM算法导航中,基于激光雷达的激光SLAM和基于机器视觉的视觉SLAM(VSLAM)是两种研究最多、最可能大规模落地应用的SLAM,基本代表着第三代AGV导航技术的发展方向。
在这两种SLAM导航方式中,目前应用较多的是激光SLAM,激光SLAM脱胎于早期的基于测距的定位方法(如超声和红外单点测距)。激光雷达距离测量比较准确,误差模型简单,在强光直射以外的环境中运行稳定,反馈信息本身包含直接的几何关系,使得机器人的路径规划和导航变得直观。激光SLAM理论研究也相对成熟,落地产品更丰富。

VSLAM,它可以从环境中获取海量的、富于冗余的纹理信息,拥有超强的场景辨识能力。早期的视觉SLAM基于滤波理论,其非线性的误差模型和巨大的计算量成为了它实用落地的障碍。近年来,随着具有稀疏性的非线性优化理论(Bundle Adjustment)以及相机技术、计算性能的进步,实时运行的视觉SLAM已经不再是梦想。
■ 算法难度与计算需求
而在算法难度与计算需求,VSLAM难于激光SLAM。这里就要谈到一点,基于谷歌的开源模式,2016年已经推出了一整套的激光雷达解决方案,通俗的讲就是给激光SLAM构建了一个基础平台,可以在上面进行二次开发,一定程度属于站在巨人的肩膀看世界,相对来说就会容易一点。
反观视觉SLAM,首先图像处理本身就是一门很深的学问,基于非线性优化的地图构建上也是非常复杂和耗时的计算问题。实际环境中又需要通过优化和改进现有的视觉SLAM框架,比如加入光照模型、使用深度学习提取特征点以及使用单双目及多目融合视角等技术。这也是视觉SLAM进一步提升性能和实用性的必由之路。
计算需求方面,主流的激光SLAM可以在普通ARM CPU上实时运行,而视觉SLAM基本都需要较为强劲的准桌面级CPU或者GPU支持。但业界也看到了这其中蕴藏的巨大机会,为视觉处理定制的ASICS市场已经萌发。例如Intel旗下的Movidius,进行图像、视频与深度神经网络的处理,在瓦级的超低功耗下达到桌面级GPU才拥有的吞吐量。
■ 地图 构 建与累计误差
地图构建上,激光SLAM的特点是单点和单次测量都更精确,但地图信息量更小;视觉SLAM特别是通过三角测距计算距离的方法,在单点和单次测量精度上表现总体来讲不如激光雷达,但可以通过重复观测反复提高精度,同时拥有更丰富的地图信息。
累计误差方面,激光SLAM总体来讲较为缺乏回环检测的能力,累计误差的消除较为困难。而视觉SLAM使用了大量冗余的纹理信息,回环检测较为容易,即使在前端累计一定误差的情况下仍能通过回环修正将误差消除。
■ 成本
相比于VSLAM,激光SLAM有一个最大的成本问题。激光雷达有许多档次,成本都高于视觉传感器。目前市面上最常见的SICK摄像头,单个价格几万块,其价格比高端的工业级摄像头和感光芯片贵出不少。虽然激光雷达量产后成本可能会大幅下降,但能否降到同档次摄像头的水平仍是一个大大的问号。

■应用落地
顺应生产模式的不断发展,AGV导航技术必然朝着灵活、柔性、智能演变,但是这并不代表着三代导航技术是互相替代的关系,在很长一段时间里三种方式会呈现共存状态,适用于在不同的应用环境中,比如有些工厂,更适合磁条这种高精度的安全成熟的应用技术,而在电商无人仓乃至于很多服务场景中,肯定会朝着第三代技术发展。
例如怡丰泊车机器人车库正式落户南*夫子京**庙地铁口,全球首创“激光导航+梳齿交换”方式,后台系统能实现1000辆AGV机器人同时调度,自动判断通道错车,调整移动速度及转向时间,让多台AGV同时运作实现最优化管理。同时,取车时间大大节省,实现2分钟全自动停取车。全场可以做到无人出现,大大降低了安全隐患,提高了停车效率。
目前来说,磁导航与二维码导航的应用最为广泛,第三代激光 SLAM也是比较成熟的定位导航方案,而视觉 SLAM 则是未来研究的一个主流方向。在无人化的仓储方面,由于环境简单,一般只会采用一种导航方式,而一旦牵扯到与人协同工作甚至于室外,多传感器的融合是一种必然的趋势。各种导航技术取长补短,优势结合,才能为市场打造出真正好用、易用的导航方案。
看完再顺手给“高工机器人”设个星标吧
操作方法如下:

2018年12月17-18日,由高工机器人举办的“利元亨•2018高工机器人年会暨阿童木机器人•高工金球奖颁奖典礼”将在深圳维纳斯皇家酒店(宝安沙井)举行,点击文章底部“阅读原文”报名。
往期推荐
↓↓↓点击“阅读原文”立即报名