不看不知道,看了吓一跳。人类迈开腿就走,机器人的走法却如此千奇百怪。
文/马兰
“机器人怎么走?”看多了科幻大片的人,肯定直接回答“迈开两条腿就走呗”。可是,哪那么容易!连人类步行都是通过全身上下数百块肌肉共同控制而完成的,少一块肌肉都迈不开腿!
 那么,没有肌肉的机器人是如何实现行走的呢?首先,来看看机器人千奇百怪的“走法”。
那么,没有肌肉的机器人是如何实现行走的呢?首先,来看看机器人千奇百怪的“走法”。
迈开腿就走的直立行走机器人
人类进化了几千年才实现直立行走,机器人就幸运多了。人类在设计时,通过参考人类模式直接给了某些机器人这种特权。比如,波士顿动力公司新推出的“Atlas”机器人,平衡能力已经和人类相差无几,可以潇洒自由行。
 据悉,这款机器人通过四肢和身躯的传感器维持身体平衡,再加上头部的激光雷达和立体视觉传感器帮助导航和避障,而且已能够适应户外和室内的环境。除了能够行走、取物,还能在户外穿越严酷地形,使用手脚攀爬,牛皮的是,在被击倒摔倒之后,还能够爬起来。
据悉,这款机器人通过四肢和身躯的传感器维持身体平衡,再加上头部的激光雷达和立体视觉传感器帮助导航和避障,而且已能够适应户外和室内的环境。除了能够行走、取物,还能在户外穿越严酷地形,使用手脚攀爬,牛皮的是,在被击倒摔倒之后,还能够爬起来。
更多机器人踩上了“滑板”——轮子
其他机器人与Atlas比起来,也许只能叫作“玩具”。但并不是每一个机器人都需要实现直立行走,有些厂家就直接为机器人装上了“滑板”——轮子,来实现机器人自由活动。

但是,轮子的多少和差异又让机器人呈现了不同的行走效果。现在的机器人轮子配置各有差别,有单轮、两轮、三轮、四轮、六轮的。

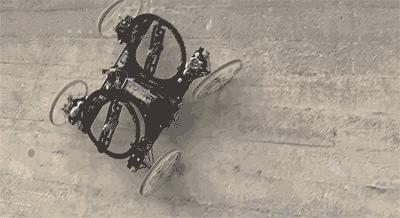
如连墙都不能阻挡的VertiGo机器人,就是四轮的。不仅可以在地上快速滚动,还可以像壁虎一样翻越障碍而且不靠脚的吸附作用来完成。
而Creadapt则是一个六轮机器人,能够在不同路况的地面上自适应的移动。在平地上它使用6轮活动,在遇到泥泞的地面,沙漠或者草地,甚至在机器人失去1~2条腿时,它能够自适应的改变自己行动模式,来保证行动自如。

风火轮OR 万向轮,哪种转动更灵敏?
那么,机器人的“滑板”是如何运作的呢?为什么有些机器人是可以自由回转身子,而有的机器人却傻傻地要绕一大圈呢?这与轮子的转动频率和类型有什么关系吗?轮子是像风火轮一样转动率,还是像日常看到的那种小平衡轮呢?是万向轮还是单向运作的?万向轮与全向轮又有什么差别呢?
的确,机器人如何转弯、行走,不仅与路线设计有关,还与轮子有关。比如全向轮与万向轮的机器人,其转弯方式和灵敏度就有很大差别。比如,机器人比赛多用的全向轮,而服务机器人多用麦克纳姆轮。

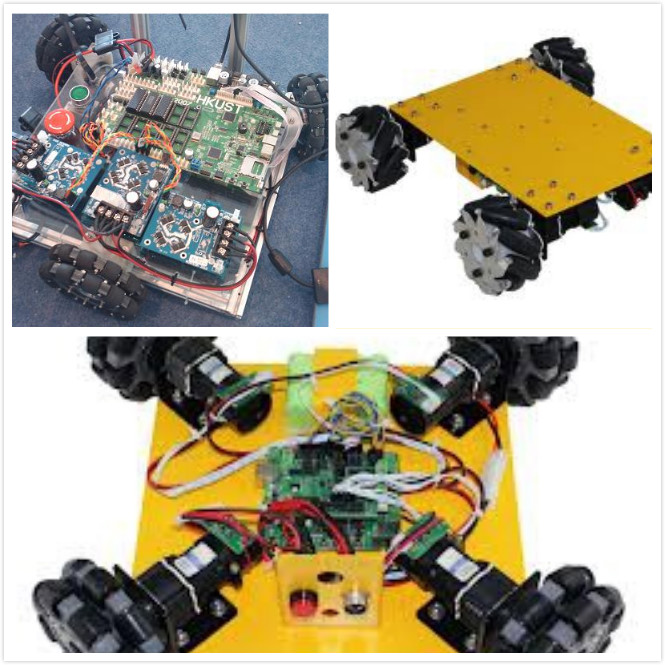
1973年,瑞士发明家Bengt Ilon发明可以任意自由方向移动的平台——麦克纳姆轮。在车轮外环中固定与轴心成45°的自由滚子,让车轮旋转时成45°排列的自由滚子与地面接触,地面会给予车轮与转轴夹45°的摩擦力,此摩擦力可为横纵分量,借由车轮的正反转或停止,改变横纵分量力的方向,可让平台做各种方式的移动。
简而言之,就是麦克纳姆轮是由多个滚子按照固定度数排列,如都与轴心成45°角,因此轮子在转动的时候不仅前后无障碍,也可以左右横向、斜角度前行或后退,且不会打滑。
现在有很多设计者采用这种方案,比如美克斯用在物流、*用军**上的设置。

而全向轮较为常见,括轮毂和从动轮,该轮毂的外圆周处均匀开设有3个或3个以上的轮毂齿,每两个轮毂齿之间装设有一从动轮,该从动轮的径向方向与轮毂外圆周的切线方向垂直。全向轮所有的转动部位都使用轴承,因此灵活快速,轴承的密封性相对不错,可以忍受沙子灰尘等干扰。而且,如果同时使用3个或以上的全向轮可以实现任意方向的平移,可以进行任何复杂的弧线运动。
有三轮全向、四轮全向和四轮麦轮等多种安装方式:
而万向轮,就是所谓的活动脚轮,它的结构允许水平360度旋转。脚轮是个统称,包括活动脚轮和固定脚轮。固定脚轮没有旋转结构,不能水平转动只能垂直转动。这两种脚轮一般都是搭配用的,比如手推车的结构是前边两个固定轮,后边靠近推动扶手的是两个活动万向轮。
现在也有公司开发了万向轮轮子机器人,这种机器人的转弯方式就会显得非常灵活,能实现自身转身,且转弯的弧度较小,占的空间较小。比如三宝平台机器人就采用了万向轮,在灵动性上比较容易博取用户好感。

现在,虽然轮子的研究发展已经较为成熟,但是机器人使用何种轮子技术并不局限于任何规则性,而且由于国内机器人技术发展程度还不成熟,目前很多机器人并不能实现理想的行走style。