作者 / Carlos
在今年的品牌日上,轻舟智航推出了基于Robotaxi的L4自动驾驶系统,降维而来的*四代第**量产车规级自动驾驶解决方案DBQ V4。 该方案的标准版本,仅有1个前向长距离半固态激光雷达、12个摄像头和6个毫米波雷达,综合测算成本已降至到1万元以内, 有能力随乘用车直接量产。
按照轻舟智航的说法,基于DBQ V4的硬件,可将Robotaxi的自动驾驶场景降维到L2级监管标准,落地在量产车上,实现L4级体验的城市+高速NOA方案。
AutoByte
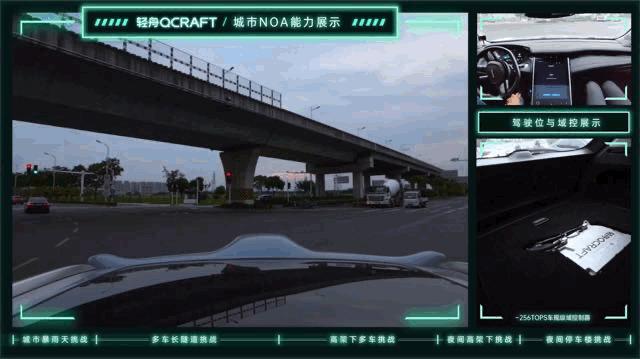
而在近日, 轻舟智航也首次公布了城市NOA的路试视频 。一辆搭载DBQ V4标准版硬件的测试车,在雨天和夜间的城市开放道路上,验证了该套系统的应对能力。
场景一:雨天行驶
雨天是自动驾驶系统挑战程度很高的场景之一,激光雷达和摄像头两个主要的传感器,都会因为雨雾受到比较严重的干扰。同时,感受城市结构化道路主要手段之一的车道线识别,也因积水覆盖住车道线更加困难,而多传感器融合能力、轨迹跟随算法,在这时就会非常重要。
在视频中,轻舟智航测试车经过了城市开放道路和十字路口、城市快速路、上下桥的大曲率匝道、被飞溅起的泥水遮挡住传感器等多个场景。轻舟智航对此均做到了比较流畅的应对,面对一些出现较*干高**扰和挑战的状况,也没有出现误判。

在城市道路跟车的期间,前方车辆被水面反射的倒影,存在让视觉系统当成第二辆车或者距离更近的误判可能,激光雷达发射出的一部分激光也可能被反射出去而无法接收,丢失很多路面信息,但测试车的表现和晴天状况没有太大区别。
测试车还遇到了前方车辆溅起大片积水的情况,这里也容易让激光雷达误识别成障碍物,做出紧急制动等误判。但轻舟智航的感知模型在不同阶段利用不同传感器信息相互补充,分辨出了这是水雾。
对此,轻舟智航联合创始人、CTO侯聪也强调了保留毫米波雷达的重要性:「在算法上,如果用视觉已经可以处理很好的情况下,我们是可以考虑去掉毫米波雷达的。 但这更多的还是一个技术问题,也就是能不能安全的去掉毫米波雷达,然后才是商业问题。 」

另外,测试车还经过了一段大曲率的环绕上桥匝道,这里比较考验系统的控制能力。而且,由于地面积水导致抓地力大幅下降,干地通行速度将会超过车辆的能力边界,需要做出场景化的调整,但测试车仍比较顺利的通过。
场景二:夜间行驶
轻舟智航还公布了一段夜间的测试,在这种场景里,主传感器之一的摄像头能力会大幅受限,如果存在一些corner case将会带来更大的挑战。因此, DBQ V4标准版也有一个激光雷达在这里就显得很有意义,可以在摄像头弱势场景,发挥出更强的冗余互补能力。

视频中,测试车遇到被两辆大车夹在中间,且左侧大车有并线挤压意图的情况。测试车在这种情况下,依靠摄像头无法得到完整的大车画面,甚至单摄像头内的画面都被大车的一部分挤满,识别和测距能力大大减弱,而通过激光雷达在3D感知能力上的优势,则能够清楚判断两侧物体的距离和运动趋势,给应对打下更好的基础。
场景三:隧道行驶
在视频中,轻舟智航测试车还经过了一段长达7公里的隧道。这种场景中,车辆运动的时候在相邻的地方得到的激光点云高度相似,对于纵向的定位的挑战较大。同时, 由于无法得到GNSS定位信号,只能通过高精地图、车辆实时的感知信息,以及惯性导航等技术去推断定位,也是自动驾驶中的一个主要挑战场景。

轻舟智航测试车在通过这条隧道时没有出现意外,不仅将车速保持在限速上限,面对一些并道车辆(对方侧道路是虚线),也顺畅进行了应对。
场景四:临停障碍车与主动变道
在城市开放道路上,遇到慢车、违停车辆,也是难以避免的情况。真实驾驶员对该类场景有时也会感到棘手,而自动驾驶系统对此则要做出难度更高轨迹预测和风险博弈。

轻舟智航在临近隧道出口的时候,遇到了一次比较极端的所在车道有临时停车的状况。由于出口处光线已经非常强,对于视觉摄像头的干扰比较严重,多传感器融合的优势在这里也可以发挥出来。
而且,轻舟智航的处理逻辑也比较成熟,视频中测试车所在的一侧车道线是实线,按法规不允许在正常情况下变道。但轻舟智航基本没有停顿,就比较果断的选择了绕行,变道和变道后加速的执行也很流畅。

另外,测试车在一次右转时还遇到了有停车的车辆占住右转车道。轻舟智航对此场景,没有把这些车当做是等待右转的车队,而是直接在左侧车道超越右转,甚至判断出一辆刚刚在车前停住的公交车是在停站,从而进行了超越。这可能也与DBQ V4将激光雷达和摄像头放在车顶,看得更远有关。
轻舟智航还介绍到,其 「时空联合规划算法」同时以空间和时间来规划轨迹,而不是先单独求解路径,在路径基础上再求解速度从而形成轨迹。 这种方案有两个优点:一是有更大的求解空间,能计算出来更多的开法,从而得到更好的行车轨迹;二是和人类开车逻辑更相似。
场景五:人车混杂的交通路口
在城市道路上,十字交通路口是人员参与度最高、规则最复杂,也是最容易出现corner case的场景。测试车在视频中,还遇到过自己在左侧两车道左转,而最右侧车道是掉头车道的一个路口。
测试车在正常通行时,也遇到了一个比较极端的被抢行状况。当时测试车在以正常车速左转,但遇到了掉头车辆加速在车前强行,而且刚刚超过一半,就急刹的情况。测试车对此的判断比较及时,强行车辆没有到车前就已经停止加速,识别到对方急刹时也及时的停了下来。
轻舟智航PNC负责人李栋也在采访中,解释了为应对corner case所做的工作:「 我们其实是minimize(减少)规则的,就是我们不会说先预设一些规则,规定在什么情况下要怎么办。这样一个更完备的算法,遇到不能处理的case就会非常少。 」
场景六:停车楼行驶
在视频最后,轻舟智航测试车还驶进了停车楼,并顺利的进到车位。测试车在停车楼内多次上楼,最终走到顶楼停进车位。在停车楼这种环境辨识度不高的场景,且没有做特殊的位置标识,想要完成代客泊车,对感知能力的要求也比较高。

目前,城市NOA已经开始成为部分量产车的主打亮点。但与很多从L2不断向上扩展的系统不同,轻舟智航从今年5月推出*四代第**前装量产方案DBQ V4,以及和地平线达成合作,仅用3个月就发布了城市NOA的路测视频。
据侯聪透露,能够做到这样的速度,实际与轻舟智航的降维模式有关:「城市NOA场景跟L4场景高度相似,作为一家L4公司,我们有非常丰富的经验处理这种场景,无论从系统设计、算法或背后的体系建设,都是很完备的。而L2公司原本解决的都是一些相对比较简单的场景,升维去做城市场景的时候,就会碰到重新建设系统的问题。」
根据规划,2022年第三季度,轻舟智航基于征程5芯片的自动驾驶样车,就会展开大规模路测;到2023年,该方案将达到量产水平。