李创武
保利长大工程有限公司
摘 要: 斜拉桥或悬索桥索塔是支承主索的塔形构造物,随着国内桥梁建造工艺的逐渐成熟,斜拉桥、悬索桥逐步向大跨径方向发展,同时索塔的高度也大幅提升,从而增加了高索塔高程传递测量的难度。为提高高索塔高程传递的测量精度,研究对比传统高程测量方法后,提出了高精度差分三角高程测量法。该方法采用0.5〞级全站仪自动测量并自动保存数据,旨在解决高索塔高程传递的测量精度问题,对提高高索塔三角高程测量方法的测量精度具有参考意义。
关键词: 斜拉桥;悬索桥;高索塔;差分三角高程;测量精度;
作者简介: 李创武(1989—),男,工程师,从事高速公路施工测量与测量技术研究。;
0 引言
三水三桥特大桥为52m+56m+72m+338m混合梁独塔斜拉桥(钢箱梁+混凝土梁),塔高168m。其中高索塔处于航道中间,距岸边大于500m。为测量塔顶各个构造物高程,必须由陆地水准点进行高程传递至塔顶。现场索塔高程比较大,采用高精度的测量方法是控制高程测量精度的关键因素。
1 传统高程测量方法
1.1 悬挂钢尺测量法
悬挂钢尺测量法的原理是利用高精度水准仪传递高程,由已知点精确测出高处结构物各目标点的高程。通过多次观测计算后,取平均值得到目标点的精确高程。
1.2 天顶距测量法
天顶距测量法比较便捷,原理是利用高精度全站仪采取三角高程法传递到反射片,然后通过倒尺法水准测量来测出目标点的高程[1]。根据全站仪传递反射片的高程,参照水准倒尺观测目标点高程,反复观测多个回合取平均值,最终精确求出目标点高程。
1.3 对向高程测量法
对向高程测量法原理是对两点之间的相对高程进行观测测量,得到两点之间高差,再用已知点求得未知点高程。
2 差分三角高程测量法
2.1 测量原理
差分三角高程采用不量取仪器高,不输入已知点高程,随地架设全站仪,按照水准测量等级,多次调整仪器高对两点进行多个测回的观测,由距离和垂直角算出点与点之间的高差,从而精确推算未知点高程[2]。
2.2 测量方法
差分三角高程测量法原理如图1所示。
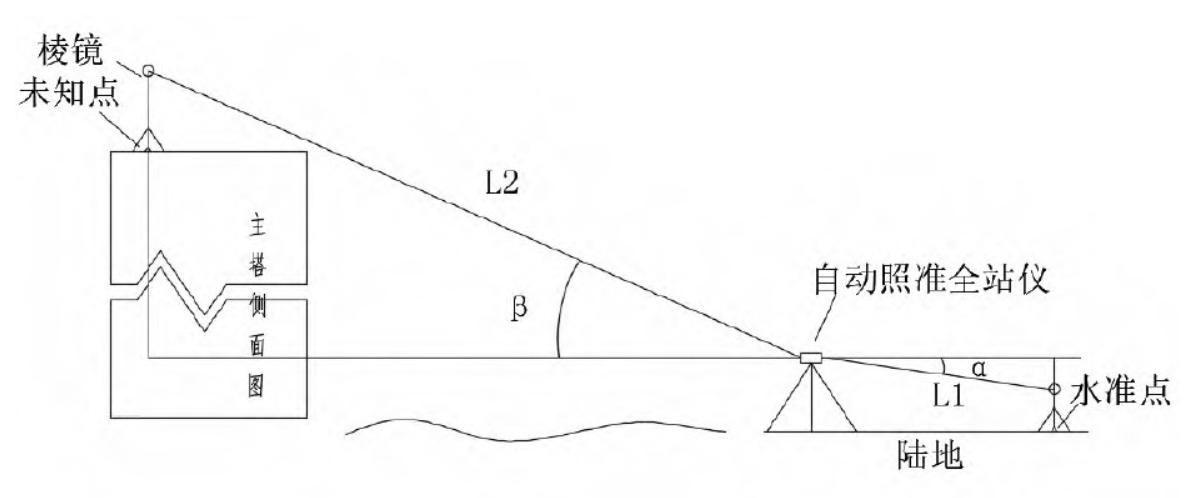
图1 差分三角高程测量法 *载下**原图
在陆地上架设仪器,主塔顶和陆地水准点上分别摆设棱镜并准确地量取棱镜高,做好记录。由于高索塔离岸边较远,人眼难以准确寻找目标,故采用高精度自动照准全站仪观测,观测步骤如下:
(1)调整全站仪正镜瞄准水准点棱镜开始测量,记录斜距和垂直角,并自动旋转望远镜瞄准未知点棱镜,观测、记录。然后倒镜瞄准未知点棱镜,观测、记录;并自动旋转望远镜瞄准水准点棱镜,观测、记录。此时完成第一个测回。
(2)第2个测回调整仪器高,与第1个测回方法相同,如此循环。按照水准测量规范和要求,通过调整仪器高进行多个测回。各个测回中,准确地量取棱镜高度,或者使用强制对中观测墩。
(3)避开不宜观测时间,按照观测步骤(1)和(2),进行下一个时段观测。
在每个测量时段实施之前,通过温度计和气压计量测环境温度和气压,之后输入全站仪中以便对观测数据进行气象改正。
为消除大气折光和地球曲率的影响,全站仪的摆放位置与两测点之间距离大致相等,选择适当的时间观测,避开不宜观测的时间。
3 水准测量技术要求
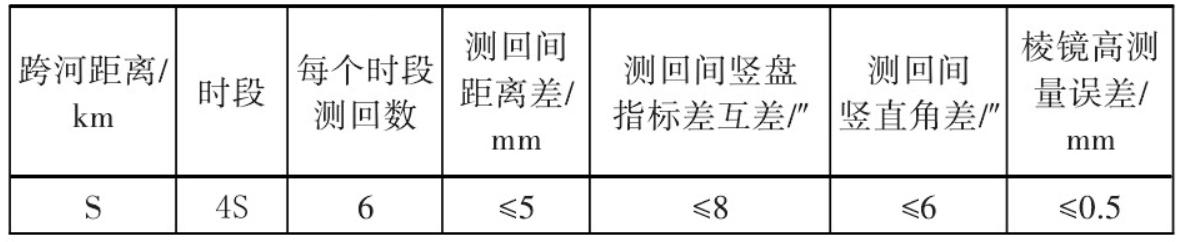
跨河间接高差斜距和天顶距外业测量的技术要求见表1。
表1 跨河间接高差斜距和天顶距外业测量的技术要求 *载下**原图
各双测回的互差限差dH限按式(1)计算:

式(1)中:dH限为双测回的互差限差;MΔ为每千米水准测量的偶然中误差限值(mm);N为双测回的测回数;S为跨河视线长度(km)。当只用1台水准仪或2台经纬仪进行跨河水准测量不能组成双测回时,测回数为表2所列数值的2倍。计算单测回互差的dH限时,N按单测回数计。
4 测量数据计算
一个测回(盘左、盘右)记录的竖直角与距离分别有4个数据,取其平均值,可以分别列出未知点与水准点相对高程公式为:h未1=h仪+L2×sinβ-i棱,h水1=h仪-L1×sinα-i棱,测回高差为Δh1,其他测回高差分别为Δh2,Δh3,Δh4,Δh5,Δh6……Δhn,故各测回平均差值为(Δh2+Δh3+Δh4+Δh5+Δh6+……+Δhn)/n,根据水准点高程可以推算出未知点高程。由于坭洲水道桥某高索塔距离岸边约500m,所以采用6个测回,6个时段,要求记录相关数据距离、垂直角等。
5 三角高程误差传播
以上算式中并没有考虑其他因素,然而现实中地球曲率和大气折光会影响测量的误差[3]。如图2所示。
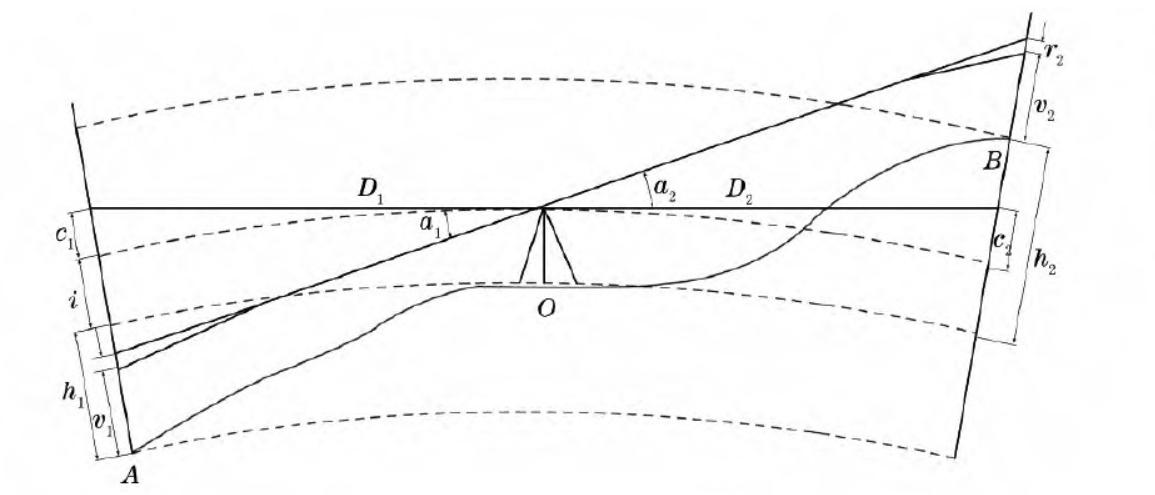
图2 三角高程误差传播 *载下**原图
图2中V1、V2分别为棱镜高,O点全站仪立于A、B两点最中间,即D1基本等于D2,c1、r1分别为O至A的地球曲率和大气折光系数改正数,i是全站仪高度,c2、r2分别为O至B的地球曲率和大气折光系数改正数,h1是A点与O点高差,h2是B点与O点高差。α1、α2分别为在O处观测A点和B点棱镜时的竖直角。
由图可列出OA和OB高差公式分别为h1和h2:

式(2)~(3)中:
分别为c1、r1和c2、r2表达式。R为地球半径。
此时,A、B两点高差为h:
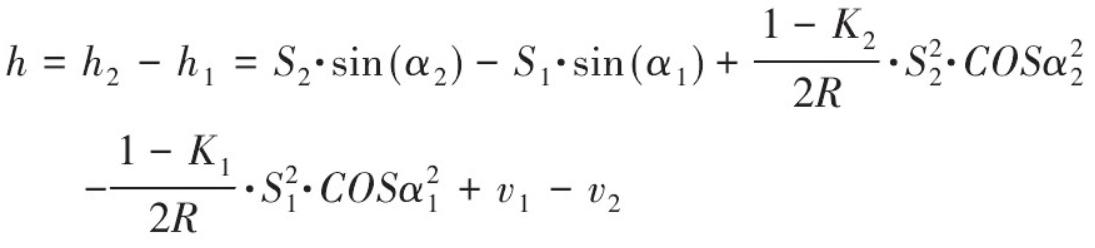
根据误差传播定律,对A、B两点高差公式进行微积分,并转换为中误差关系式,考虑当S1、S2<1000m时(在我国K值取0.08~0.14),式中


sinα2的值约为10-3~10-2,可以忽略不计。设D1=S1·cosα1,D2=S2·cosα2,则上述中误差关系式可写为:
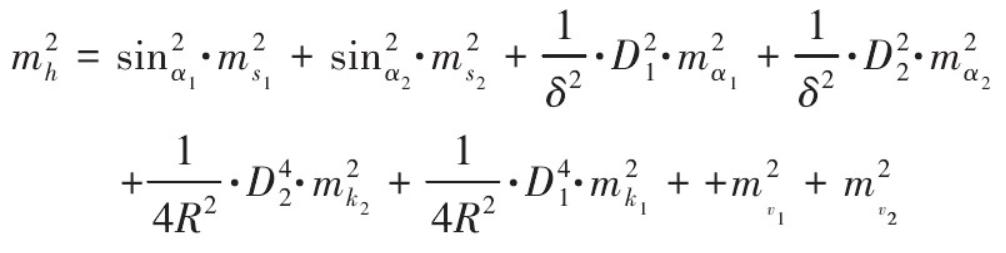
在同一地点进行测量,短时间内K值的变化很小。又因全站仪测量几乎是在相同观测条件下进行的,故可以近似的假定K1约等于K2,并设mk1≈mk2=mk。考虑全站仪特点,设边长的测量精度ms、竖直角的测量精度mα及棱镜的量取精度mv,则上式可以写成:
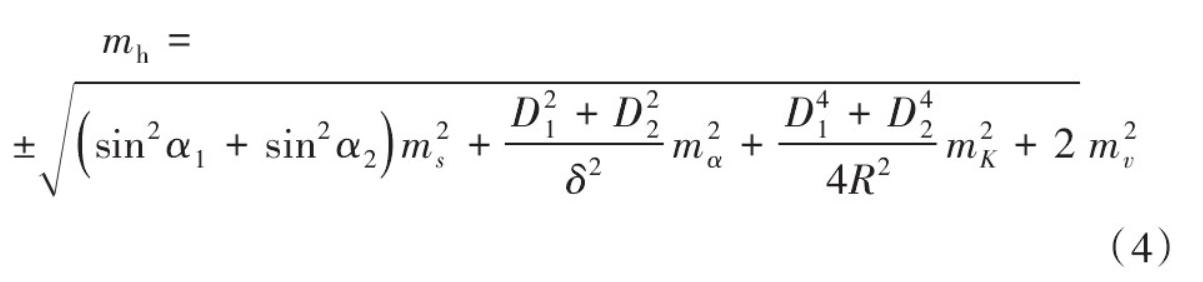
式(4)中:mh为全站仪差分三角高程测量的中误差,ms、mα分别为全站仪斜距、竖直角测量中误差,mK为大气折光系数测定的中误差,mv为棱镜高量取中误差。由式(4)可知,全站仪差分三角高程测量误差与仪器精度(ms,mα)、大气折光系数误差mK及棱镜高量取误差mv等有关。
实际项目中,采用高精度0.5〞的徕卡TM50自动化全站仪,此时仪器精度(ms,mα)得到很大保障,在同一地点,相同观测条件下,前后测距大致相等,多个时段(避开不利观测时段)、多个测回很大程度上提高了全站仪差分三角高程测量精度。
6 结论
(1)悬挂钢尺法测量中,由于三水三桥特大桥主塔比较高,又处在航道中间,悬挂的钢尺摆动幅度随着风速增大而增大,从而很大程度上影响测量的精度。
(2)天顶距测量法中,由于测量仪器自身因素限制,结合现场,很难进行测量,未能采用该测量方法。
(3)对向高程测量方法中,由于桥的主塔过高,在上面架设全站仪受风力影响较大,测量精度得不到保证,因此不能采用这种测量方法。
(4)差分三角高程法很好地解决了以上问题,精度得到保证,同时测量简捷、方便、快速。
参考文献
[1] 周青青,邱立本.全站仪不同方法施测三角高程测量的精度分析[J].科技信息,2011(23):467-468.
[2] 蒋辉,赵仲荣,章书寿.苏通大桥跨江EDM三角高程测量精度的研究[J].现代测绘,2004(6):9-11.
[3] 吴叶美,郭宗河,郑进凤.利用全站仪进行高大建筑物高程基准传递[J].现代测绘,2004(6):32-39.

声明: 我们尊重原创,也注重分享。有部分内容来自互联网,版权归原作者所有,仅供学习参考之用,禁止用于商业用途,如无意中侵犯了哪个媒体、公司、企业或个人等的知识产权,请联系删除,另本头条号推送内容仅代表作者观点,与头条号运营方无关,内容真伪请读者自行鉴别,本头条号不承担任何责任。