米兔积木机器人入手已有半个多月,除了造型搭建上有了一些感悟外,作为程序员出身的我,对这款产品的编程功能也仔细研究一番。

正好这段时间北京降温,每天早上都不大愿意离开被窝给猫主子喂饭,想着能不能用米兔的编程模式搞一个自动送猫粮到猫笼子边上的工具。嘿,还真就实现的有点模样了。
我将在这里使用米兔的积木机器人,带上猫主子的精致猫粮,历经波折前往猫主子豪宅送上大餐的经历。
首先,我们需要准备一些“材料”。
如,搭建完成的米兔积木机器人(平衡车和履带机甲任意选择)、颜色传感器×1、塑料颜色板×1、猫窝×1。
这次测试的环境是一个南北向的普通民宅,客厅距离猫窝有10米左右,其中房间内的茶几、木门等都成为了障碍物,这也考验了编程的逻辑和产品的优越性。
接下来就是具体的实现逻辑,假设米兔机器人开机放置在卧室门口,执行前进命令,中途如果遇到红色木门就后退(6米)回到卧室,如果遇到蓝色塑料板就向右旋转90度,前进一秒,到达目的地,停止。代码逻辑,如下:

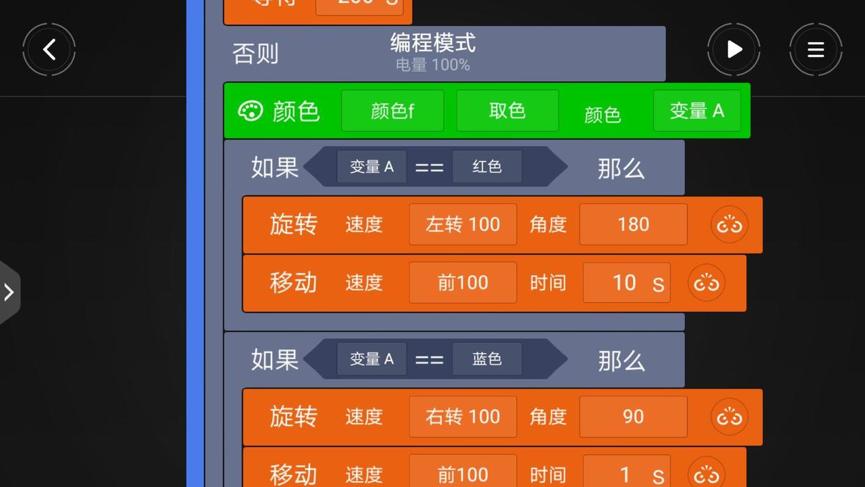


通过米兔积木机器人APP端的模块化编程,很轻松的就能够搭建出来,上面的这段编程逻辑,本人通过亲身检测,可以让机器人端着饭碗给猫主子送去。

其实,您还可以借由我的这个编程事例做更过的事情。当然,如果您是没有接触过编程的人,也没有关系。这款产品的编程非常简单,不需要任何代码录入,需要让机器人做什么,只需要把相应的模块拖拽到其中就可以了。但是,需要您静下心来,在逻辑合理的情况下,它才可以按照您预先设计的执行。
下面,我为您整理了一下米兔积木机器人编程中用到的模块,如果你没有接触过编程的话,非常适合您使用。

编程模式简介
A:将原本专业、复杂的命令代码图形化、模块化,配合有趣的闯关
游戏式教程,简单易学,充满探索的无穷乐趣——米兔积木机器人
B:以结构化的图形来设置程序运行方式——Oomcc
米兔积木机器人的编程模式共有六大模块:
动作控制 - 定义好的各种运动模式
输入模块 - 参与程序计算的数值来源
条件判断 - 真假区分不同状态下处理方式不同
循环控制 - 一定条件下重复执行某一组动作
运算命令 - 对数值进行改变的
自定义 - 一些用户定义好的变量参数
下面就这几个分类做一些个人描述:
动作控制——内部定好的一组动作,需要用户设定各项运动参数。
|
A |
B |
C |
|
音乐 |
这个动作有4大类:/钢琴/机器人/恐龙/常规/ 然后每一类下面都有好多小项可选择 |
简单使用:可以在机器人状态下等待的时候使用机器人-激光音效,在移动时同时使用机器人-加速音效 |
|
等待 |
保持不动的状态:有时长参数 |
|
|
转向 |
让机器人转弯:有速度,时间,角度三个参数,都可自定义输入值 |
|
|
旋转 |
让机器人原地旋转:有速度,旋转角度两个参数 |
|
|
移动 |
让机器人向前移动:有速度,移动时间两个参数 |
输入模块——从自定义模块或者各类传感器上获取到数值
|
A |
B |
C |
|
颜色传感器 |
||
|
声音传感器 |
||
|
亮度传感器 |
||
|
平衡仪传感器 |
||
|
计时器 |
||
|
自定义参数 |
可以从主机获取,也可以发送到主机 |
条件判断——用来区分不同情况,采取不同动作,主要是数值的大于等于小于,以及常量真/假
结构1:如果条件为真(假)执行A模块
结构2:如果条件为真(假)执行A模块,否则执行B模块
条件有以下几类:
常量真/假判断
颜色条件判断
数值大小判断
循环控制——在一定条件下(或无限次)重复执行 一组动作
|
A |
B |
C |
|
循环时间 |
有时间参数:用循环时长参数来限制循环,到时间循环结束 |
|
|
循环次数 |
有次数参数:用循环次数参数来限制循环,到次数循环结束 |
|
|
无线循环 |
没有限制条件:只能通过开始/结束按钮来限制 |
传感器示例
下面我们开始使用传感器来描述一个简单的编程模式示例

颜色传感器示例
开始按钮:执行下面这段指令的启动按钮
因为我们使用的是机器人模型,所以使用双轮平衡
无限循环:无限次循环执行蓝色方框中的部分指令
循环运行状态中,可以通过右上角的暂停按钮中断

颜色传感器:绿色部分,需要指定连接上的颜色传感器
获取已连接的颜色传感器所探测到的色彩值,并且将这个值赋赋予变量A,即用变量A代表获取到的颜色值
条件判断:灰色部分,用来验证获取到的颜色值是否符合条件
如果获取到的颜色值 变量A大于10,将执行灰色框框中的指令,反之,则跳过框框中的指令,再执行后边的指令(因为条件判断外没有指令可以执行,这里是回到循环开始重新执行)
*放播**音效指令:橙色部分的指令
*放播**了一个常规的机关枪音效
到这里我们的示例描述完了,您可以发挥想象开始搭建您的智能积木机器人来实现更多复杂逻辑的功能啦!