具有高柔韧性、出色顺应性、卓越功率密度和安全交互的软致动器在执行复杂任务方面取得了独特的进步,例如内部外科手术、农业收获、柔性机械手和可穿戴设备,这是传统联动刚性机器人无法实现的。最近,由气动压力刺激的软致动器因其相对简单和快速的驱动而引起了人们对开发软致动器和机器人的广泛兴趣。然而,由于现有技术体积功率不足、控制复杂、操作压力大、生产缓慢、成本高,因此很难将现有技术转化为商业应用。
为了克服这些问题,来自江南大学和香港大学的学者设计了一种基于简单制造和低成本策略的分层纺织架构的履带式执行器。与现有的基于纺织品的气动执行器不同,设计的执行器是通过将花式纱线与新颖的三层针织结构相结合而构建的。制备好的致动器同时具有快速响应 (1100° s−1)、大弯曲致动应变 (1080° m−1)、高功率密度 (272 W m−3)、机械坚固性、易于编程的运动和人体触觉舒适性,优于目前报道的基于纺织品的气动致动器。此外,由于工程分层结构的几何过渡,所开发的促动器表现出优异的双刚度效应和应力演变,本研究为解决软流体致动器中柔韧性和力输出的冲突提供了一种简便的方法。这一概念作为一种范式,为使用工程纺织结构开发具有出色设计灵活性、适应性和多功能性的软致动器提供了新的见解,这在医疗康复、物理治疗和软机器人的实际应用中具有巨大的潜力。相关文章以“Bioinspired and Hierarchically Textile-Structured Soft Actuators for Healthcare Wearables”标题发表在Advanced Functional Materials。
论文链接:
https://doi.org/10.1002/adfm.202210351
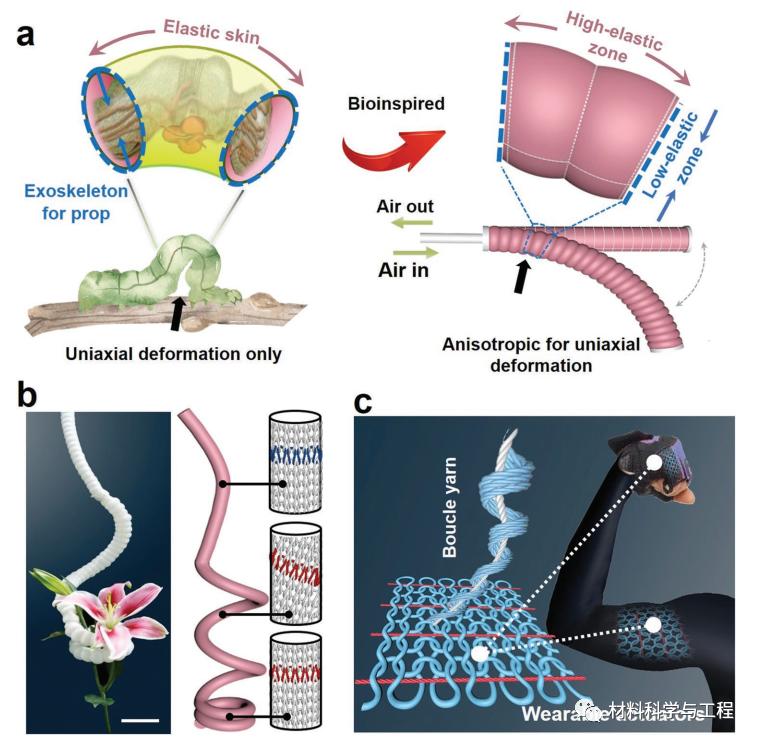
图1.类履带式执行器的生物启发设计和功能多样性。a) 执行器的各向异性单轴变形,用于受履带启发的弯曲致动。b) 通过改变纱线模量和针织方向,将类似履带的执行器应用于具有不同变形的软抓手。c) 应用于辅助可穿戴设备以加强人体肌肉运动。
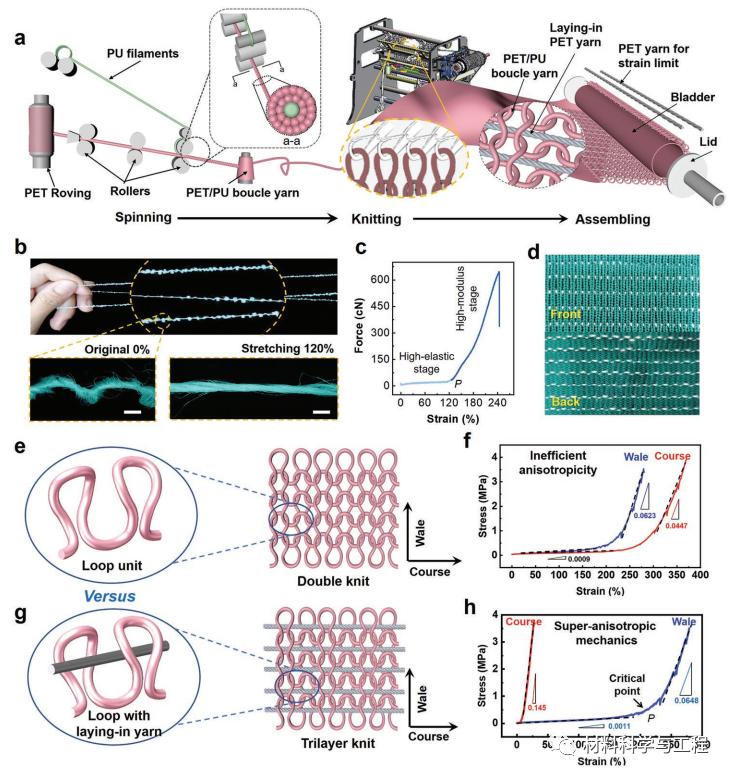
图2.分层纺织架构的制造和表征。a) 履带式致动器的分层制造过程示意图。b) 花式纱线的照片图像和原始状态和拉伸状态为 120% 伸长率的纱线光学显微图像。c) 粗纱的机械性能:相对于临界点 P ≈ 120% 应变的双刚度拉伸性能。d) 三层编织结构正面和背面的照片图像。e-h) 传统双针织和三层针织的比较。e) 和 g) 通过环路单元和拓扑编织架构揭示其出色性能的来源。f)和h)显示了双机和三层针织在各向异性和双刚度性能方面的典型机械性能。
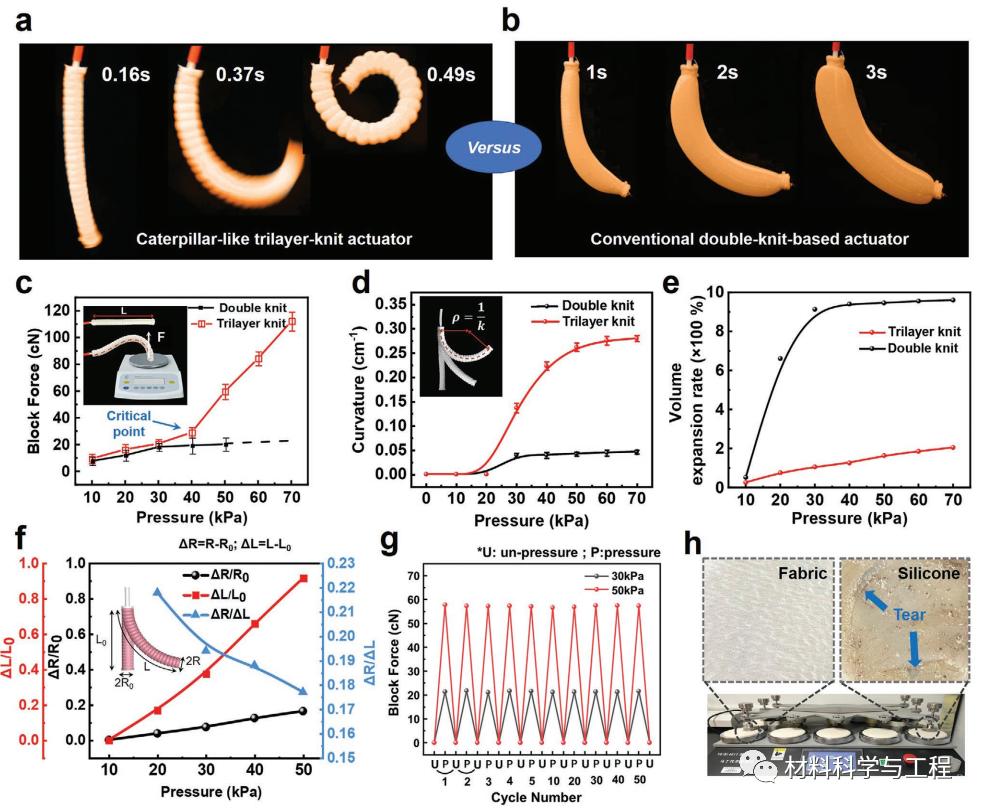
图3.履带式执行器的致动性能。a) 照片图像显示了在 50 kPa 的供应压力下,毛毛虫状三层编织执行器在 0.49 秒内的快速和大弯曲驱动应变。b) 照片图像显示了传统双编织执行器在 50 kPa 供应压力下 3 秒内的弯曲驱动。c) 不同施加压力下的阻断力。d) 由双层编织和三层编织制成的执行器的弯曲曲率。e) 不同施加压力下的体积膨胀率。f) 充气时改变履带状弯曲致动器的几何尺寸比。 g) 在不同压力(30 和 50 kPa)下,履带式致动器在 50 个循环中阻断力的可逆循环变化。
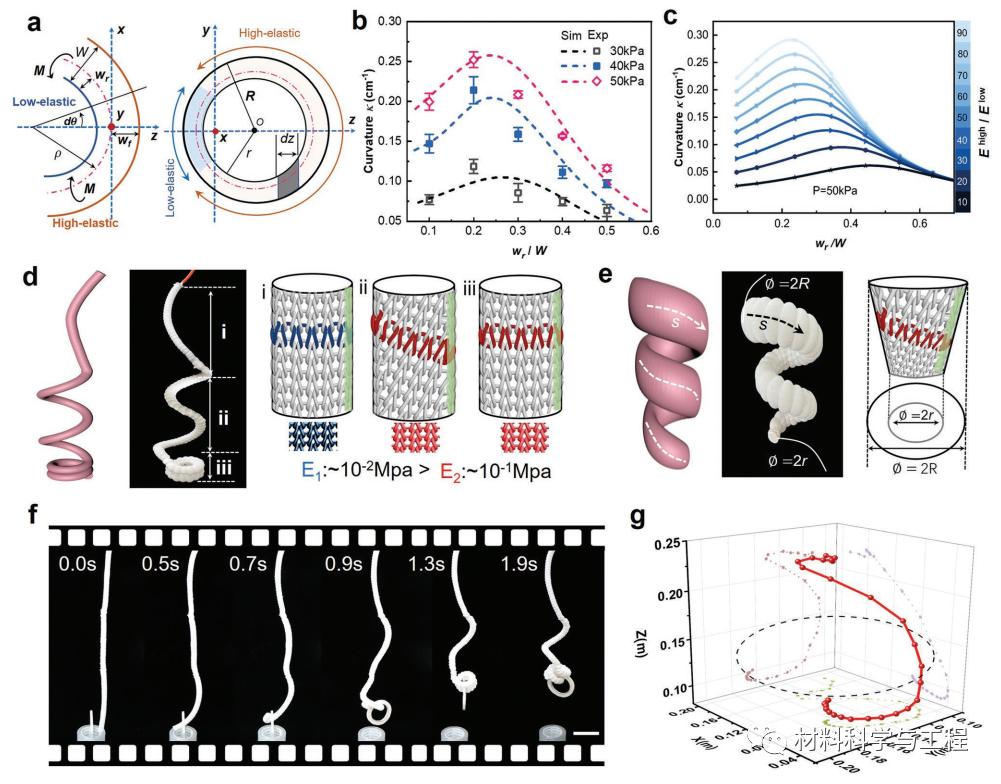
图4.具有多模式致动器的编程执行器。a) 基于弯曲执行器纵向截面和横截面参数分析的双模量问题示意图。b) 不同弹性比下弯曲曲率演变的理论曲线和实验数据。c) 在不同模量比Ehigh/Elow(低弹性区域和高弹性区域之间的模量之比)下,预测弯曲曲率与弹性比wr/W的函数关系。d) 用于多模式驱动的可编程的几何形状和弹性。e) 直径梯度引起的锥形螺旋变形。f) 来自电影 S2 的图像,显示了通过顺序滚动和螺旋提升胶带的抓取过程。g) 执行器的平行多模式运动,在空间坐标中具有单位矢量轨迹。
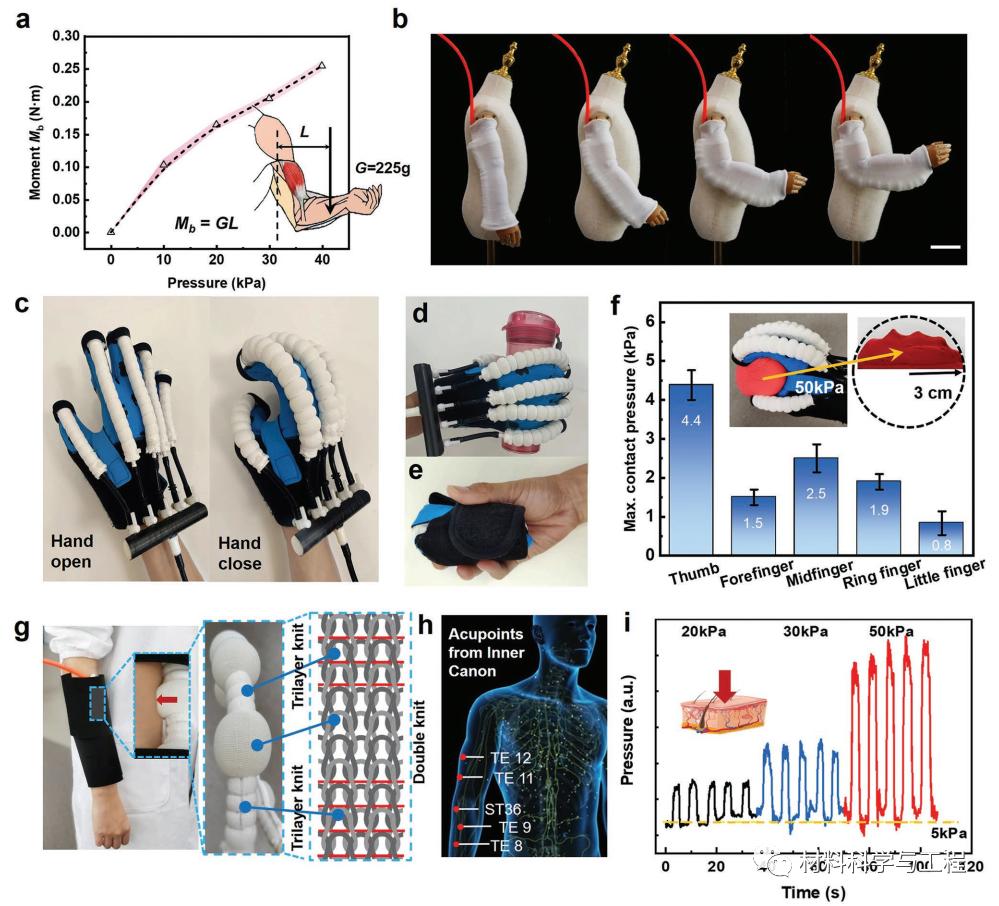
图5.三层编织执行器在医疗保健辅助可穿戴设备中的应用。a) 执行器在 225 g 假臂上的力矩Mb 作为供应压力的函数。b) 显示可穿戴助行器执行器概念用法的序列图像。c) 由三层编织执行器驱动的气动手套,用于辅助手指运动。d) 借助气动手套抓住水瓶。e) 纺织式气动手套的可折叠性。f) 在50 kPa 的供应压力下抓取直径为 6 cm 的气缸时,每个手指的最大接触压力。g,h)按摩机器人由葫芦状纺织执行器通过三层编织和双编织结构的组合设计实现,用于对人体手臂上的穴位施加压力。i) 在不同供应的压力下,按摩机器人在穴位上易于调节的压力输出。
受毛毛虫运动行为和解剖结构的启发,本研究设计和演示了可定制和可重新组装的基于纺织品的软执行器。其具有卓越的驱动性能、机械坚固性、易于编程的运动和人体触觉舒适性。理论建模和*真证仿**明了三层针织架构的分层纺织品设计和各向异性力学的重要作用,这使我们能够快速编程、制造和实现各种致动器,从而将致动器与多种运动方式耦合,以产生自适应软机器人,如夹持器。展示了用于便携式医疗保健可穿戴设备的高性能三层编织执行器的巨大价值,具有更安全、更舒适和实用的功能。这里介绍的概念也可以适用于其他需要可变刚度和各向异性机械行为的多功能可穿戴设备。(文:SSC)
本文来自微信公众号“材料科学与工程”。欢迎转载请联系,未经许可谢绝转载至其他网站。