本文节选自2021年12月14日发表在《自然-通讯》(Nature Communications) 上的灵活的机器手(Integrated linkage-driven dexterous anthropomorphic robotic hand)。
该论文介绍了一种机器手,集成了响应式运动、传感并拥有高度灵活性所需的所有组件。这种机器手可以安装到现有商业机械手臂上,能执行各种各样的任务——从抓握鸡蛋到使用剪刀和镊子。
论文节选内容如下:
Integrated linkage-driven dexterous anthropomorphic robotic hand
集成连杆驱动的灵巧拟人机械手
Robotic hands perform several amazing functions similar to the human hands, thereby offering high flexibility in terms of the tasks performed.
机器人手执行几个类似于人手的惊人功能,从而在执行任务方面提供高度灵活性。
However, developing integrated hands without additional actuation parts while maintaining important functions such as human-level dexterity and grasping force is challenging.
然而,在保持重要功能(如人类水平的灵巧性和抓握力)的同时,开发没有额外驱动部件的集成手是具有挑战性的。
The actuation parts make it difficult to integrate these hands into existing robotic arms, thus limiting their applicability.
驱动部分使得这些手很难集成到现有的机械臂中,从而限制了它们的适用性。
Based on a linkage-driven mechanism, an integrated linkage-driven dexterous anthropomorphic robotic hand called ILDA hand, which integrates all the components required for actuation and sensing and possesses high dexterity, is developed.
基于连杆驱动机构,开发了一种集成连杆驱动的灵巧拟人机器人手——ILDA手,它集成了驱动和传感所需的所有部件,具有很高的灵活性。
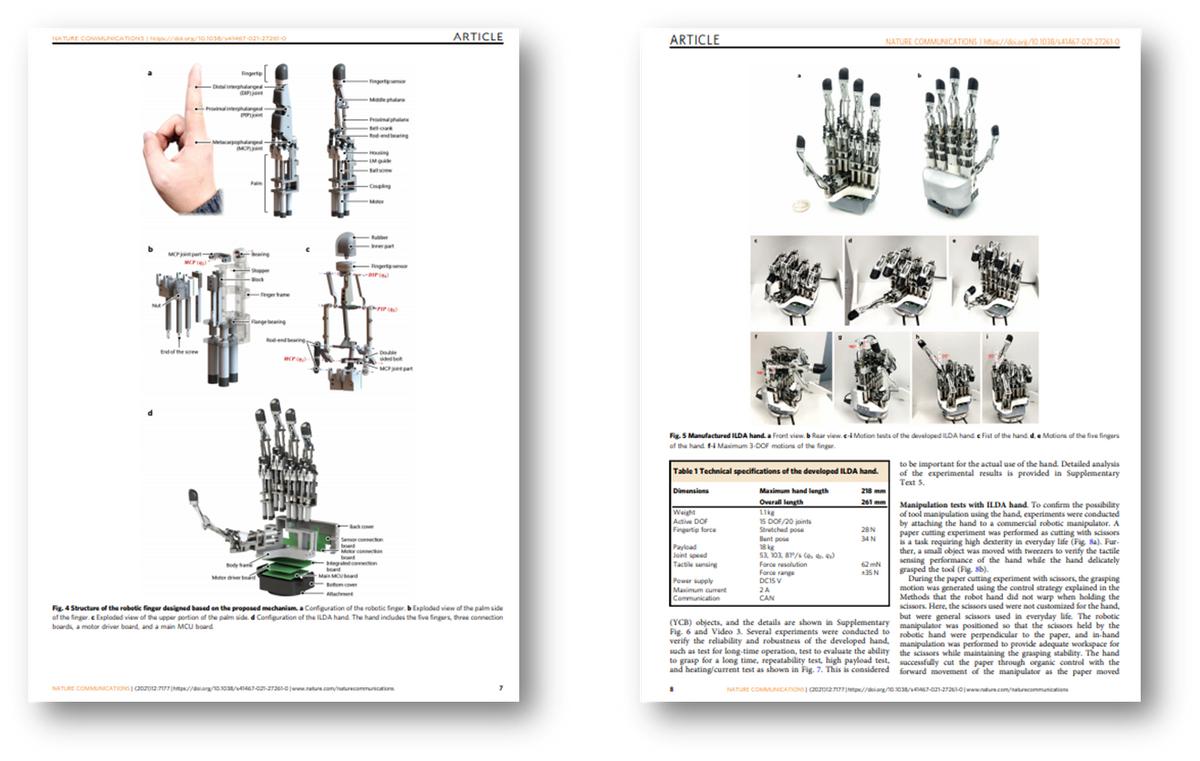
It has the following features: 15-degree-of-freedom (20 joints), a fingertip force of 34N, compact size (maximum length: 218 mm) without additional parts, low weight of 1.1 kg, and tactile sensing capabilities.
它具有以下特点:15个自由度(20个关节),34N的指尖力,紧凑的尺寸(最大长度:218 mm),无需额外零件,1.1 kg的低重量,以及触觉传感能力。
Actual manipulation tasks involving tools used in everyday life are performed with the hand mounted on a commercial robot arm.
日常生活中使用的工具的实际操作任务是用安装在商用机器人手臂上的手来完成的。
重点词汇
linkage连接;联合;互相连接;连接系统;关联原则;基因连锁
dexterous敏捷的;灵巧的
anthropomorphic拟人化的;具有人类特点的
robotic机器人的;自动机的;机械呆板的;机器人(或自动机)似的
actuation刺激;冲动;驱使
dexterity灵巧;熟练
grasping贪心的;贪婪的
applicability适用性;适应性
integrates(使)结合;成为一体;使合并;使整合;(integrate的第三人称单数)
possesses拥有;缠住;迷住;掌握;控制;(possess的第三人称单数)
similar to 类似
in terms of 依据 ; 在…方面;从…角度看;根据…来说
such as 例如 ; 像 ; 象…这样 ; 诸如…之类
make it 到达 ; 及时赶上参加 ; 成功
Based on 以……为基础;在……基础上,以……为依据
low weight 体重减轻
Interpreting the extremely complex functioning of the human hand remains an unresolved challenge in the field of robotics.
在机器人领域,解释人手极其复杂的功能仍然是一个尚未解决的挑战。
In particular, the movement of the human hand involves considerably high dexterity levels, suitable for performing a wide variety of tasks requiring a strong gripping force ranging from fine object grasping to tool manipulation.
特别地,人手的运动涉及相当高的灵巧度水平,适合于执行从精细物体抓取到工具操作的各种需要强抓持力的任务。
Out of the 206 bones in the human body, 54 bones are in the hands, corresponding to a quarter of the total number of bones; the muscle structure driving them is also extremely complex.
在人体的206块骨头中,有54块骨头在手上,相当于骨头总数的四分之一;驱动它们的肌肉结构也极其复杂。
In addition, the tactile corpuscles, which enable tactile sensation, are mostly distributed in the hand, and they help in performing delicate tasks.
此外,能够产生触觉的触觉小体主要分布在手部,它们有助于完成精细的任务。
In particular, because most tactile corpuscles are distributed at ~1 mm intervals in the fingertips, delicate tasks are easily performed with the fingertips.
特别是,由于大多数触觉小体以约1毫米的间隔分布在指尖,因此用指尖很容易完成精细的任务。
重点词汇
unresolved未解决的;未解答的;意见未统一的;尚未打定主意的;不果断的
robotics机器人学;机器人技术
wide variety品种繁多;各种各样
gripping紧握;紧抓;(grip的现在分词形式);理解;手柄;了解;扣人心弦的
a quarter of一季度;一刻钟;四分之一
tactile触觉的;与触觉相关的;真实的;可触知的;能触到的;碰触的
corpuscles小体;血球;(corpuscle的复数)
sensation感觉;知觉;轰动;觉察;感觉能力;引起轰动的人
in the field of 在…方面,在…领域
In particular 尤其 ; 特别
ranging from 从…排列
In the present study, an integrated linkage-driven dexterous anthropomorphic robotic (ILDA) hand was developed.
本研究开发了一种集成连杆驱动的灵巧拟人机器人(ILDA)手。
To include the abovementioned features, a finger mechanism was developed for the robotic hand.
为了实现上述功能,开发了一种用于机械手的手指机构。
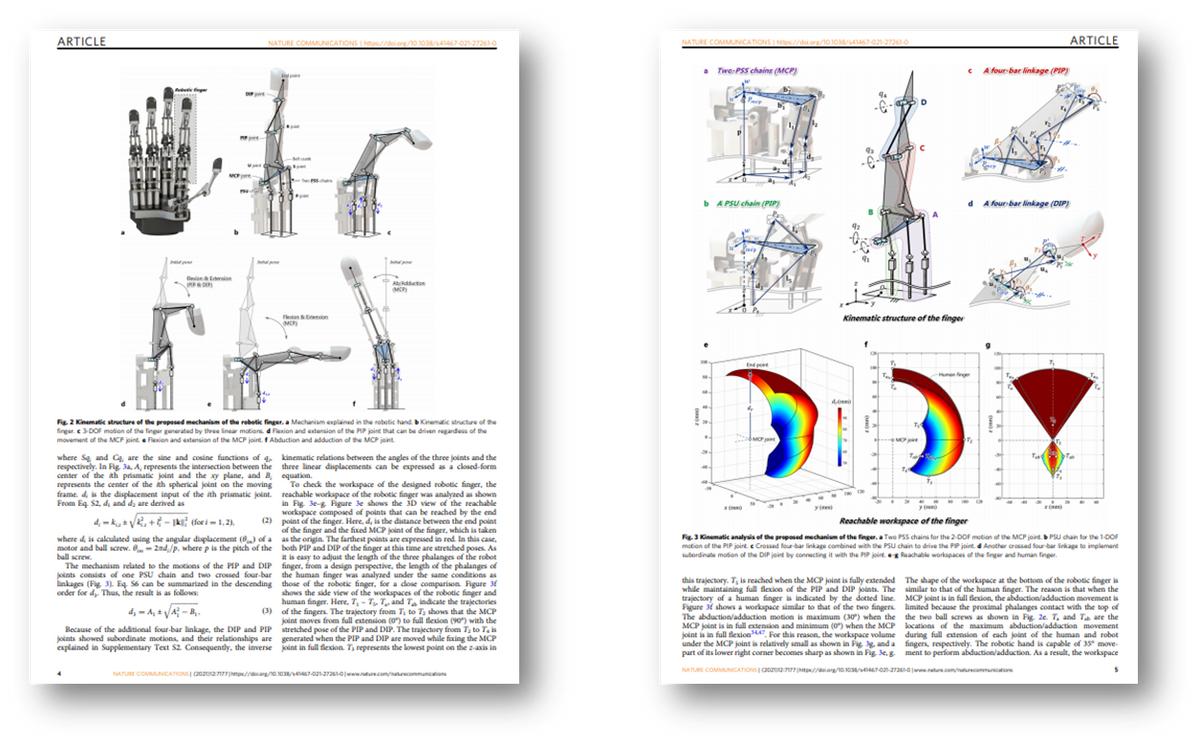
The mechanism was constructed through the fusion of parallel and series mechanisms to implement 2-DOF movements in a metacarpophalangeal (MCP) joint and 1-DOF movements in a proximal interphalangeal (PIP) joint through link combinations.
该机构是通过并联和串联机构的融合来构建的,以通过连杆组合来实现掌指关节的2自由度运动和近端指间关节的1自由度运动。
The design was developed considering the selection of small parts that can play the role of each joint, part placement and configuration to achieve the desired DOF motion and drive angles, and an efficient power transmission structure to obtain a high fingertip force and its back drivability.
该设计的开发考虑了能够发挥每个关节作用的小零件的选择、零件的放置和配置以实现期望的自由度运动和驱动角度,以及有效的动力传输结构以获得高指尖力及其背部驱动能力。
In addition, the force-sensing capability of the hand is secured by attaching a six-axis force/torque (F/T) sensor to the fingertip.
此外,通过在指尖安装一个六轴力/扭矩(F/T)传感器,可以保证手的力感知能力。
With the designed finger, a robotic hand having 15 DOF and 20 joints with five fingers were developed.
在设计手指的基础上,研制了15个自由度、20个关节、5个手指的机械手。
For practical use, it was constructed by resolving the board layout and wiring problems to ensure the compactness of the electronics.
在实际使用中,它通过解决电路板布局和布线问题来确保电子器件的紧凑性。
All motors were integrated in the palm of the hand having five fingers with fingertip sensors (Fig. 1a, b).
所有电机都集成在具有五个手指的手掌中,带有指尖传感器(图1a,b)。
Therefore, it could be easily attached to a general robot arm with a simple connection configuration, as shown in Fig. 1c.
因此,它可以简单地连接到一般的机器人手臂上,如图1c所示。
To evaluate the performance of the developed hand, its performance was analyzed through several experiments.
为了评价研制出的手的性能,通过多次实验对其性能进行了分析。
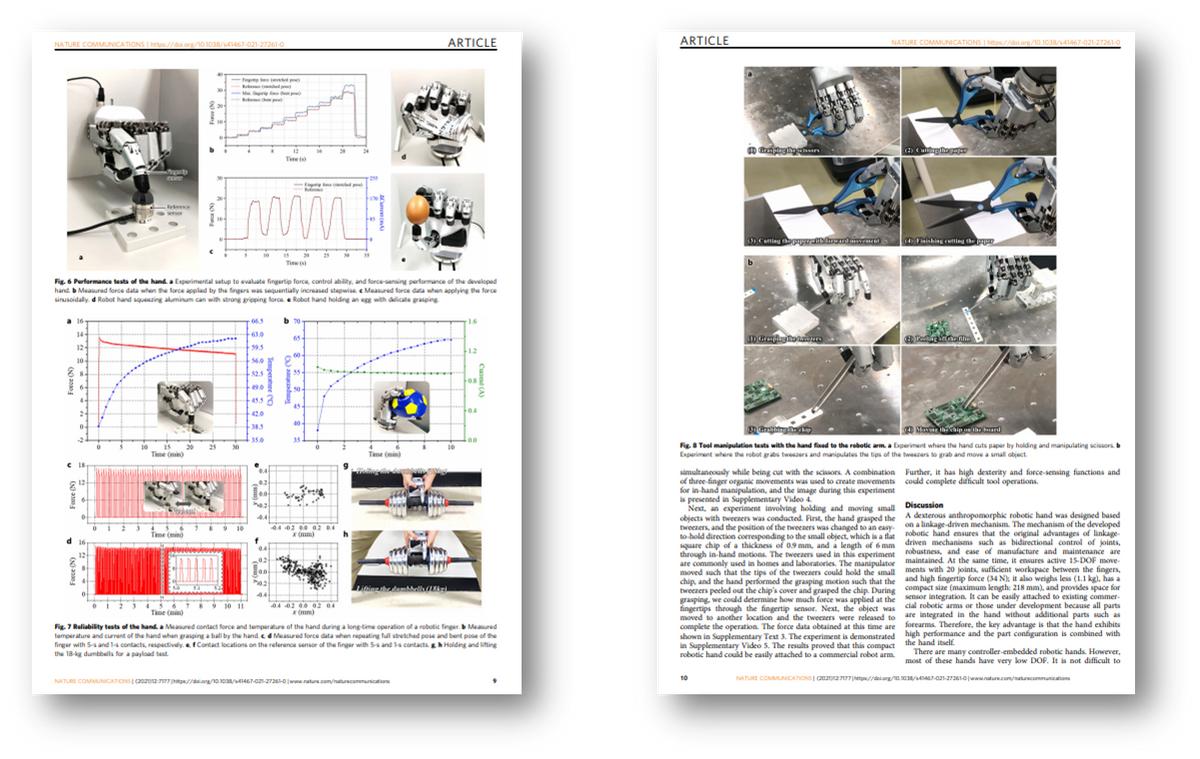
Experiments were conducted to determine the possibility of grasping objects with various shapes, provide strong grasping forces to crush cans, and ensure delicateness when holding eggs.
进行实验以确定抓取各种形状的物体的可能性,提供强大的抓取力来压碎罐头,并确保在拿鸡蛋时的精细度。
Finally, the high utilization possibility of the hand was verified through tests involving cutting paper with scissors and picking up small objects with tweezers, thus replicating tool operations performed in everyday life (Fig. 1d).
最后,通过用剪刀剪纸和用镊子夹起小物件的试验,验证了手的高利用率,从而复制了日常生活中使用工具的操作(图1d)。
重点词汇
abovementioned上述的
proximal近端的;近身体中心的;近源的;基点的
interphalangeal指节间的
combinations结合;结合体;联合体;联合;(combination的复数)
play the role发挥作用;扮演角色;起到的作用
power transmission电力传输;送电;输电
fingertip指尖;用手指的;用手指操作的
power transmission 电力传输
In addition 此外 ; 另外;加之;除…之外
A dexterous anthropomorphic robotic hand was designed based on a linkage-driven mechanism.
基于连杆驱动机构设计了一种灵巧拟人机械手。
The mechanism of the developed robotic hand ensures that the original advantages of linkage-driven mechanisms such as bidirectional control of joints, robustness, and ease of manufacture and maintenance are maintained.
所开发的机械手的机构确保了保持连杆驱动机构的原始优势,例如关节的双向控制、坚固性以及制造和维护的便利性。
At the same time, it ensures active 15-DOF movements with 20 joints, sufficient workspace between the fingers, and high fingertip force (34 N); it also weighs less (1.1 kg), has a compact size (maximum length: 218 mm), and provides space for sensor integration.
同时,它确保了20个关节的主动15自由度运动,手指之间有足够的工作空间,以及高指尖力(34n);它还重量更轻(1.1千克),尺寸紧凑(最大长度:218毫米),并为传感器集成提供空间。
It can be easily attached to existing commercial robotic arms or those under development because all parts are integrated in the hand without additional parts such as forearms.
它可以很容易地安装在现有的商用机械臂或正在开发中的机械臂上,因为所有的部件都集成在手上,而不需要额外的部件,比如前臂。
Therefore, the key advantage is that the hand exhibits high performance and the part configuration is combined with the hand itself.
因此,关键的优点是该手具有高性能,且部件配置与手本身相结合。
重点词汇
bidirectional有双向功能的
workspace工作空间;工作地方;商业租用地;商业销售地;暂时存储器;暂存器;工作存储器
weighs有…重;考虑;重达
maximum length最大长度;最长长度
under development发展中;正在开发;开发之中
The grasping ability of the ILDA was confirmed when it squeezed the aluminum can and delicately grasped the egg. In addition, the hand could perform different types of grasping according to the shapes of various objects.
ILDA的抓握能力在挤压铝罐和小心抓握鸡蛋时得到了证实。此外,手可以根据不同物体的形状进行不同类型的抓握。
Scissors and tweezers are used to determine the possibility of manipulating tools used in everyday life.
剪刀和镊子被用来确定操纵日常生活中使用的工具的可能性。
Although it was difficult to accurately quantify the effectiveness of the hand in manipulating tools using scissors, we performed a combination of movements using many DOF of the hand and through bidirectional control of the joints.
虽然很难准确量化手在使用剪刀操作工具时的有效性,但我们使用手的多个自由度并通过关节的双向控制来执行组合运动。
As shown in the video, the manipulation movements performed using scissors were very similar to that of humans.
正如视频中所显示的,使用剪刀进行操作的动作与人类非常相似。
It is easier to manipulate tweezers compared to scissors as the hand movement is slightly simpler.
与剪刀相比,使用镊子更容易,因为手的动作稍微简单一些。
However, it is not easy to hold the tweezers, turn them in the desired direction, and maintain the grip while holding the object.
然而,握住镊子,向所需方向转动镊子,并在握住物体的同时保持抓持是不容易的。
We were able to determine whether the object was grasped correctly by observing the fluctuation in the measured force while holding a very small object, indicating high potential for easy force control when using the robot hand in future applications.
当我们握住一个非常小的物体时,通过观察测量到的力的波动,我们能够确定物体是否被正确地抓住,这表明在未来的应用中,当使用机器人手时,很容易进行力控制。
重点词汇
squeezed挤压;(squeeze的过去式和过去分词)
delicately精致地;微妙地;优美地
grasped抓住;领会;掌握;毫不犹豫地抓住(机会);(grasp的过去式和过去分词)
scissors剪刀;剪式的;交叉配合;交叉移动
tweezers镊子;小钳子
manipulating操纵;治疗脱臼;正骨;影响;(manipulate的现在分词)
everyday life日常生活;每天生活;每天日常生活
quantify表示…的数量;量化;使量化;用量词限定
The development of a dexterous anthropomorphic hand with a high DOF, which is still an open issue, requires researches from a scientific as well as an engineering perspective.
高自由度拟人灵巧手的开发仍然是一个悬而未决的问题,需要从科学和工程的角度进行研究。
In this study, we tried to maximize the market penetration of robotic hand in various research fields. 在这项研究中,我们试图最大限度地提高机器人手在各个研究领域的市场渗透率。
For this, a robotic hand was developed by combining the scientific issue of developing a mechanism for robotic hand and cutting-edge engineering technology.
为此,将开发机械手机构的科学问题与尖端工程技术相结合,开发出了机械手。
Thus far, many dexterous robotic hands have been developed, but their universal use has been limited by high cost resulting from complex manufacturing processes and difficulties in maintenance. 到目前为止,已经开发出了许多灵巧的机器人手,但由于制造工艺复杂、维护困难等原因,它们的普遍使用受到了限制。
It is expected that its applicability will spread to actual research fields and the industry through considerations of functionality and cost.
通过对功能和成本的考虑,预计其适用性将扩展到实际研究领域和行业。
As a result, we hope to contribute to the development of the various fields of robotics by implementing the developed robotic hand.
因此,我们希望通过实现已开发的机械手,为机器人各个领域的发展做出贡献。
We consider that it is very meaningful to use the robotic hand to perform paper cutting with scissors.
我们认为使用机械手用剪刀进行剪纸是非常有意义的。
Further, we expect that the experiment of transferring chips with tweezers will have significant implications for scientific progress.
此外,我们预计用镊子转移芯片的实验将对科学进步产生重大影响。
In the future, we will pioneer new research fields by performing tasks that have not been done before in cooperation with other researchers.
在未来,我们将与其他研究人员合作,完成以前没有完成的任务,开拓新的研究领域。
In conclusion, the designed ILDA hand that can be easily attached to robotic arms, while simultaneously accommodating various advantageous features, can be used for further research on robotic hands in various fields.
综上所述,所设计的ILDA手既能方便地附着在机械臂上,又能适应各种优势特征,可用于机械手在各个领域的进一步研究。
重点词汇
open issue胜负未定;开发出
market penetration市场渗透;市场渗透力
cutting-edge前沿;尖端;先进的;尖端的;最前沿的
thus far迄今;现在为止;至今
universal use普遍应用;普遍利用
high cost高成本;高费用;造价高
spread to传播到, 蔓延到, 扩散到
基于多年的语言学习实践,发现,随着社会的飞速发展,英语、汉语等重要语言也在不断的与时俱进。这个时候,我们以不变应万变的方法之一,可以是阅读主流刊物。
针对英语而言,无论是为了提高英语水平还是备考任何英语考试,英美外刊都应该是列为首选的最重要的学习资料。当我们真正深入去精读过英美外刊,不仅可以了解英语国家的文化,增长我们的见识,对于英语学习来说,还能够积累以英语为母语者的常用词汇,短语和句型。
建议大家在阅读本文时:第一遍快速阅读,领悟文章重点,了解大意;第二遍开始精读,每看完一段,要仔细体会其中每一句在段落中的功能,各句之间的联系,这一段是如何衔接上下文的,它在整个语篇中的地位,以提高你猜测词义和推理上下文能力;第三遍可以查看中英翻译,继续从微观到宏观地理解原文,学会区分重点和次要信息(这对考试时的阅读非常重要),总结词汇,搭配和句型,并且最好独自翻译一遍原文,以进一步加强理解。
最后建议大家要学以致用,利用从文章中学到的词汇,搭配,句型以及长难句结构进行造句,提高英文写作能力。
学习路径建议:金句记忆——关键词学习——拓展词汇训练——触类旁通——举一反三。
温馨提示:阅读完看着中文译文自己动手翻译出英文,然后将您译的英文与原文进行对比,以此来提升英文表达和句子结构的准确性和地道性。