《测绘学报》
构建与学术的桥梁 拉近与权威的距离
《测绘学报》抖音自开通以来,聚焦于测绘地理信息学术前沿进展,受到了广大专家学者的大力支持,*放播**量数万,粉丝1.7万。
复制链接,关注我们哦!
【测绘学报的个人主页】长按复制此条消息,长按复制打开抖音查看TA的更多作品##7NsBSynuc88##[抖音口令]

【引文格式】胡鹏, 黄观文, 张勤, 等. 顾及边界入射信号的多模水汽层析方法. 测绘学报,2020,49(5):557-568. DOI: 10.11947/j.AGCS.2020.20190113
顾及边界入射信号的多模水汽层析方法
胡鹏,黄观文
 ,张勤,燕兴元,李哲
,张勤,燕兴元,李哲
长安大学地质工程与测绘学院, 陕西 西安 710054
收稿日期:2019-04-11;修回日期:2020-01-05
基金项目:国家重点研发计划(2018YFC1505102);国家自然科学基金(41774025;41731066);陕西省技术创新引导专项(2018XNCGG05);中央高校科研业务费专项(CHD300102269305);二代导航重大专项(GFZX0301040308)
第一作者简介:胡鹏(1994-), 男, 硕士, 研究方向为GNSS数据处理与GNSS气象学。E-mail:974648161@qq.com
通信作者:黄观文,E-mail:huang830928@163.com
摘要:利用GNSS三维水汽层析技术全天候地获取高时空采样率的水汽垂直分布信息,已成为GNSS气象学中一大研究热点。当前,基于单一导航系统的传统层析方法存在观测数据利用率低、观测分布不均等不足。本文设计和实现了一种顾及边界入射信号的多模水汽层析方法,采用香港CORS网观测数据和无线电探空产品进行精度验证,并详细分析边界入射信号和多模层顶信号的引入对层析水汽结果的改善程度。结果表明:相较于传统GPS层析方法,本文采用的融合两类多模层顶信号和边界入射信号的新水汽层析方法,兼备边界入射信号和多模层顶信号的优点,可得到更高精度和更可靠的三维水汽信息。
关键词:三维水汽 层析 GNSS气象学 无线电探空数据 边界入射信号
A multi-GNSS water vapor tomography method considering boundary incident signals
HU Peng,HUANG Guanwen, ZHANG Qin, YAN Xingyuan,LI Zhe
College of Geological Engineering and Geomatics, Chang'an University, Xi'an 710054, China
Foundation support: The National KeyResearchand Development Programof China (No.2018YFC1505102); The National Natural Science Foundation of China (Nos.41774025;41731066);The Special Fund for Technological Innovation Guidance of Shaanxi Province (No.2018XNCGG05);The Special Fundfor Basic Scientific Researchof Central Colleges (No.CHD300102269305);The Grand Projectsofthe BeiDouG2 System (No.GFZX0301040308)
First author: HU Peng (1994-), male, master, majorsin GNSS data processing and GNSS meteorology science.E-mail:974648161@qq.com.
Corresponding author: HUANG Guanwen,E-mail:huang830928@163.com .
Abstract: Three-dimensional water vapor distribution information with high spatial and temporal sampling can be obtained all-weather by using GNSS water vapor tomography technology, which has become a major research hotspot in GNSS meteorology. At present, the traditional tomography method based on single navigation system has some shortcomings, such as low utilization rate of observation data and uneven distribution of observation. This paper designs and implements a multi-GNSS water vapor tomography method which takes into account the boundary incident signal. The accuracy of the method is verified by using the observation data of Hong Kong CORS network and radio sounding products. The improvement of the results of water vapor tomography by introducing boundary incident signal and multi-GNSS signal is analyzed in detail. The results show that compared with the traditional GPS tomography method, the proposed water vapor tomography method, which combines the advantages of boundary incident signal and multi-GNSS signal, can obtain more accurate and reliable three-dimensional water vapor information.
Key words: 3D water vapor tomography GNSS MET radiosonde data boundary incident signals
精确的大气水汽三维分布信息对于提升中尺度数值预报模式的气象预报精度具有非常重要的意义。当前数值预报模式的初始湿度场主要采用无线电探空资料提供的水汽三维剖面信息,但其存在采样时间间隔过长和探空站分布间距过大等问题,难以描述中尺度暴雨系统和满足近实时短临预报需求[ 1];而气象卫星资料虽能满足这种时空密度需求,但其易受云雾的遮挡,且反演精度较低。GPS三维水汽层析技术[ 16]具备时空解算率高、全天候运行的特点,可为校正和改善数值预报模式初始值精度提供一种全新的解决方式。但基于单一导航系统的层析方法还存在很多问题,如观测数据利用率低、观测分布不均和反演精度不高。
伴随着各国导航系统的不断发展与现代化,过去单一的GPS导航卫星系统时代已经逐步过渡为多系统并存且相互兼容的全球导航卫星系统(global navigation satellite system,GNSS)时代[ 2]。很多学者采用多模层顶信号增强单一GPS水汽层析技术,文献[3-5]利用GPS实测数据和仿真系统数据,发现多系统组合方案较单GPS方案拥有分布更均匀的观测信号和更优化的格网空格率,在一定程度上可以改善三维水汽层析结果;文献[6-7]分别利用GPS与BDS、GPS与GLONASS实测数据进行水汽三维湿度场的重构试验,验证了组合系统拥有更好的精度和可靠性;文献[8-9]进行GPS/GLONASS/BDS组合水汽层析,进一步证实了多模观测值能有效提升三维水汽层析精度。然而多模组合并未解决观测值使用率低的问题,反而舍弃了更多的层析边界入射信号,而这些信号中也蕴含着丰富的水汽信息。
为了有效利用层析边界入射信号的水汽信息,文献[10-12]分别利用无线电探空数据和欧洲中期天气预报中心(European Centre for MediumG range Weather Forecasts,ECMWF)资料建立了一种基于水汽密度比例因子的三维水汽层析算法,验证了采用该算法能获得相对较好的层析水汽结果。文献[13]通过缩小层析水平范围构建层顶入射信号上的水汽含量与范围缩小后的层析边界高程间的比例关系,用于恢复边界入射信号的有效水汽信息,实现了观测数据利用率的最大化和提高层析水汽的精度。文献[14-15]附加一个辅助层析区域,使从研究区域侧面入射的信号信息也可被有效利用,同时能改善最终的水汽层析结果。但以上研究仅仅只在单一导航系统中得以实现,在多模组合层析应用中的理论还不够成熟。
现有研究成果从上述两个角度出发,均能证实边界入射信号和多模层顶信号可优化最终的层析结果,但尚未有人分析两类信号改善水汽层析结果的区别及其融合后的增益效果。本文采用了一种顾及边界入射信号的多模水汽层析方法,设计和实现了融合边界入射信号和多模层顶信号的水汽层析试验,并详细对比了引入边界入射信号和多模层顶信号对层析水汽结果的改善程度,同时采用无线电探空数据进行精度验证。
1 GNSS层析原理1.1 观测方程
根据倾斜路径水汽含量(slant water vapor,SWV)的定义,其表达形式为

(1)
式中,S表示SWV;L表示卫星到接收机的信号路径;ρ water表示水汽密度,单位为g/m3。
将式(1)离散化后可得到线性表达式

(2)
式中,Sp表示第p条斜路径信号上的水汽含量,单位为mm;dijk为信号p在网格(i、j、k)内的截距,单位为km;ρijk为(i、j、k)网格内的水汽密度;Ap表示第p条斜路径信号在层析网格内部穿过的截距;X是层析模型内部各个网格的水汽密度值。结合上述方程,将所有GNSS观测表达式转换成矩阵形式为

(3)
式中,S m1×1=[S P1S P2 ·S Pm1]表示所有GNSS斜路径信号上的水汽含量;A m1 ×n= [A P1A P2 ···A Pm1]是指GNSS信号在层析网格内部穿过的截距矩阵;p *和m 1表示实测卫星信号的标号和条数;n表示研究区域内网格的个数。
1.2 约束信息
由于层析区域内存在许多未被导航信号穿过的网格,观测方程大多数情况下是欠定的,一般需要引入额外的约束条件。本文在水平约束的选择上,基于小区域内水汽分布平稳的假设,根据同层各网格对应的水汽值间存在的相关性与相互间距离成反比的原则构建约束方程[ 15],如下
 (4)
(4)
式中,H为水平约束系数阵,采用高斯加权函数方法来建立网格间的参数关系[ 1]

(5)
式中,i、j、k表示待计算网格的顶点位置;in、jn、k表示待计算网格邻近网格的顶点位置;d in,jn,k 2表示两个网格间的距离;σ为水汽平滑因子,可根据研究区域的范围确定。
在垂直方向上则根据水汽分布呈指数分布递减的规律,采用指数相关性构建上下层网格参数间的函数关
 (6)
(6)
式中,xk和x k+1分别代表上下两层的水汽密度参数;Z为上下层的高程差;H为水汽标高,通常取值为1~2 km。根据式(6)建立垂直约束方程,其矩阵形式为
 (7)
(7)
综上所述,可得到传统方法的层析模型

(8)
式中,H m2 ×n和V m3 ×n分别表示水平约束和垂直约束的系数矩阵;m2、m3分别表示水平约束和垂直约束的方程个数.上述模型通常可利用奇异值分解法[ 19](singular value decomposition,SVD)计算矩阵的广义逆来进行求解。
1.3 顾及边界入射信号的水汽层析方程
针对传统水汽层析试验中常常舍弃了许多边界入射信号,导致其蕴含的水汽信息未能被有效利用,文献[10, 13]建立的水汽密度比例因子模型和水汽尺度因子模型均从GNSS SWV的角度解决了边界入射信号的未被有效利用的问题.根据GNSS SWV求解公式可知,PWV (precipitable water vapor)是求解SWV的关键元素,它会随高程的增加而减小,但其中的对流层水平梯度信息是用于描述大气方位不一致的特性,与高程并无明显的函数关系.为此,本文利用探空气球资料直接在PWV与高程间建立联系,再结合水平梯度信息恢复边界入射信号的水汽值,以使得原本被舍弃的边界信号也能参与最终的水汽层析解算.具体实现过程如下:
(1) 利用层析区域内探空站前3天的观测数据,在垂直方向上依次得到每个采集点处累积的PWV及其占整个水汽值的比例γ。
(2) 由步骤(1)所得的高程数据h及其对应的水汽比例数据γ,基于Matlab软件的Curve Fitting Tool进行函数拟合,通过选用不同函数拟合了多天数据进行了对比测试,发现5阶多项式能较好地拟合短期的水汽变化情况,因而本文在此选用5阶多项式得到拟合系数ai(i=0,1,2,3,4,5),建立PWV比例因子与高程的关系式

。
(3) 计算每条边界信号的临界高程h,结合5阶拟合关系式,解得边界信号位于层析区域内部的垂直水汽信息PWVC=PWV·γ。
(4) 利用步骤(3)中的PWVC和式(9)可得到边界信号斜路径上的有效水汽值SWVC(如图 1所示)

(9)
式中,MFw(·)为湿映射函数;e为卫星高度角;Π是水汽转换系数;MF (e)azi为梯度映射函数;G N和GE表示南北方向和东西方向的梯度参数;ϕ为大地方位角.由此可建立边界入射信号的观测方程,其矩阵形式为
 (10)
(10)
式中,A C m4×n为边界信号的系数阵;S C m4×1为边界入射信号位于层析区域内部的有效水汽值;m4表示边界信号的条数。

图 1 计算斜路径有效水汽值> Fig. 1 Calculating slanteffective water vapor value
图选项
综合以上所述,本文提出的顾及边界信号的多模层析模型的解算步骤如下:
第1步,联合式(8)和式(10),引入多模观测数据(GPS、GLONASS、Galileo、BDS),可得到最终的顾及边界入射信号的多模层析模型

(11)
式中,m1=g1+r1+e1+c1;m4=g4+r4+e4+c4;m1,g1,r1,e1,c1表示GNSS组合和G/R/E/C各单系统的层顶入射信号的数目;m4,g4,r4,e4,c4表示GNSS组合和G/R/E/C各单系统的边界入射信号的数目;

第2步,令式(11)中GNSS各单系统观测值的初始权为1,则该模型的权阵可表示为
 (12)
(12)
式中,
 P
H=P
V=I表示水平约束和垂直约束的权阵;
P
H=P
V=I表示水平约束和垂直约束的权阵;

第3步,联合以上,采用SVD方法计算该模型的广义逆后,可求解未知参数
 (13)
(13)
式中,

pinv(·)表示求广义逆;

第4步,计算矩阵残差V
 (14)
(14)
式中,type表示GNSS观测值的类型(GNSS各系统的层顶入射观测值和边界入射观测值)。
第5步,由于GNSS观测值中可能会存在较大的粗差或异常值,将采用Huber法进行迭代选权,以减弱其对最终结果的影响

(15)
 (16)
(16)
式中,σ表示层顶入射的GPS信号的残差中误差;N g=A g1×n TGPS·P g1×1 GPS·A g1×n GPS;tr(·)表示求迹;j为层析模型中某个GNSS观测值;P j k和P j k+1表示该GNSS观测值的迭代k次前后的权值;ω(vj)表示Huber权函数,其形式为

(17)
式中,c为常数,通常可取c=2σ。
第6步,经Huber法更新观测值的权后,继续第3-5步,直到层析模型中未知参数在选权迭代前后的估值保持稳定为止。
2 三维水汽层析试验2.1 层析策略
本文选用香港卫星定位参考站网12个测站在2018年6月1日-2018年6月15日共15 d的数据,采用GFZ分析中心提供的轨道、钟差产品和CODE分析中心提供的电离层产品,基于Bernese软件进行PPP (precise point positioning)数据处理.解算策略见表 1。
表 1 PPP解算策略Tab. 1 PPP calculation strategy
| 参数 | 解算策略 |
| 星座 | GPS/GLONASS/BDS/Galileo |
| 观测值 | PC,LC |
| 频率选择 | GPS/GLONASS:L1 &L2BDS:1 &B2 GAL:E1&E5a |
| 采样率/s | 30 |
| 高度截止角/(°) | 10 |
| 随机模型 | 卫星高度角定权 |
| 卫星天线相位改正 | GPS/GLONASS:PCV.I14,GAL/BDS:PCO |
| 接收机天线相位改正 | GPS/GLONASS/GAL:PCV.I14,BDS:PCO |
| 相位缠绕 | 改正 |
| 潮汐改正 | 固体潮、海潮和极移等 |
| 测站坐标 | 约束(5,5,20 mm) |
| 天顶对流层延迟 | 先验模型:DRY GMF;分段线性估计;映射函数:WET GMF;15 min一次 |
| 对流层水平梯度 | CHENHER梯度模型;30 min一次 |
表选项
研究区域网格划分:纬度方向为22.16°N- 22.56°N,分辨率为0.05°;经度方向为113.87°E- 114.35°E,分辨率为0.06°;垂直方向为0~10400 m,分辨率为800 m,总计832个网格.同时利用King's Park处的无线电探空数据作为水汽层析结果的精度参考。测站分布如图 2所示。

图 2 测站分布 Fig. 2 The distribution of stations
图选项
在本文层析试验中,假定30 min内水汽状态恒定不变,设计了以下4种层析方案进行对比分析:
方案1:仅采用GPS信号的传统层析方法(见图 3(a)),以"GPS"表示。

图 3 4种方案下导航信号入射的三维分布 Fig. 3 Three-dimensional distribution of the incidence of navigation signals under the four schemess
图选项
方案2:采用顾及边界入射GPS信号的层析方法(见图 3(b)),以"GPS+"表示。
方案3:采用G/R/E/C信号的传统层析方法(见图 3(c)),以"GNSS"表示。
方案4:采用顾及边界入射G/R/E/C信号的层析方法(见图 3(d)),以"GNSS+"表示。
2.2 层析区域内有效信号数目与网格空格率分析
采用单一导航系统进行传统水汽三维层析试验时,存在着观测值数目较少和观测值分布不均的问题,导致层析模型内部存在许多未被导航信号穿过的网格,这将大大降低层析结构的稳定性,并直接影响水汽层析的精度,因而本文将观测值数和网格空格数作为评价指标对4种方案进行了对比分析,分别见图 4和表 2。

图 4 统计结果 Fig. 4 Statistics results
图选项
表 2 有效信号数目和网格空格率的统计结果Tab. 2 Statistics of the number of valid signals and the grid spacerate
| 方案 | 信号数 | 空格率(%) | ||||
| mean | max | min | mean | max | min | |
| GPS | 4691 | 5215 | 3587 | 27.05 | 30.77 | 24.04 |
| GPS+ | 7800 | 8302 | 7162 | 10.27 | 16.35 | 7.33 |
| GNSS | 14150 | 16295 | 12262 | 22.85 | 25.36 | 20.55 |
| GNSS+ | 22086 | 27711 | 19177 | 6.04 | 8.05 | 5.05 |
表选项
由图 4展示的结果和表 2给出的统计数值可知:单GPS方案拥有的有效观测值数目最少,空格率最高,平均空格率达到了27.05%;GPS+方案则在单GPS方案的基础上提高了65%的数据利用率,同时使平均空格率降低至10.27%;GNSS方案拥有的有效观测值数目是单GPS方案的3倍左右,平均空格率为22.85%,相对降幅为4.2%;GNSS+方案的有效观测值数目最多,且平均空格率最低,仅为6.04%.为了更清晰地展示两类信号对于网格空格情况的改善效果,本文统计了各层有信号穿过的网格数量,如图 5和图 6所示。

图 5 第152 d (0:00和12:00)各层网格有信号穿过的数目统计 Fig. 5 Statistics of the number of signals passing through each layer of the grid on day152 (0:00 and 12:00)
图选项

图 6 层析期间(2018年DOY 152-166)各层网格有信号穿过的数目统计 Fig. 6 Statistics of the number of signals passing through each layer's grid during the tomography period (DOY 152-166 in 2018)
图选项
结合图 5和图 6可以看到:随着层数的增加,导航信号穿过的网格数目在不断提高,但由于层析区域较小的缘故,上层网格几乎均能被观测值信号全部覆盖到;在相同情况下,多系统组合对应的两种方案的导航信号穿过的网格数目在每一层都会稍微高于基于单一GPS的两种方案,而顾及边界入射信号的两种方案的中下层网格空格情况得到了明显改善.综上可知,多系统组合拥有着更多的有效观测数据,拥有着分布更均匀的观测空间,但观测信号的过多重叠,使得层析空格率改善幅度不大;而增加层析边界入射信号的利用率,能较大地优化层析空格情况。
2.3 层析结果展示与精度验证
三维水汽层析技术通过利用斜路径观测值所携带的水汽信息,具有还原大气水汽分布状态的能力,可为大气科学和气象学研究提供有力的帮助.本文设计了4种水汽层析方案,采用无线电探空资料提供的垂直水汽密度值验证所提方法的可行性和精度,并比较分析引入多模信号和边界入射信号对水汽层析结果改善的差异.本文统计了2018.152至2018.166共15 d每天两个时刻处(0.00和12.00时刻)的数值结果(因第156天12点处缺少探空资料,故不作统计).图 7给出了4种方案分别与探空结果在层析期间各天0:00时刻的垂直水汽廓线对比结果。
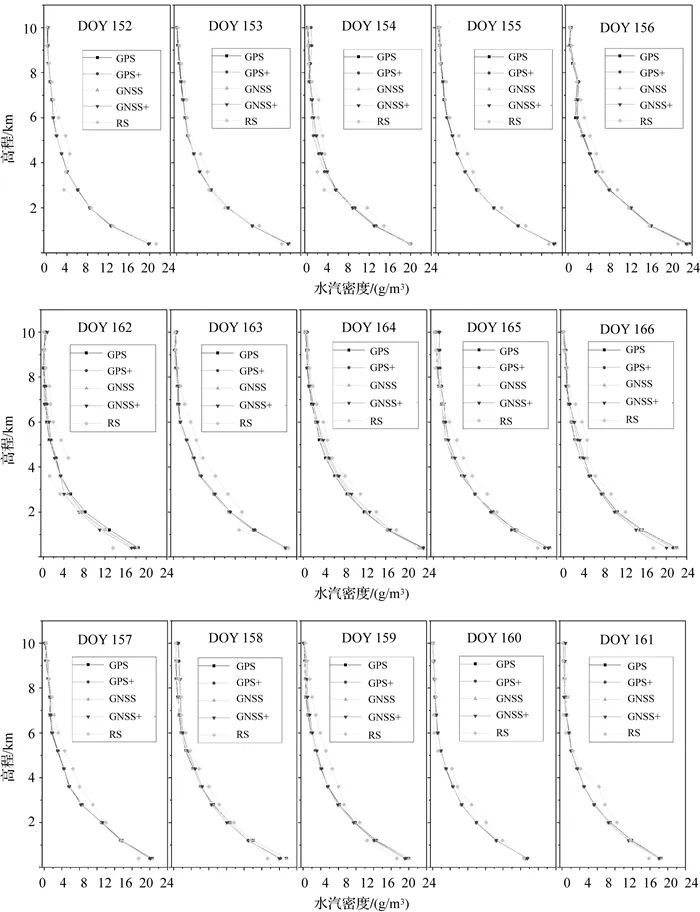
图 7 层析期间(2018年DOY 152-166)于0:00时刻的垂直水汽廓线分布 Fig. 7 Vertical water vapor profile distribution at time 0:00 during the tomography period (DOY 152-166in2018)
图选项
在图 7中,各方案得到的水汽结果均有相同的变化趋势,与探空结果的吻合程度均较高,但是从中能看到:GNSS+方案反演的水汽结果会更加贴近探空结果;GPS+方案的结果虽然有个别时刻反演结果稍弱于GNSS方案,整体上却显著优于两种传统层析方案;GNSS方案与GPS方案的结果十分接近,但前者在各层反演结果处会更偏向于探空结果.图 8为4种方案下在2018年52日12时的整体层析结果.另外,为了更具体地比较不同方案下层析结果的精确性和可靠性,采用了377个样本值用于验证4个方案与探空结果的线性相关程度,结果如图 9所示。

图 8 不同方案下在2018年DOY 152 12:00的整体水汽分布 Fig. 8 Overall water vapor distributions at 12:00 on 152 day of 2018 under different schemes
图选项
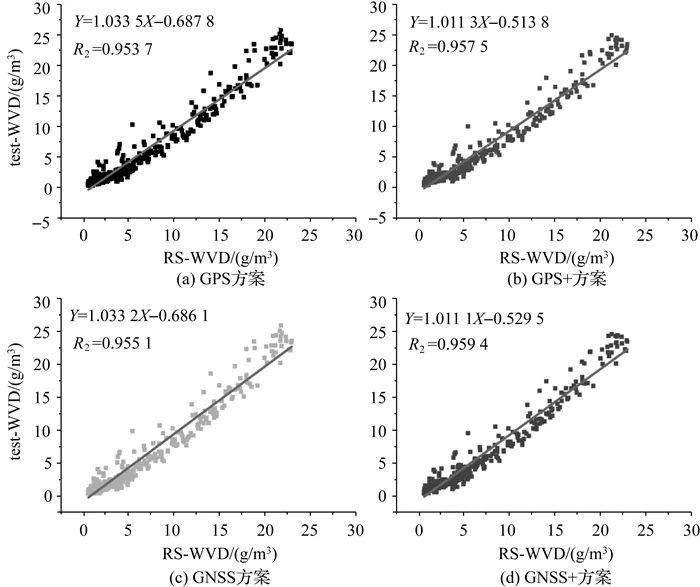
图 9 不同方案下层析结果与探空结果间的线性相关程度 Fig. 9 Linear correlation between the lower layer analysis results of different schemes and the sounding results
图选项
由图 9可知,4种方案得到的结果与对应的参考值均具有较好的一致性,其中GNSS+方案与探空结果呈现出更强的相关性,相关系数达到了97.949%,GPS+方案的相关程度稍差于GNSS+方案,相关系数为97.852%,GNSS方案的相关性为97.729%,而GPS方案相对表现较差,相关性仅为97.658%.图 10和图 11分别为不同方案下整体层析结果与探空结果间MAE (mean absolute error)和RMS (root mean square)结果.不同方案下层析结果与探空结果间的数值统计结果见表 3。
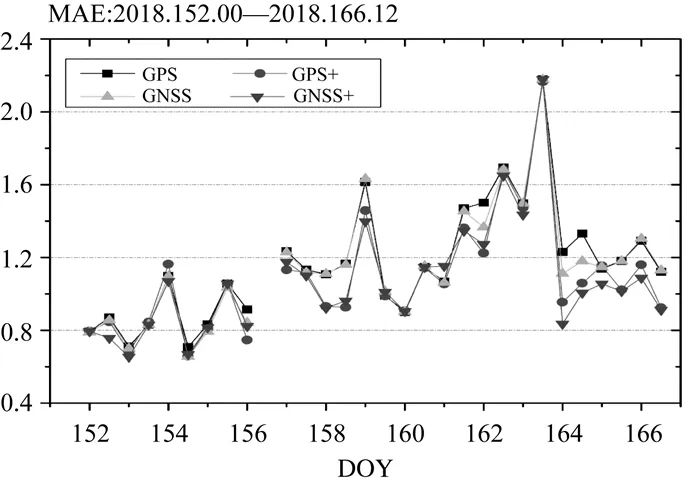
图 10 不同方案下层析结果与探空结果间的MAE值 Fig. 10 MAE sequence between tomography results and sounding results of different schemes
图选项

图 11 不同方案下层析结果与探空结果间的RMS值 Fig. 11 RMS sequences between tomography results of different schemes and the sounding results
图选项
表 3 不同方案下层析结果与探空结果间的数值统计结果Tab. 3 Numerical statistical results between tomography results and sounding of different schemes
| (g/m3) | ||||||
| 方案 | MAE | RMS | ||||
| min | max | mean | min | max | mean | |
| GPS | 0.708 | 2.178 | 1.166 | 0.844 | 2.307 | 1.485 |
| GPS+ | 0.658 | 2.166 | 1.084 | 0.824 | 2.291 | 1.374 |
| GNSS | 0.655 | 2.177 | 1.145 | 0.835 | 2.296 | 1.464 |
| GNSS+ | 0.654 | 2.179 | 1.070 | 0.812 | 2.301 | 1.349 |
表选项
由图 10、图 11可知GNSS+方案对应的结果相对最优,其MAE均值和RMS均值分别为1.070、1.349 g/m3,GPS+方案的精度稍差于GNSS+方案,与GNSS方案基本相当,而GPS方案的精度相对较差,其MAE均值和RMS均值为1.166、1.485g/m3.由此可计算得出,相对于传统单一GPS方案,单独引入边界信号(GPS+方案)和多模信号(GNSS方案)后,整体精度在MAE上分别改进了7.00%和1.79%,在RMS上分别改进了7.46%和1.41%;GNSS+方案在MAE和RMS上分别有8.22%和9.13%的精度提升.另外,GPS+和GNSS+方案的水汽精度和可靠性均优于GPS和GNSS方案,这主要源于边界入射信号对网格中下层空格率的改善程度要高于多模信号。
以上结果在一定程度上验证了多模信号和边界信号均能改善水汽层析结果,相对于多模信号,边界信号的引入能较大地改善网格中下层空格率情况,更能优化层析底部的水汽结果.本文提出的顾及边界入射信号的多模水汽层析方法兼具多模组合和边界信号的优势,可进一步优化三维水汽层析的结果。
3 结论
本文设计了一种融合多模信号与边界入射信号的水汽层析方法,选用香港卫星定位参考站网在2018年6月1日至2018年6月15日共15 d的观测数据和无线电探空结果,验证了所提方法的可行性与精度,并详细对比了引入多模信号与边界信号对水汽层析结果的优化效果.试验结果表明:本文方法充分融合了多模信号和边界信号的优点,改善了观测空间分布和提高了有效观测数据利用率,在RMS、MAE和线性相关性等方面均占有优势,得到了精度更高的三维水汽信息。
目前,本文仅采用单一水汽探测手段进行试验,层析模型底层仍存在很多空格区域,下一步将计划和考虑在水汽层析试验中融入多源数据进行改善,如InSAR数据、微波辐射仪数据、太阳能光谱辐射仪数据和掩星数据等。
致谢:特别感谢GFZ提供的多系统精密轨道和钟差产品, CODE提供的电离层产品, 美国俄怀明大学提供的无线电探空资料, 香港地政总署测绘处的提供香港CORS网监测数据, 瑞士伯尔尼大学提供的GNSS解算软件以及长安大学iGMAS分析中心(CHD)提供的平台支持。

人物 | 测绘学报主编杨元喜院士:珠峰高程测量最高精度从何而来
招聘启事|武汉大学测绘学院诚聘海外优秀人才(2020年)
通知 | 自然资源部地理国情监测重点实验室2020年开放基金申请指南
长图|用生命测量珠峰的中国故事
测绘图书 | 《新型地理计算模式及其在双评价中的应用》实现版权输出
孙文舟 殷晓冬 暴景阳 I《测绘学报(英文版)》(JGGS)精选论文

权威 | 专业 | 学术 | 前沿微信、抖音小视频投稿邮箱 | song_qi_fan@163.com
微信公众号中搜索「测绘学报」,关注我们,长按上图二维码,关注学术前沿动态。
欢迎加入《测绘学报》作者QQ群: 751717395
进群请备注:姓名+单位+稿件编号