本篇于3月9日发表于 石油圈(oilsns) 微信公众平台,欢迎关注!关注 石油圈头条号 ,一起跟踪全球油气行业科技前沿发展动态,聚焦双碳能源转型数字化变革。

利用有效的仪器,可以简化工作流程,减少对个人经验的依赖,进而提高整体可靠性。
作者 | 二丫
钢丝修井作业的常规滑套开关方法能否成功,通常取决于现场工程师的经验与能力。个人判断的任何错误都可能导致非生产时间(NPT),甚至最终造成作业失败。为了重新设计选择性开关滑套的工作流程,斯伦贝谢开发出新型地面采集软件。它利用现有仪器,使用实时数据自动采集系统来简化流程,避免或减少人为错误,减轻现场工程师工作后提交总结的压力。
2022年SPE/ICoTA修井会议上,斯伦贝谢软件工程师Jisheng Li表示:“控制开关工具在很大程度上只能依赖工程师的判断。因为我们要做很多工序,如果弄错了或者做错了步骤,就必须重新开始,因此往往需要很多时间。”
他说,在常规开关滑套作业中,很可能会漏掉接箍,进而浪费大量时间寻找它的位置,甚至可能会找错位置。新型地面采集软件则可根据作业者提供的完井管柱表,对应关联完井管柱深度,创建出类似于套管接箍定位(CCL)记录的通道,从而可以直接在深度测井曲线中实现并排关联。该软件还将完井管柱图与开关工具串的细节展示在同一个图形中,以便实时显示工具管串、目标滑套、接箍的相对位置。
新型地面采集软件允许用户启动自动寻找功能,可在井内几毫米范围内定位并锁定开关键,包括大位移井和浮式装置的修井。每次作业的关键数据都记录在二维图形与自定义的表格中,用户可以生成包括所有相关数据的作业报告。
该软件解决了开关滑套作业中的五个关键挑战:工具串下入的精确深度控制、目标外轮廓的搜索与锁定、绞车搜索、作业报告、故障排除与可靠性提升。
为了解决深度控制问题,斯伦贝谢开发了一种基于完井管柱图的两步关联流程,并将其嵌入到这款软件中,作为开关滑套作业流程的一部分。第一步,该软件将完井管柱图配置文件导入软件系统,并创建数据通道与日志,以帮助与采集数据进行实时关联。然后,它展示出用于深度控制的用户界面,将完井管柱图与工具串的细节和实时移动集成在一起,实现视觉关联与深度控制。
Jisheng Li说,这个过程允许用户实时监控井中工具串的位置与速度。它还简化了将工具下入至预期目标深度的作业,避免了遗漏完井管柱接箍的风险。
针对目标外轮廓的搜索与锁定挑战,斯伦贝谢将工具自动控制嵌入到该软件中,实现了目标的自动寻找、锁定与开关。用户只需输入操作参数,然后该软件即可控制井下工具的作业。
在绞车搜索作业期间,该软件拥有斯伦贝谢所称的“轮廓仪模式”,在这种模式下,软件可以估算开关工具的张开直径。在这种模式下,开关工具所受应力将随着井筒内径的变化而相应改变。通过开关工具所受应力可以估算井筒内径,当绞车起出工具串,以寻找目标时,可根据测得的应力,计算出张开直径。通过对比开关工具的张开直径与不同井段的已知轮廓内径,用户可以知晓开关工具位于井段内的什么位置,以及它是否处于正确的锁定位置。
为了改善故障排除与可靠性问题,斯伦贝谢重点关注了引起井下开关工具串故障的最常见因素——螺线管堵塞,通常会导致无法控制系统中的液压,造成工具模块无法正常工作。该软件通过在电机运行时打开与关闭螺线管来对其进行自动疏通,在工具中积聚足够的压力,将杂物从螺线管中冲走,恢复工具的正常功能。
该软件中增加了一个自动实时报告工具。数据解释模块将工具的作业状态与井下工具的相关数据通道相关联,通过实时测量,来解释与记录关键作业事件。该软件在作业期间,可按时间顺序将事件与相关信息制成表格。用户可以在作业完成后实时使用这个记录表。
Jisheng Li说:“我们希望这款软件能够实时整合开关操作过程中发生的所有事件,它可以自动将所有这些事件记录在日志中,这样工程师就可以查看它,看看是否有什么地方出了问题。如果有什么问题,你就可以查看这个日志,并立即开展故障排除。”
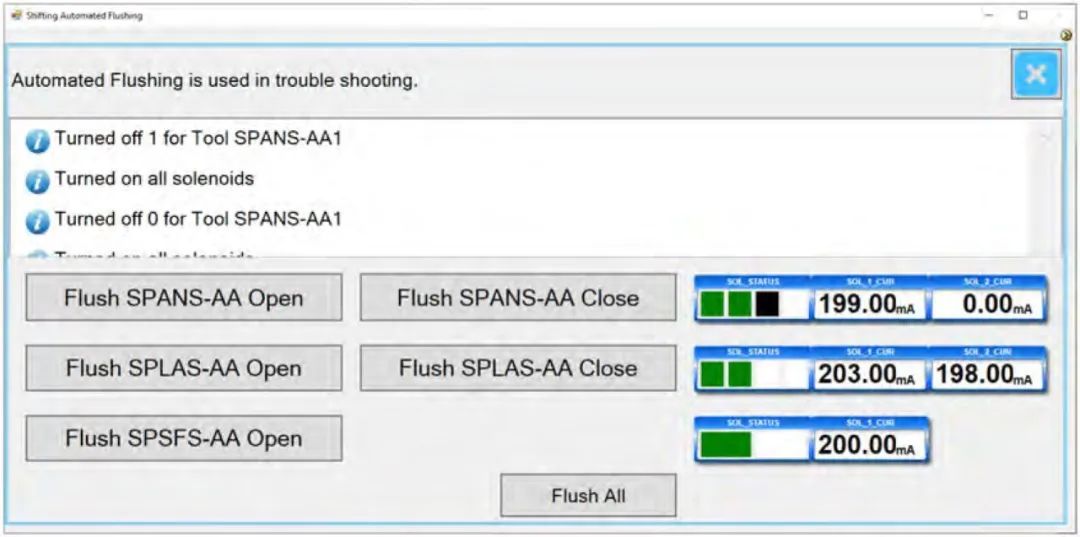
▲斯伦贝谢开发了一种简化电缆修井作业的软件程序,该程序还可以自动冲洗堵塞的螺线管。
01. 案例分析

多年来,石油工程师一直在寻找方法,以克服常规水平井生产测井的不足。具体来说,他们希望该系统能够在各种完井工艺与油藏(包括裂缝性地层)中提供连续的流量曲线。TGT公司的团队通过研发Horizontal Flow系统解决了这些需求,这是一种基于Cascade3技术的新型流量诊断方法。
本次会议上,Jisheng Li介绍了斯伦贝谢对该软件进行系统集成测试(SIT)的结果。测试装置装配了330英尺长的完井管柱,其中包括:7寸油管,4.5寸油管,3.5寸油管,5英尺长的滑套,以及额外增加6英尺长的3.5寸油管。
测试中使用的钢丝工具串包括一个四段牵引器,随后是开关工具模块。完井管柱信息被加载到该软件中。
深度控制面板用于显示完井管柱内的开关工具串。该工具串的位置将根据绞车测量深度与偏移校正来确定。将6英尺长的3.5寸油管末端深度设置为10302英尺的人工深度。
系统集成测试的目标是使用深度控制面板,将工具下入至滑套底部轮廓上方7英尺的位置,然后启动自动搜索/开关流程,以锁定滑套筒,并将其向下移动至打开位置。开启系统集成测试后,将工具串插入油管的井口端。利用牵引器下入工具串。CCL模块穿过7寸油管、进入4.5寸油管时,记录CCL信号。设定牵引器控制参数,当牵引器底部的驱动装置遇到限制时即会停止。关闭第一个驱动装置,而其他三个驱动装置还保持打开状态。该工具串能够继续下入,直到第二个驱动装置遇到限制。
通过打开第一个驱动装置、关闭第二个驱动装置,再次向下牵引,从而继续执行牵引器导航流程。这使得该工具能够继续下入,直到第三个驱动装置遇到限制。打开第二个驱动装置,关闭第三个驱动装置,使该工具向下移动,直到第四个驱动装置遇到限制。
此时,开关工具在搜寻模式下张开,配合使用悬架系统,使其能够压缩以通过限制或扩展至开口中。打开第三个驱动装置,关闭第四个驱动装置。启动牵引器,该工具继续下行,直至牵引器停止。选择更高的牵引力,压缩开关工具,使其通过4.5寸油管,进入3.5寸油管。在搜寻模式下,可以使用轮廓仪功能,来隔离开关工具的液压腔。然后根据压力波动情况就可了解直径的变化。
可使用开关工具的直径变化来测量通径变化,最大为1寸。在该案例中,开关工具的直径从3.9寸被压缩至2.99寸。Jisheng Li表示,这是另一个有助于在完井管柱中定位开关工具串的指标。在4.5寸管柱的末端打开开关工具,它会被压缩以通过该限制,进入3.5寸管柱。
开关工具通过限制后,下一个迹象来源于CCL模块穿过4.5寸油管,进入3.5寸油管。当最底部的驱动装置从4.5寸油管进入3.5寸油管时,牵引器就会停止。执行牵引器导航,第四次也是最后一次驱动突破这个限制。这是开关工具进入滑套前的最后一个迹象。
利用深度控制面板、CCL信号、牵引器驱动装置停止指示器与开关工具内径测量,将开关工具下入至滑套上方5英尺的位置。然后增加工具所受应力,将其用作锚定器,防止工具串在油管内滑动。关闭牵引器的驱动装置。随后,使用自动寻找/开关程序完成开关作业,包括使用预先设定的参数激活工具,使该工具以尺蠖的运动方式向轮廓移动并锁定开关套筒。在这种情况下,需要选择井下方向。开关工具可不停地锁住与移动开关套筒。
Jisheng Li表示,斯伦贝谢最终希望通过软件实现“一键式”操作,不过他指出,这将要求软件通过钢丝作业实现完全自动化。为了实现完全自动化,必须将绞车自动作业纳入工作流程,并且可能需要一种更好融合人工智能的决策方法来识别作业的不同阶段。
Jisheng Li表示,未来还会升级线性驱动装置的位移测量精度,达到亚毫米级的精度。可以通过融合多项测量来实现,包括加速度计测量、牵引器速度、开关工具的泵马达速度以及绞车深度测量。