
阅读文章前辛苦您点下“关注”,方便讨论和分享,为了回馈您的支持,我将每日更新优质内容。

文 | 立财说
编辑 | 立财说
概况
由于半导体批量生产技术的发展和军民两方面的需求,在国际上已经出现了一类新型的微机械惯性仪表,它们具有价格低体积小、重量轻、可靠性高,能承受恶劣环境条件等突出的优点。
在军民两方面《如战术导弹、智能*药弹**、微型卫星、汽车、工业机器人、摄影、录放设备、计算机鼠标以及消费类产品》等有广泛的应用前景,受到世界各国的遍重视,根据现有资料、美国、日本、欧洲以及俄国都已组织力量,积极开展这一领域的研究。
经过多年的努力、技术上已经取得巨大进展。低精度的微机械陀螺仪和微机械加速度计已有产品问世,正在推广应用,向更高精度发展、已经探索出了一些技术途径。
今天我将分别给大家介绍陀螺仪、加速度计以及微惯性测量组合的发展情况,然后比较不同的制造技术。

微机械陀螺仪
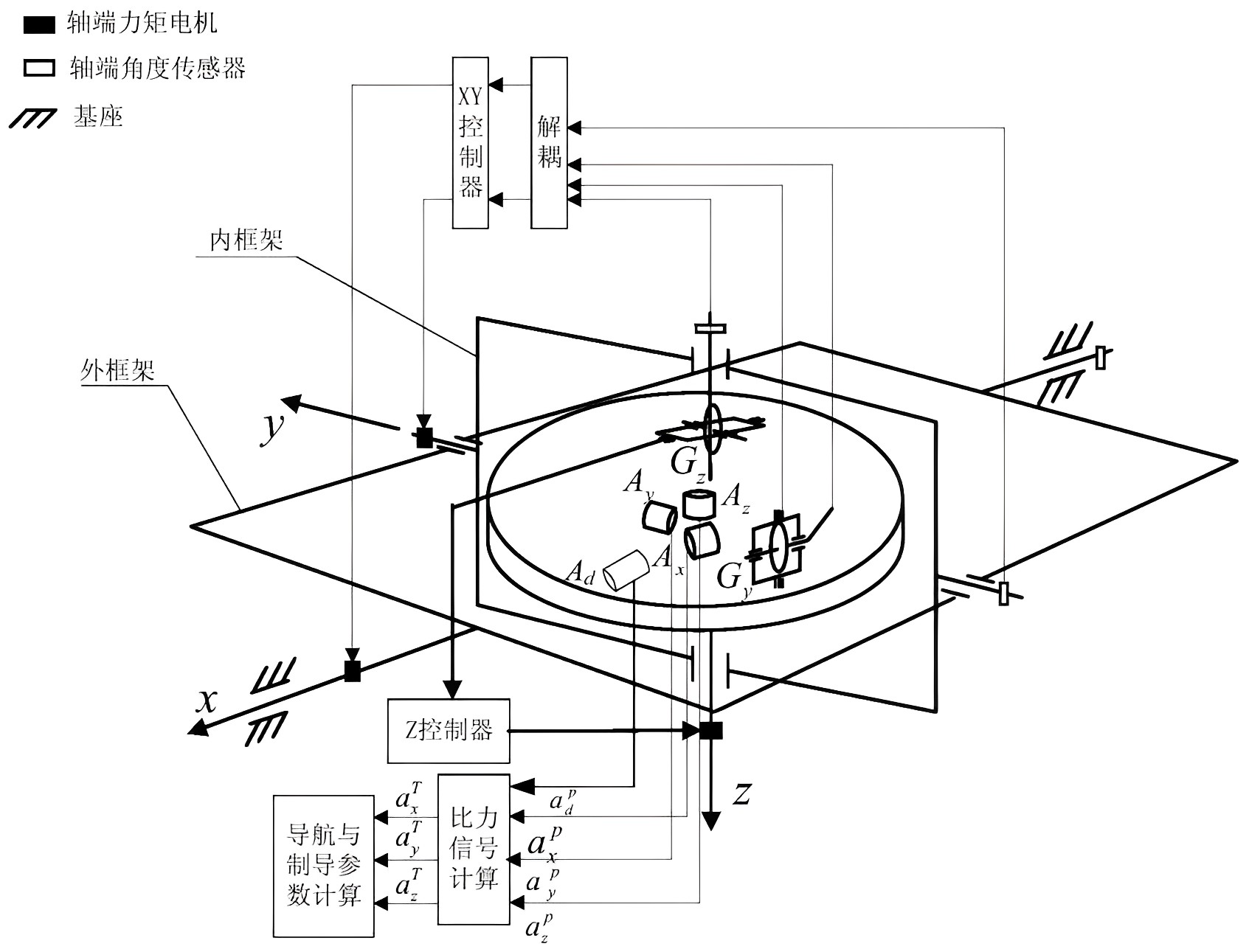
微机械陀螺仪的概念是Draper Lab首先根据振动陀螺的的原理提出来的,他们自1985年开始研究从1985~1991年主要采用框架式角振动方案,它采用内、外环框架结构,内环上有镀金的质量,可以想象为陀螺,外框可以看作马达,两个框架通过一对正交的挠性枢轴连接在一起。
在外框以小角度振动的条件下、当绕框架平面法线有角速度出现时,内框便以外框的振动频率和与输入角速度成正比的幅度振动,这种陀螺仪的最长尺寸为60μmm,外环轴运动由两个埋藏的电极敏感和控制。
内环的运动由两个桥式电极敏感和控制,陀螺工作在力反馈状态,检测和反馈信号加在同一对电极上,借助于不同频率加以分开,为了保持高品质因数(Q值)陀螺需封装在真空盒内工作,在0.4Pa真空条件下,Q值可达2000Pa。
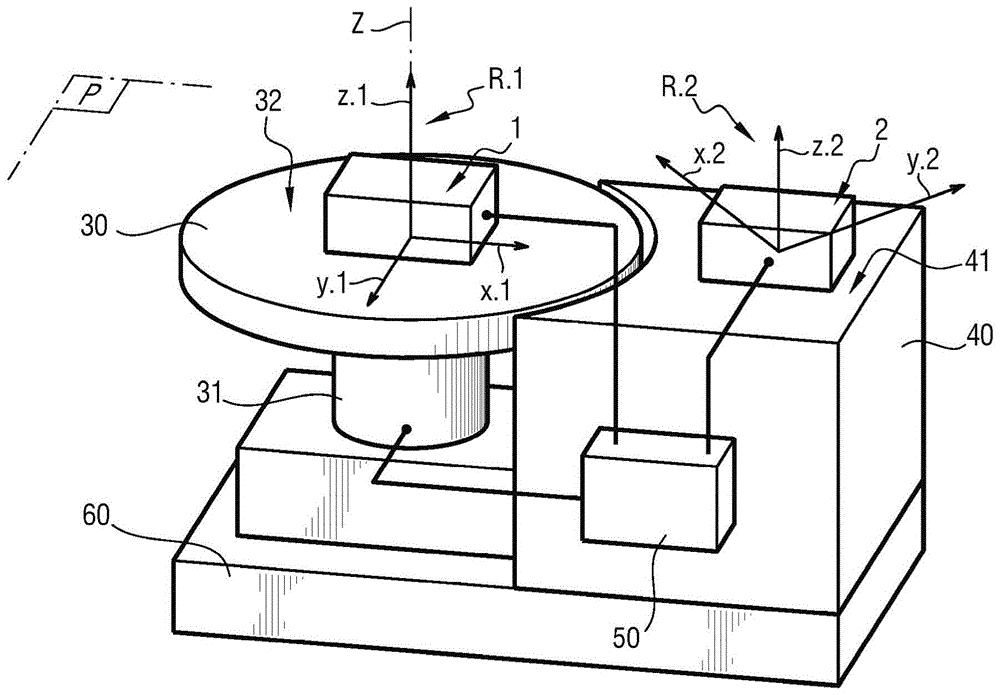
1991年以后,由于Berkeley分校研究成功叉指式梳状谐振器,Draper Lab改用音叉式线振动陀螺方案,如图2所示。
它由一组挠性折叠梁支承的两个试验质量,在梳状驱动器的交变静电力作用下,在平面内做反向音又式振动,驱动器的静电力与质量横向位移关系极微弱,因而能采用大幅度的振动,以提高陀螺的测量灵敏度。
当在试验质量片的平面内,沿与质量振动方向相垂直的轴上有输入角速度时,在哥氏力的作用下,两质量片做上下向振动,其振幅与.成正比,在两质片下方的电容电极敏感这种上下运动,并通过反债回路施加静电恢复力到再平衡电容极板上,以保持质量片在平衡位置。,馈电压经信号处理,可获得与输入角速度成正比的电压。
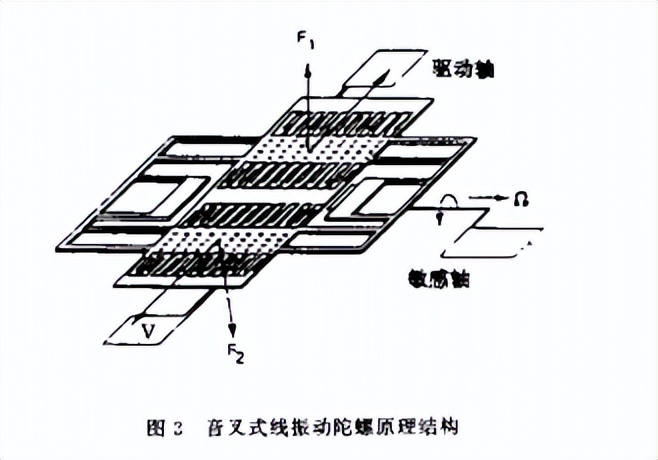
音叉式线振动陀螺的有效尺寸为1mm,音叉振幅为10μm,在13Pa的真空条件下,驱动轴Q值为40000检测轴为5000,电子线路包括驱动器自激振荡回路和敏感轴检测回路两部分。
Draper Lab还探索了振动轮式陀螺(VWOG)如图3所示。
它的半径为1mm左右,是一个平面摆,陀螺的试验质量是轮型结构的外圈,由梳状机构驱动·作旋转振动,定子齿固定在基片上,轮上也有一排梳,还有一组电气绝缘的梳齿作为读出轮子驱动振幅的检测电容。
也可用作反馈传感器、轮予通过四恨梁由中心轴支撑,中心轴又由两根拉杆焊接在派热克斯玻璃基片的两个台柱上,中心轴-扭杆结构是轮了的有效框架,使得驱动和读出运动得到良好的机械隔离。
这样,两种运动的机械参数可以分别优化,而不需要相折衷工作时,给固定的定子梳加正弦驱动电压,轮子产生简谐角振动,在基片平面内,沿垂直于扭杆的方向输入角速度,哥氏力将使轮子绕输出轴作正弦倾斜运动,倾斜运动输出由位于轮子下面的平板电容来测量。
由于VWOG的轮子沿输入轴的质量和面积增加了,所以它的测量灵敏度得到改善,在6GHz带宽条件下,它的角速度分辨率可于0.1Draper Lab,已经包装和试验了200个不同型号的微机械陀螺,经受了8n000g的冲击和离心试验。
1996年4月在室温条件下,已达到为4.4/h(DC~0.1Hz),标度因数稳定性为100pμm,1997年性能目标是,随机漂移~1/h,标度因数稳定性达Vector Ltd正在发展精密的微机械陀螺,已经过论证和仿真试验。
1997年出第一批产品,他们采用音叉式微机械结构、动栅式场效应管高灵敏度检测电路、幅值、频率及相位控制技术,并且将陀螺的机械尺寸放大为9~11>5mm,预计这种精密微械陀螺的性能可与常规陀螺包括DTG、LG及FG相媲美。
日本的几所大学分别与有关公司合作,也开发了几种音叉式振动陀螺,Himeji技学院与多摩川精机(TamagawaSeiki)公司联合开发了一种请振棒式角振动陀蝶,如图4所示。
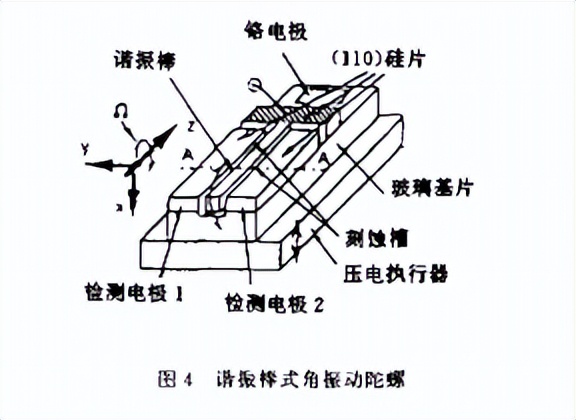
它采用玻璃作为基片,检测电极和谐振棒都焊接在基片上,尺寸为2X5X20mm谐振棒一端固定,在其下方的璃基片上有15m深的槽,槽内淀积一层Cr膜,它与谐振棒一起形成检测垂直幅度的电容器。
玻璃基片放在压电执行器上,两个输出检测电极和谐振棒由硅片,通过各向异性刻蚀而成在谐振棒沿X方向激振的条件下,当绕Z轴有输入角速度时,哥氏力使谐振棒沿Y轴方向振动,其振幅正比于输入角速度,并且由两个输出险测电极和谐振棒之间的电容器测。
由于本陀螺只有一根振动棒,因此它对于线加速度是敏感的,试验样机的分辨率约为ii.irad/5.线性度为满量程的2%标度因数为20mV/trad/s),东北《Tohoku)大学研究出了一种电磁激励的硅谐振式音叉陀螺。
它采用玻璃-硅-玻璃构,如图5所示,音叉通过杆架在两个电流端子上,谐振器在磁场中由洛仑兹力产生音叉振动。
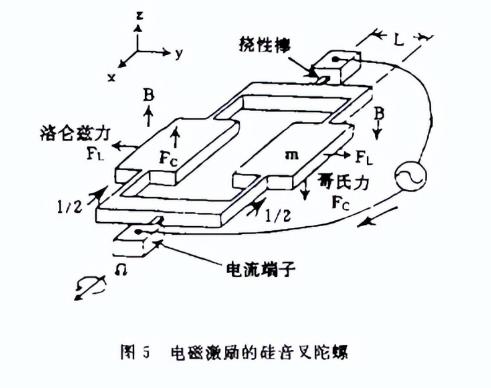
当沿X轴输入角速度时哥氏力起谐振器绕X轴的扭转振动,其振幅正比于输入角速度,振幅由试验质量片与基片之间的电容器测量。
试验装置的灵敏度为0.7F//s3:横滨研究与发展中心村田制作所采用面加工方法,加工出了多晶硅薄片请振器微机械陀螺,如图6所示。
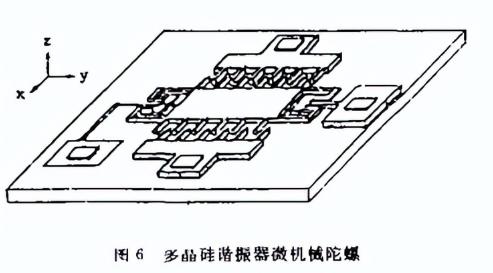
多晶硅谐振器400μm宽《包括两边梳齿),8n0μm长(包括两边的梁》5μm摩由四根梁支承在单晶硅片上,谐振器与基片的间隙为1μm。
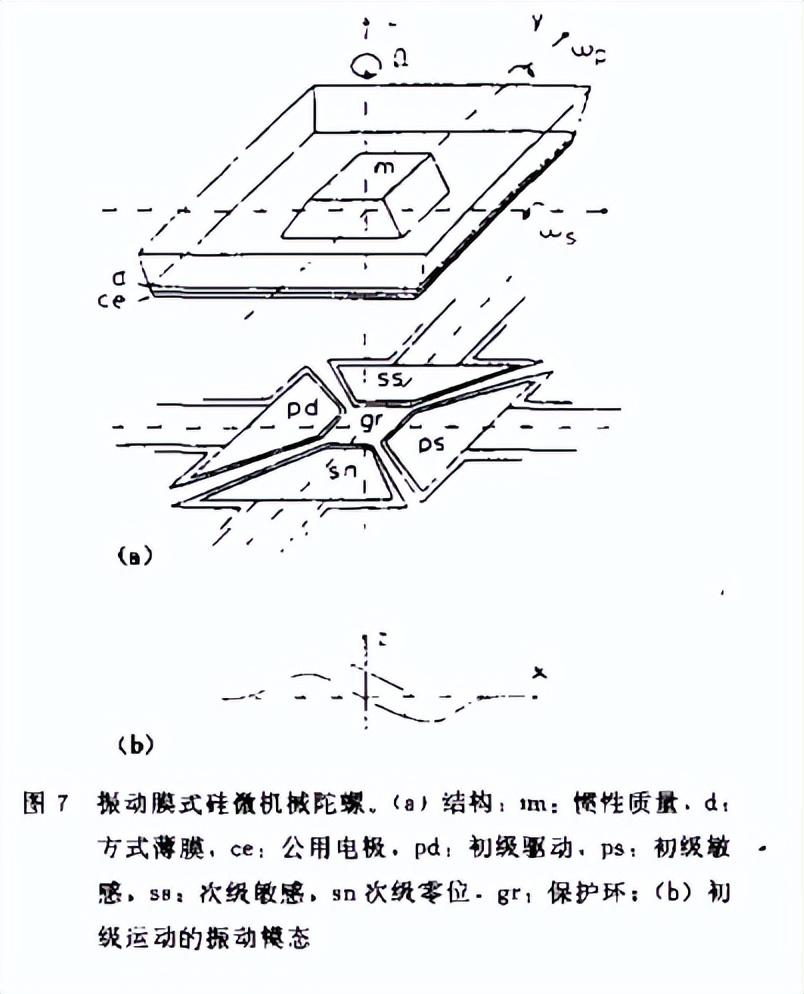
在0.1Pa真空条件下,多品硅谐振器的驱动模态和检测模态的Q值,分别为2800和16000,输入噪声的等价角速率为2/s如图7所示。
棱链惯性质由(1[)硅片湿性刻蚀制成,顶边长720μm,高300μm,位于边长2.9mm、厚约25μm的四方形薄膜的中央,薄膜由掺杂硼的硅通过EDP刻蚀停止形成。
在硅膜上的金属层是四个电容器的公共电极,其余电极蒸链在派热克斯玻璃上,这些电极同时驱动和敏感薄膜的振动运动,公共电极与玻璃基片电极的间限为3μm。
瑞士Neuchatel大学1996年研究出了种硅微机械音叉陀螺,其原理结构与日本东北大学的相似吗,但是激励音叉的电磁力,由恒磁场与流经试验质量片顶部的U型金属导体中的AC电流相互作用所产生。
而且哥氏力采用四根梁上的压阻连接成的惠氏电桥测量,初步试验结果表明,陀螺的灵敏度随着试验质量片的尺寸加大而增加。
在真空密封条件下,振动模态的品质因数可提高4倍,英国Newcast大学和Durham大学合作,1995年研究出了一种振动膜式硅微机械陀螺工作时,惯性质量围绕Y轴振动,如果陀螺的结构是完全对称的,当围绕2轴有空间角速度.出现时,由于哥氏力的作用、将产生绕X轴的次级运动,其倾斜振动角速度由次级检测电容的变化来测量。
当DC置电压为5V真空压力为170Pa时,闭环初级运动振幅为80rad/s,频率为16kHz,品质因数为500,次级谐振频率比初级低600Hz,在100Hz测量带宽条件下,前置放大器等效噪声为0.14/s,这一数字还可以通过增加薄膜/惯性质量、初级运动幅度、DC偏置电压以及品质因数等方法,进一步加以缩小。

微机械加速度计
1977年Stanford大学首先采用微加工技术制造出了一种开环硅加速度计,并且在80年代初形成了商品,但是,这种装置的高动态范围、低振动分离、偏置及标度因数稳定性都比较差,不能满足惯性级仪表的要求。
在80年代后半期,人们开始研究各种力平衡式硅微机械加速度计,并且取得了巨大进展。
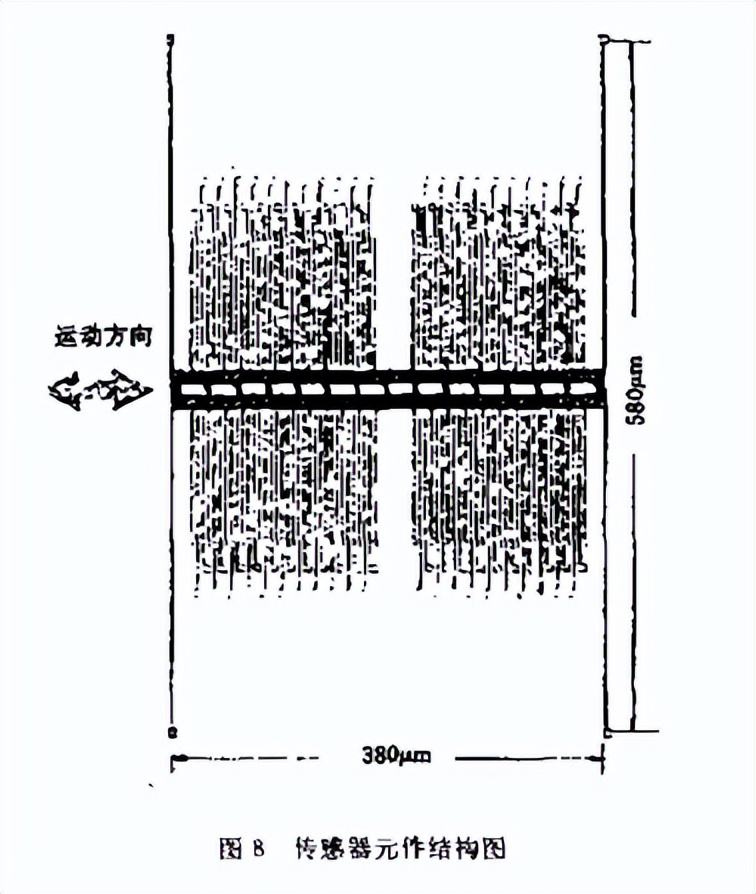
美国AD公司于1989年开始指式电容加速度计(见图8)的研究,1993年投产,现在已经形成系列产品,主要用于汽车安全装置,ADXL50的量程为士50g,分辨率为1gADXL05的量程为士5g,分辨率为10mg。
这种加速度计采用表面加工方法制成,长度为380μm,宽度为580μm,敏感轴与基片平行,试验质量为“H”形电路与微结构集成在一块硅片上。
Berkeley分校于1995年采用表面加工方法,研制出了一种整块式硅加速度计,它的敏感轴与基片垂直,如图9所示。试验质量的尺寸为400X400X2mm,由四根折叠梁支撑在基片上。
二者之间的间隙为1.6μm,折叠梁的最小宽度为2μm,相邻两元件之间的距离至少为1μm,试验质量片上的许多小孔,用来保证在加工末尾能完全刻蚀其和硅表面间的氧化物牺牲层。
四周围的梳齿在有偏置电压的条件下可产生向上的拉力,以平衡电容电压的吸力保持试验质量片在额定位置,试验结果表明,该加速度计的噪声底限为1.6mg/Hz,相当于50Hz输入带宽时,分辨率为113g输入信号达士5g时,噪声频谱与输入幅度无关,因此该加速度计的性能与ADXL50或ADXLO5相当。
法国 SAGEM 公司采用注入氧离子分离(SIMOX)外延薄片上艺,在绝缘的硅基片上实现了面加工的电容传感器加速度计,如图10 所示。
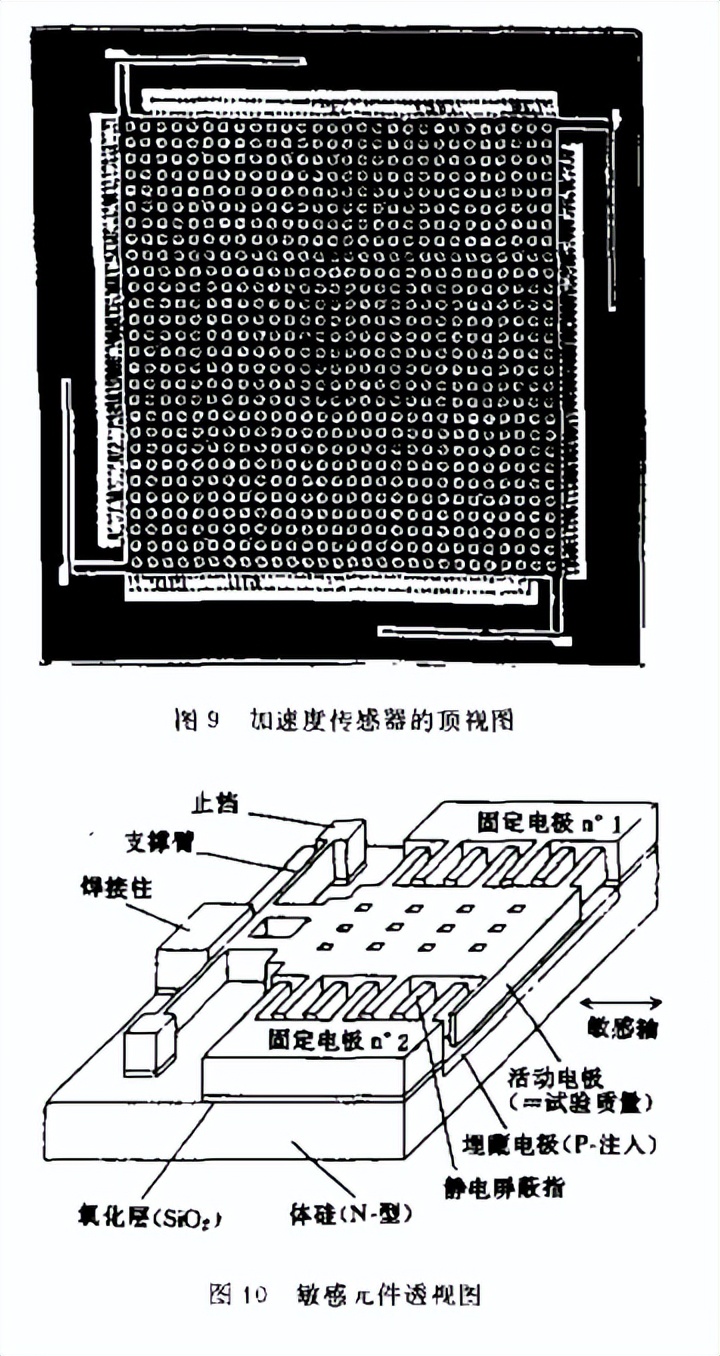
它的尺寸为 1550X12u0x15um,整个结构为外延的单晶硅,电路采用自平衡开关电容电桥测量法,传感器和电路采用倒装式工艺,混合集成为一个整体Draper Lab 1990 年研制整块式硅加速度计,如图 11 所示。
它采用扭杆支撑平板的结构,平板的尺寸为 300X600x3pm3,试验质量位于平板的一端、由蒸镀金属制成、在垂直于装置平面的加速度作用下,平板倾斜。
信号器是平板与基片之间形成的一对差动电容,它们由 100kHz 载波信号激励,从极板输出的电流经过放大和相敏检波作为反馈信号加给力矩器电容极板,产生静电力,使得平板的转角回到零位力矩器,电容极板的平衡电压是输人加速度的闭环度量。
样机经过分度头试验,零偏稳定性为 260pg,标度因数为 73V/g,其重复性为480ppmn。
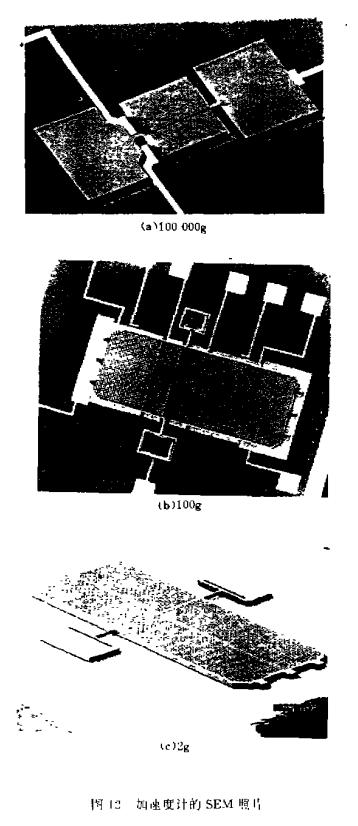
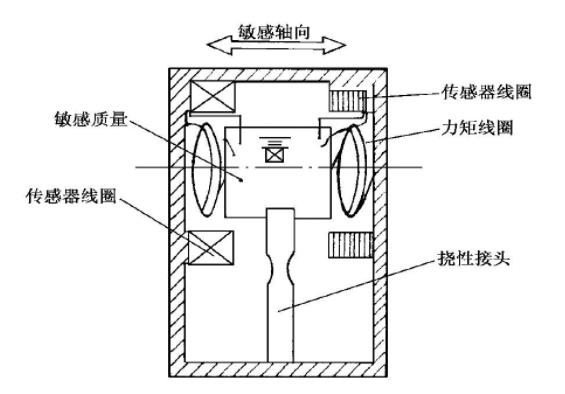
后来,Draper Lab 开发炮弹用微机械加速度计时,其结构工艺有了变化,如图 12 所示。
它有三种不同量程《100 00g,100g 及2g),试验质量和扭杆由一块厚的硅片用薄片溶解法制成,摆的效应由偏心结构产生。试验质址和扭杆通过固定支架片,阳极焊接在派热克斯玻璃基片上。
在玻璃基片上有电容电极、引线及接线片,当有输入加速度时,试验质量绕扭杆转动,引起电极电容变化,该变化量通过交流电容电桥测量,经交流放大和反调制,产生与输人加速度成正比变化的直流电压为开环工作。
其余为闭环工作高动态范围 (0.001~100 000g)的装置用于炮弹,低动态范围 (0.1~1.5g)的为商用。
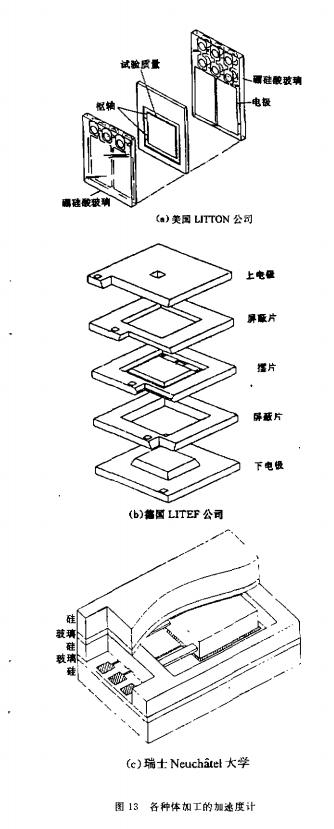
美国 LITTON 公司德国LITEF公司瑞士大学,以及日本日立公司和东北大学采用体加工方法,分别研制成功g级的高精度微机械加速度计。
以传感器为玻璃-硅-玻璃或硅-硅硅“三明治”结构,如图13 所示,LITTON的芯片尺寸为 8.3X5.5X 13mm ,挠性梁的厚度 5um,双边电容气隙7.5pm,检测电路采用交流电容电桥和闭环静电力平衡回路。
试验结果表明,零偏稳定性小于250g,标度因数稳定性优于1000ppm,LITEF的摆片采用四次双面掩蔽,在KOH溶液中由控制时间刻蚀100硅片制造而成,其面积为 6X6mm2。
电子线路采用脉冲调宽、数字输出、闭环控制方案,标度因数稳定性 300ppm,零偏稳定性250ug,这种微机械加速度计已经于 1995 年与IFOG组合成IMU,用于车辆导航Neuchatel的目标是用于空间飞行器,因此它的量程为士0.1g,分辨率在1Hz 时小于 1g。
摆片尺寸为4X4X0.37mm’,悬梁厚度11.5um,长度4mm,宽度1mm,电容电极间隙7um,电路采用自平衡开关电容电桥,采用这种电容平衡桥,其输出电压正比于摆片的偏移,0~1Hz带宽的电容分辨率为 0.04fF,这样可以保证在士0.1g 量程条件下,可检测 ug 级的加速度。
日本日立公司和东北大学研究了一种,脉冲调宽(PWM)何负反馈的单悬梁半导体电容型加速度计,硅片厚度220pm,悬梁厚15um,宽200umn,长800pm,电容器何隙3um,量程士1g,频带 100Hz,标度因数 1040mV/g,非线性误差和侧向灵敏度分别是满量程的士0.1%和+0.5%。
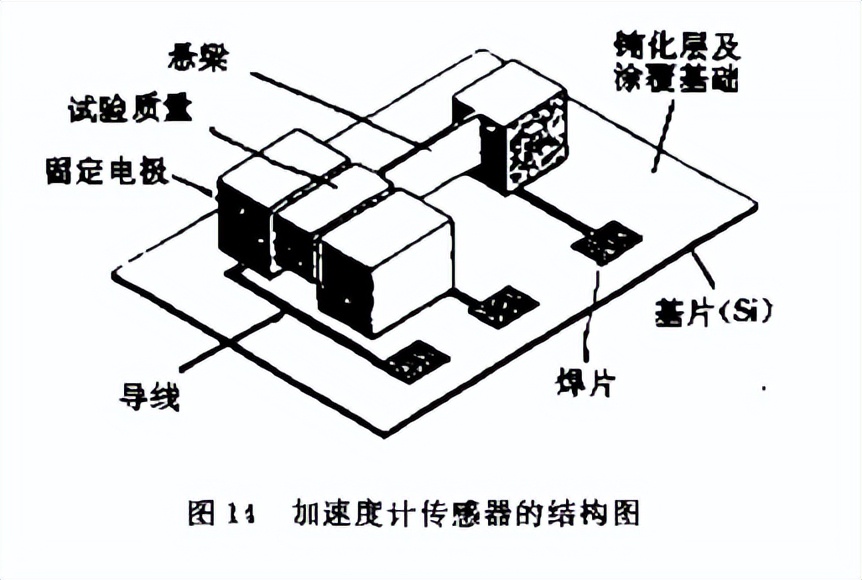
德国Karlsruhe微结构技术研究所,1993年在Karlsruhe原子能研究中心,采用LGA技术加工了一种高精度的加速度计。
后来在1995 年又增加了温度补偿电极,如图 14 所示,悬梁厚10pm,电容电极间隙 4pm.零加速度时的电容量为 25pF,该加速度计采用交流电容电桥测量法,试验结果表明,举程士Ig,标度因数 2.7V/g,频带400Hz/3dB,分辨率 1μg,动态范围110dB,满量程的零偏温度系数2.6X10-4K-1,标度因数温度系数 3.2X10-4K-1。
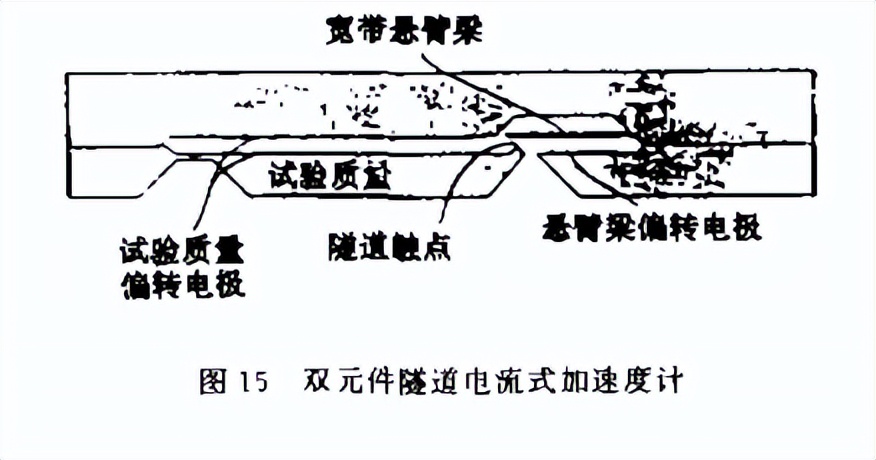
美国加里福尼亚理工学院的 JPL实验室研制了一种基于隧道电流的小型高灵敏度宽频带加速度计,如图15 所示,这是一种双元件硅微机械加速度计,芯片外形尺寸 13 X13mm”。
试验质量为50~260mg由硅弹*片簧**支撑,高频梁厚 4pm,长0.7mm,宽带悬梁在反馈静电力控制下,紧密跟踪试验质量运动,反馈回路频带大于 10kHz,加速度计的信号由反馈回路导出。
试验结果表明,在低频段、标度因数近似为10V/8,在600Hz 时,下降为1300V/g,测量噪声电平4~10Hz 时为 10-g//Hz,在400Hz时,为6X10-%g/√Hz,在70dB 动态范围内,线性度小于 1%。
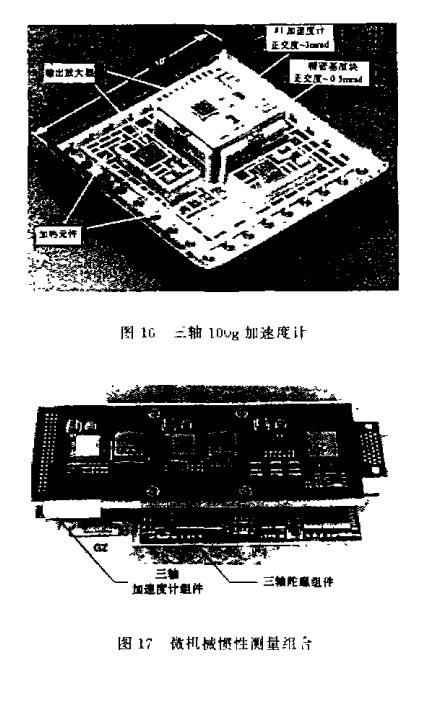
微惯性测量组合Draper Lab 于1994 年研制微惯性测量组台(MIMU),它由六只传感器组成,包括三只微机械陀螺仪和三只微机械加速度计,这六只传感器安装在立方体的三个正交平面上,陀螺仪和加速度计的尺寸都小于1mm,陀螺零偏稳定性为 10-5/h,加速度计零偏稳定性为 2504g整个MIMU的最终尺寸为2X2x0.5cm,重约5g。
MIMU 的电子线路由三部分组成:传感器电路组件、转换电路组件以及数据处理组件,最终目标是将所有功能模块集成在一块硅片上根据目前微加工水平,这种技术方案也许会推迟到 2000 年以后。
目前比较成熟的可以在20U0 年以前得到实用的系统方案是,每一个惯性仪表都配备有自己的专用集成电路和产生相应的输出,然后送给微处理器进行数据处理,产生导航信息。
Draper Lab 已经研制出三轴加速度计,混合包装面积为 2.5X 2.5cm,带前置放大器用于制导炮弹,如图 16 所示,同时,研制出了由三只陀螺仪和三只加速度计组成的 MIMU,如图17 所示。
MIMU与小型GPS 接收机的组合系统如图18 所示,它可以同时提供姿态角、仪表误差标定系数、GPS 接收机辅助功能以及导航参数等信息,第一套组合系统已于 1996 年初提供给延长射程的海军 5 英寸制导炮弹,类似的装置正在试验,计划用于小型战术卫星。
当高密度封装和 ASIC 更造设计实现以后,陀螺校正性能可达 10/ 的尽偏稳定性和士10u”/s 的量程,加速度计校汇性能为 10pg的零偏稳定性和士100g 的量程,工作温度一41~85C。那时,可实现完全小型化的微机械惯性系统叫。
此外,Ruckwell 利Hughes 研究实验室正在开发Eglin AFB的高等战术MIMU,其中加速度计采用面加工单悬臂梁隧道电流传感器,噪声电平分辨率已达8.510-g/ /Hz,动态范围超过10并且。
在此基础上,正在研制隧道电流微机械陀螺仪,预计 5Hz 带宽时,分辨率为 1/h,本项目的主要目标是,开发和证明 15 立方英寸包装的1/h的MIMU,批量生产时,每个固态MIMU的价格低于200 美元。
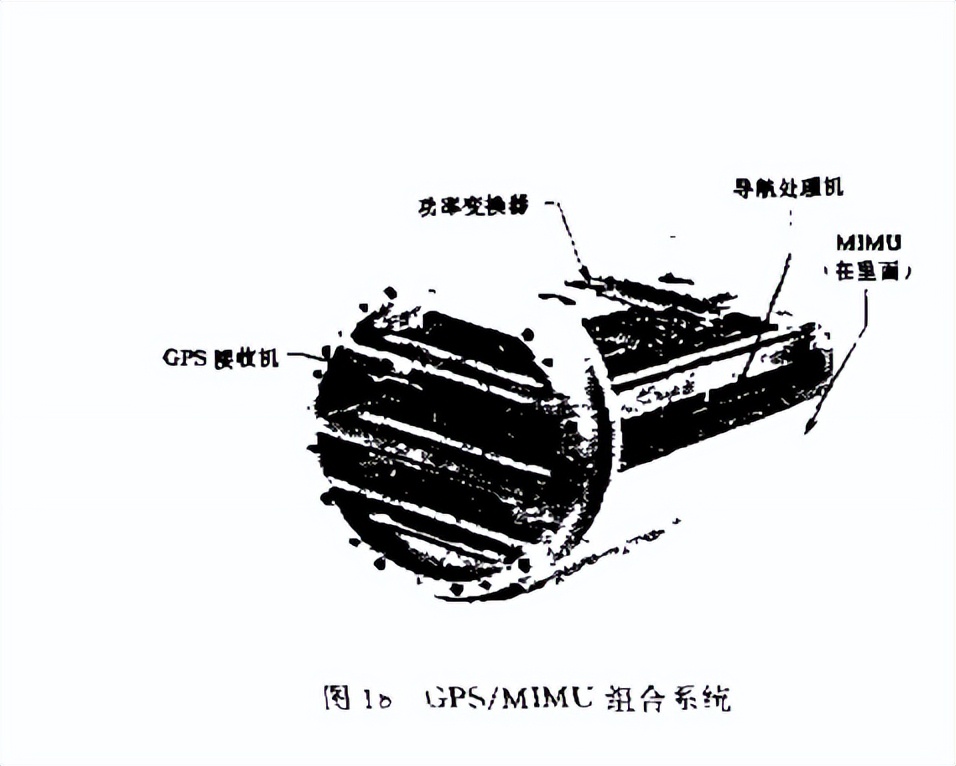
图18

主要的制造技术
目前微机械陀螺仪和微机械加速度计的微浩构加工,AD 公司的叉指式电容加速度计和Berkeley 分权的整决式硅加速度计,以及Draper Lab早期的整块式加速度计,都是用面加工工艺制造的。
但是乳用面加工工艺制造的仪表试验质量比较薄,约为 2pm,面积也比较小,约为 300 x300um2因此,仪表的分率和灵敏度都有限,同时,多品硅薄膜存在较大的剩余应力这些应力对淀积工艺条件比较敏感,而且由于采用牺牲层工艺,漂洗和干燥需要反复多次,容易产生粘附现象,影响成品率。
第二种是体加工技术,它的基础是单晶硅刻蚀技术,传感器通常为玻璃-硅-玻璃或硅-硅硅多层“三明治”结构,中间层的硅微机械结构经过多次掩蔽、双面光刻以及各向异性刻蚀而成。
然后与上下层精密对准,阳极焊接成一个整体。最后采用倒装工艺完成与集成电路的组装。因此,体加工工艺过程比面加工的要复杂、体积大、成本高。
但是,它具有面加工所没有的优点,即所产生的微结构材料为单晶硅机械性能好,可活动结构部分的尺寸增加了,仪表的分辨率和录敏度高,微结构的厚度可达20pm,减小了交叉下扰灵敏度。
总之,采用体加工工艺所得的仪表的性能好,目前 LITONLITEF、日立HITACHI以及速度计都采用体加工工艺,获得了μg的测精度。
为了克服体加工需多次双面处理的缺点,同时保留其所得微结构为较厚(15~20μm)的单晶硅材料的优点近年来,开发出了-类采用SI(Sillicon on lnsulator)基片的技术,它可以得到高质量的单晶硅独立结构,同时保留了面加工具有尺寸小、价格低的批量生产优点。
结论
微机械惯性测量组合已有十多年的发展历史,至今已经取得巨大进展,低精度的仪表已有产品问世,主要用于汽车市场和战术*器武**,向更高精度发展,也已摸索出一些技术途径。
本世纪未形成微型惯性系统是完全可能的,发展军民两用的微机械惯性测量组合,在我国目前优先选用面加工和体加工相结合的SOI 基片工艺的薄片溶解法技术途径,并以此为基础设计仪表的微机械结构、电容式信号传感器、静电力再平衡伺服回路、音叉式梳状静电力驱动谐振器以及相位-频率控制和幅值调节的反馈控制电路。
为了跟踪国际高技术的发展水平和开拓军民两用的惯性仪表的应用市场,我国已经组织好微机械惯性仪表的研制力,围绕其中的关键技术以及材料、特殊工艺和微机械惯性仪表设计等方面开展工作,力争突破微型惯性仪表的关键技术。
目前,已经完成微机械陀螺仪和微机械加速度计的微结构的初步设计,正在进行工艺试验和加工,同时,正在进行有关电路的设研究,预计在各方面的大力协同下,不久将取得初步成果。