
半个世纪以来,机器人一直是工业 3.0(前数字自动化时代)的核心。随着世界过渡到工业 4.0 的数字自动化时代,它们将同样重要,甚至更重要。

大型六轴铰接机器人焊接汽车和卡车车身的形象在 1970 年代和 80 年代成为流行的想象。从那时起,铰接式机器人通过对机器人本身的许多改进以及更多末端执行器(手臂末端工具)的开发,遍及重工业并超越重工业,以满足对灵活自动化的更广泛需求。
铰接式机器人用于医疗保健、食品和饮料、炼钢和仓储等各个领域——只要有重复性或环境或符合人体工程学的挑战性任务,就可以更快、更可靠和或更经济高效地完成任务。

最初,这场机器人革命为汽车制造商等主要制造商提供了更大的规模经济,但对大多数中小型企业没有任何帮助。笛卡尔机器人(线性)、SCARA 和 delta 机器人以及协作机器人的最新发展使几乎任何规模的企业都可以使用自动化。
每种类型的机器人都有优点和局限性。对于机器人技术的新采用者来说,了解这些可能性和陷阱很重要。

机器人带有 1-7 个轴,每个轴提供一个自由度。两轴笛卡尔龙门架通常在 XY 或 YZ 轴上绘图。三轴机器人具有三个自由度,并通过 XYZ 轴执行其功能。这些小型机器人在形式上是刚性的,不能倾斜或旋转,尽管它们可以附有可以旋转或旋转或适应小型有效载荷形状的工具。四轴和五轴机器人具有额外的旋转和倾斜灵活性。六轴关节机器人有六个自由度——可以灵活地向任何方向移动物体或向任何方向旋转物体。当应用程序需要对对象进行复杂操作时,通常会选择后一种类型。第七轴允许在一个轴上扩展范围。换句话说,它允许六轴关节机器人位移。
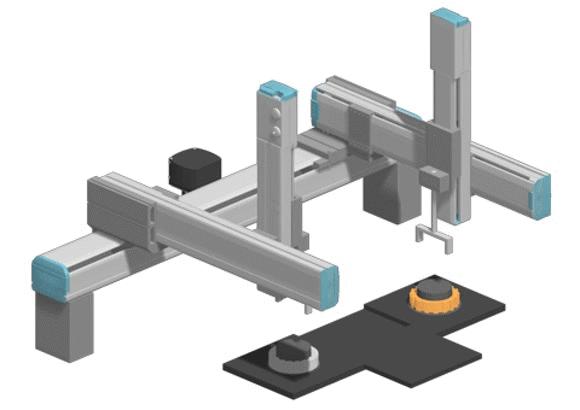
笛卡尔机器人
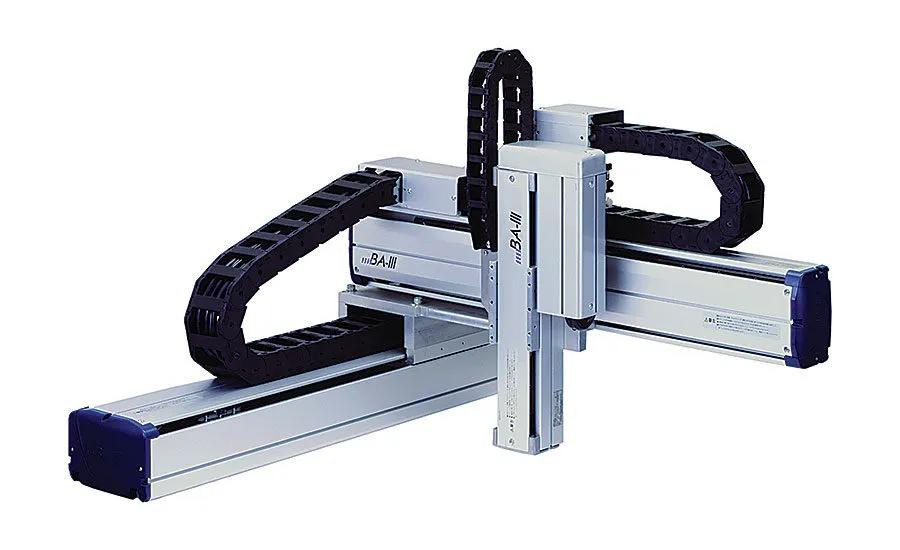
笛卡尔机器人或线性机器人由一组线性执行器组成,有时还包括位于手臂末端的旋转执行器。笛卡尔机器人是完全适应的。每个轴的行程和大小可以根据应用程序进行定制。它的作用范围和有效载荷是相互独立的,而不是相互交织的。线性轴有多种设计,可进一步适应其执行的功能。例如,齿形带致动器允许高速度,而滚珠丝杠致动器允许高精度和高进给力,拾取速率高达 100/min 是相当典型的。
这些搬运系统的适应性使其价格优化,适用于不需要关节机器人灵巧性的各种直接应用。这可能涉及极轻到极重的部件放置、分类或装箱、设备检查等等。笛卡尔机器人的另一个主要优势和区别在于其出色的空间经济性。它允许完全访问它占用的足迹。没有死空间或奇点。安全要求不那么严格,因此成本较低,因为机器人的工作范围仅限于其较小的工作区域。

由于执行器沿工作空间坐标系轴移动,电机位置的插值不是确定空间中机器人手臂末端位置的强制性要求。换句话说,不需要反向运动学的计算。系统 PLC 通常可用于直接控制每个轴,无需添加第二个控制器。

笛卡尔机器人的主要限制是比较不灵活。它将轻松适应三个轴和第四个旋转轴的线性运动。但是,必须添加运动控制器才能执行更复杂的同步任务,例如 CNC。笛卡尔机器人很少用于冲洗环境,因为它们不能提供足够的防水保护。

最后,笛卡尔机器人如果在没有单独的运动控制器的情况下使用,可能需要比其他机器人类型更多的编程时间。示教器不太常见,因此序列编程必须在 PLC 中完成,每个轴都单独寻址和调试。
SCARA 机器人

SCARA(选择性顺从关节式机械臂)机器人专为轻型应用而设计和优化。它们是铰接式机器人的简化版本。它们非常擅长将组件插入公差严格的空间等功能,同时在此类运动中保持其刚性,这使它们成为拾取和放置应用以及小零件处理中具有成本效益的选择。使用制造商提供的示教器,编程和调试相对简单快捷。

SCARA 机器人需要专用的机器人控制器,并且通常仅限于三个轴。它可能是可以使用其全部功能(三个或四个自由度)的最佳解决方案。如果工作只需要两个(例如水平和垂直运动),SCARA 机器人就不能简化为双轴系统,从成本和性能的角度来看,它都没有笛卡尔龙门式机器人那么有吸引力。与多关节机器人一样,SCARA 机器人的占地面积也比工作区延伸得更远,从而导致设备内部和周围功能空间的损失。

台达机器人

Delta 机器人主要以速度着称,拣选速度高达 300/min。其安装类型将其置于其工作区域上方,从而限制了占地面积的损失。它通常与视觉系统配合使用,可以在更复杂的分拣和包装应用中随机挑选物品。就像关节式和SCARA机器人一样,它通常会配备一个示教器,以便于编程。
Delta 机器人的有效载荷能力通常远低于替代技术,而且其反向三脚架设计使其不如其他机器人选项稳健。

delta 机器人的工作范围有限,因为它的设计不允许长距离。与笛卡尔机器人和 SCARA 机器人一样,delta 机器人通常仅限于四轴,无法提供关节机器人的灵活性。
协作机器人
通过允许工人和机器人之间的直接协作,协作机器人(cobots)为我们对如何将自动化集成到工业中的理解增加了一个维度。

协作机器人可以是铰接式、笛卡尔式、SCARA 或 delta 机器人,但大多数都被归类为铰接式机器人。它们的有效载荷能力为 4-35 公斤。协作机器人与其他机器人的不同之处在于它们内置的安全功能,允许与人类直接互动,而无需防护罩、安全窗帘或其他安全功能。

由于它们不需要固定的外部安全屏障,一些协作机器人可以安装在移动平台上,去任何需要的地方。需要注意的是,必须对应用程序进行安全评估,虽然协作机器人本身可能是安全的,但如果在其手臂末端使用的工具是锋利的,则可能需要外部安全屏障。

协作机器人的最大价值在于,它们可以将熟练员工从工作中的琐碎方面解放出来,专注于高价值方面。例如,在需要灵巧的人机交互的复杂设备组装中,协作机器人可以执行简单的搬运或制造任务以支持工人,然后他们可以专注于充分利用他们的技能或知识的工作部分。

各种机器人技术的普及使各种规模的企业都能获得工业 4.0 和数字自动化的好处。机器人的最佳选择通常归结为最适合的机器人——不仅在应用的技术要求方面,而且从生产力、工厂安全、空间利用、成本等相关问题的角度来看。
