一、前言
本示例比较了用于同时估计多个目标的距离和速度的三角扫描调频连续 (FMCW) 和多频移键控 (MFSK) 波形。MFSK波形专为高级驾驶辅助系统(ADAS)中使用的汽车雷达系统而设计。它在多目标场景*特中**别吸引人,因为它不会引入幽灵目标。
二、三角扫描FMCW波形
在该示例的后半部分,使用三角扫描FMCW波形同时估计目标车辆的范围和速度。
虽然三角扫描FMCW波形很好地解决了单个目标的距离-多普勒耦合问题,但在多目标情况下其处理变得复杂。下一节显示三角扫描FMCW波形在存在两个目标时的行为。
该场景包括一辆距离雷达 50 m 的汽车,沿与雷达相同的方向以 96 公里/小时的速度行驶,以及一辆 55 m 外的卡车,以 70 公里/小时的速度沿相反方向行驶。雷达本身以 60 公里/小时的速度行驶。
接下来,模拟来自两辆车的雷达回波。FMCW 波形的扫描带宽为 150 MHz,因此距离分辨率为 1 米。每次向上或向下扫描需要 1 毫秒,因此每次三角形扫描需要 2 毫秒。请注意,只需一次三角形扫描即可执行关节范围和速度估计。
虽然系统需要150 MHz带宽,但最大拍频要小得多。这意味着在处理端,可以将信号抽取到较低的频率,以减轻硬件要求。然后使用抽取信号估计拍频。
现在有两个来自向上扫描的节拍频率和两个来自向下扫描的节拍频率。由于来自向上扫描和向下扫描的任何一对搏频频率都可以定义目标,因此范围和多普勒估计有四种可能的组合,但其中只有两种与实际目标相关联。
剩下的两个是通常被称为幽灵目标的东西。真实目标和鬼目标之间的关系可以用时频表示更好地解释。
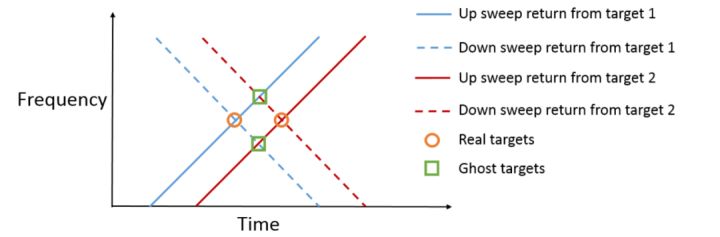
如图所示,向上扫描回波和向下扫描回波的每个交点都表示可能的目标。因此,区分真实目标和幽灵目标至关重要。为了解决这种模糊性,可以传输具有不同扫描斜率的其他FMCW信号。由于只有真正的目标才会在时频域中占据相同的交集,因此解决了歧义。但是,这种方法大大增加了处理复杂性以及获得有效估计所需的处理时间。
三、MFSK 波形
多频移键控(MFSK)波形[1]是为汽车雷达设计的,可实现多目标情况下的同步测距和多普勒估计,而不会落入鬼目标的陷阱。其时频表示如下图所示。
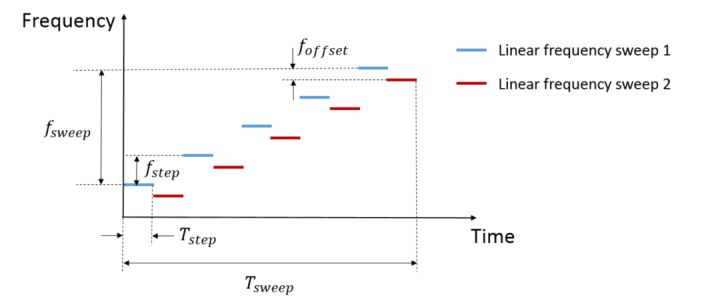
该图表明,MFSK波形是两个具有固定频率偏移的线性FMCW波形的组合。与常规FMCW波形不同,MFSK以离散步骤扫描整个带宽。在每个步骤中,传输单频连续波信号。由于每个步骤中有两个音调,因此可以将其视为频移键控(FSK)波形。因此,FMCW波形中有一组距离和多普勒关系,FSK有另一组距离和多普勒关系。将两组关系组合在一起有助于解决距离和多普勒之间的耦合问题,无论场景中存在的目标数量如何。
以下部分模拟上一个示例,但改用 MFSK 波形。
四、使用 MFSK 波形进行端到端雷达系统仿真
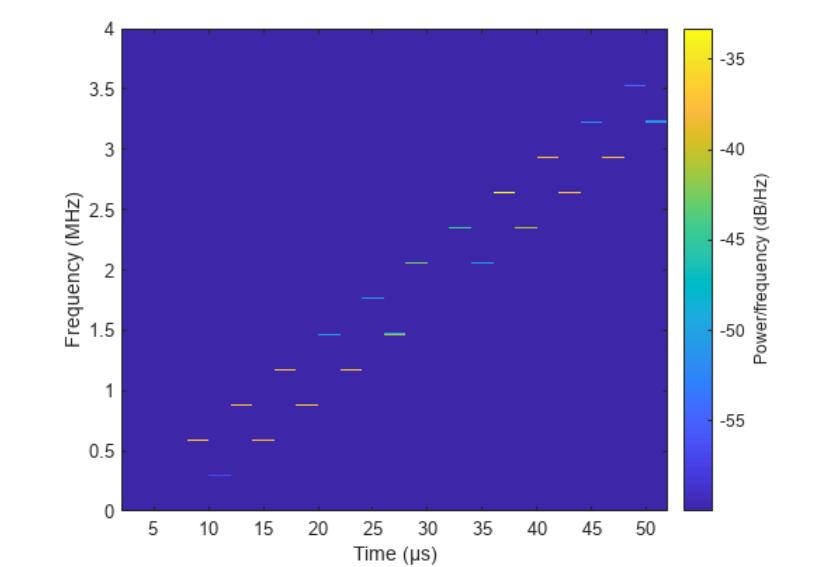
首先,参数化MFSK波形以满足[1]中指定的系统要求。由于距离分辨率为 1 m,因此扫描带宽设置为 150 MHz。此外,频率偏移设置为[1]中规定的-294 kHz。每个步骤持续约 2 微秒,整个扫描有 1024 个步骤。因此,每次FMCW扫描需要512个步骤,总扫描时间略高于2毫秒。请注意,扫描时间与前面部分中使用的FMCW信号相当。
下图显示了波形的频谱图。它被放大到一个小的间隔,以更好地揭示波形的时频特性。
接下来,模拟系统的返回。同样,只需要一次扫描即可估计范围和多普勒。随后的处理在每个步骤结束时对返回回波进行采样,并将采样信号分组为对应于两次扫描的两个序列。请注意,结果序列的采样频率现在与每一步的时间成正比,与原始采样率相比要小得多。
与FMCW信号一样,MFSK波形在频域中处理。下图显示了对应于两次扫描的接收到的回波的频谱。
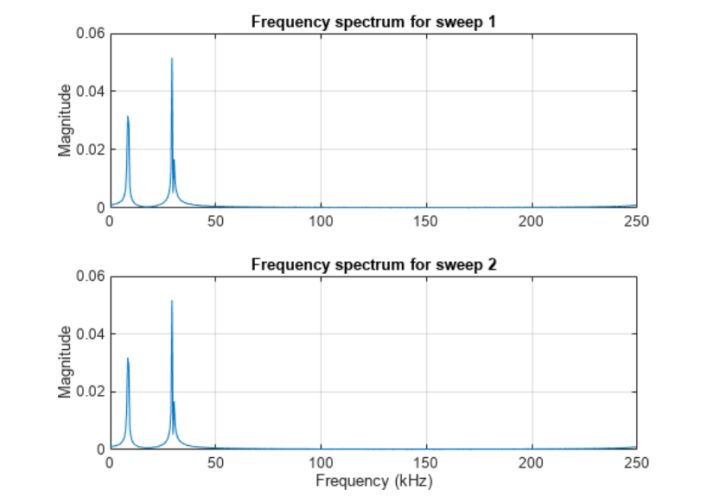
请注意,每个频谱中有两个峰值,表示两个目标。此外,两个回波中的峰值都位于同一位置,因此没有幽灵目标。
为了检测峰值,可以使用CFAR检测器。一旦检测到,就会在峰值位置计算拍频以及两个频谱之间的相位差。
最后,使用拍频和相位差来估计范围和速度。根据您构建相位差的方式,方程略有不同。
估计的范围和速度与真实范围和速度值非常匹配。

五、总结
本例显示了两种同时进行距离和速度估计的方法,使用三角扫描FMCW波形或MFSK波形。本例表明,当存在多个目标时,MFSK波形比FMCW波形具有优势,因为它在处理过程中不会引入鬼目标。
六、参考文献
[1] Rohling, H. and M. Meinecke. Waveform Design Principle for Automotive Radar Systems , Proceedings of CIE International Conference on Radar, 2001.
七、程序
程序获取:【程序】基于matlab使用 MFSK 波形同时估算范围和速度
程序大全:Matlab和Simulink仿真程序汇总(2022年汇总,持续更新中)