今天主要是以实例介绍MATLAB的Simulink虚拟子系统和非虚拟子系统、使能子系统和触发子系统。
1.虚拟子系统和非虚拟子系统
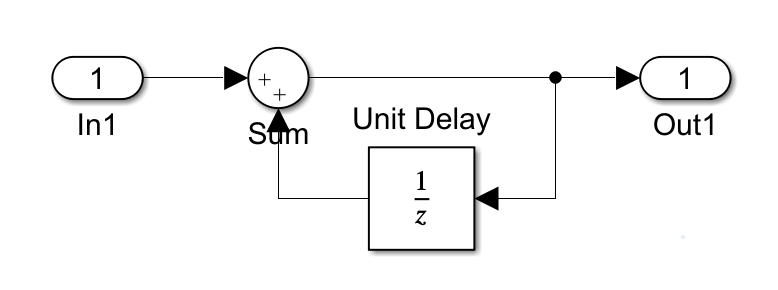
利用Simulink标准模块搭建一个计数器模型,如图所示。采样步长设置为1,利用单位延时模块(Unit Delay)使得当前时刻的输入值与前一时刻的累加结果相加,从而实现计数器的功能模型。
实例1 计数器模型
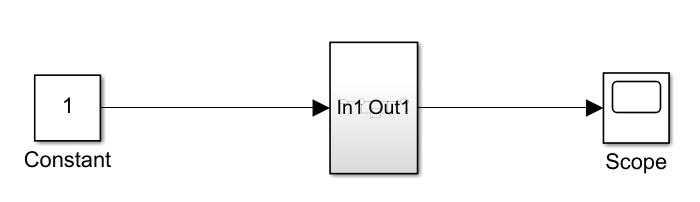
选中模块后按下Ctrl+G将其封装为虚拟子系统。将模块组合创建为虚拟子系统可以增强模型的可读性,方便进行模型的管理,分层管理与可视性,并不影响系统的执行时序和采样时间,也不会对模型生成代码时造成任何影响。创建为子系统之后模型上层如图所示。
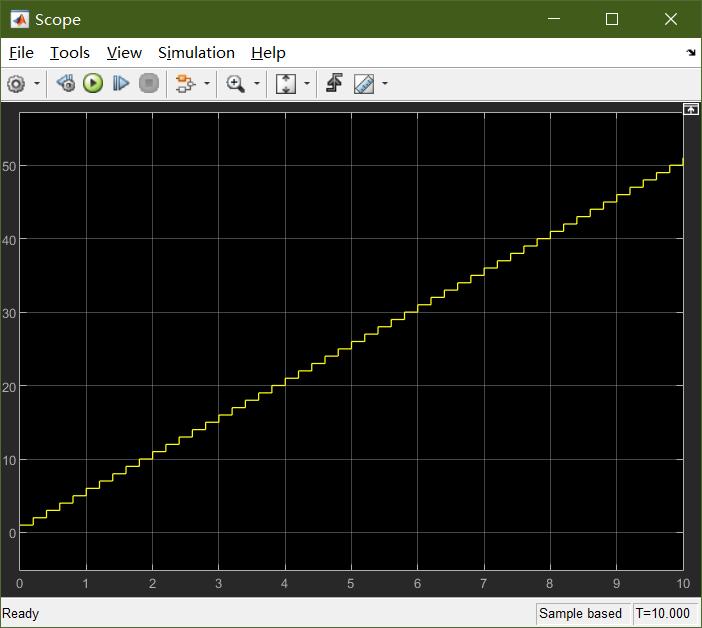
示波器的输出
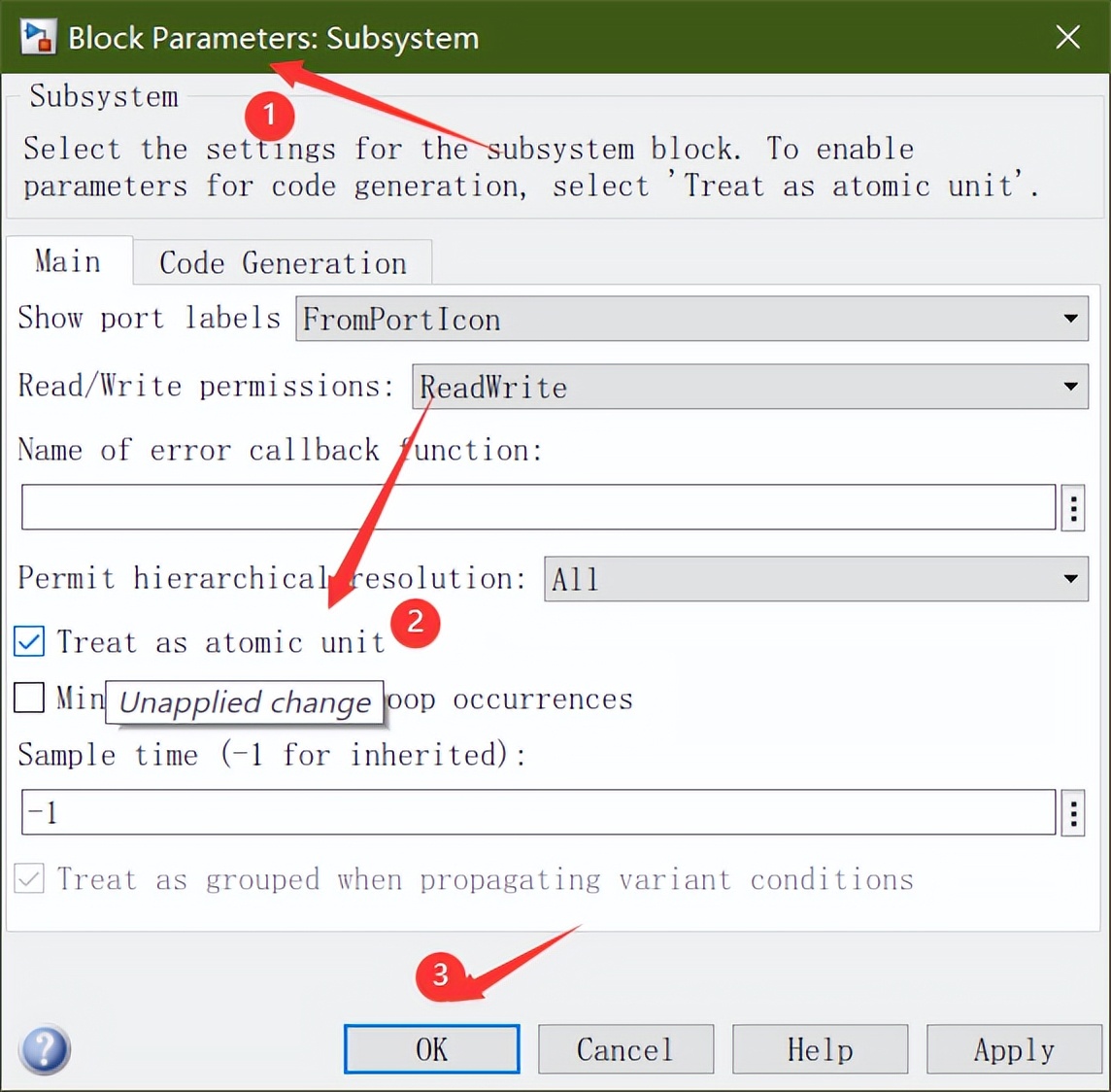
右击子系统在右键菜单中选择Block parameters,在出现的对砧泄中勾选 Treat as atomicunit,虚拟子系统即成为原子子系统(非虚拟子系统),子系统图标黑色外框加宽,此时子系统可以整体设置采样时间,如图所示。
2.使能子系统
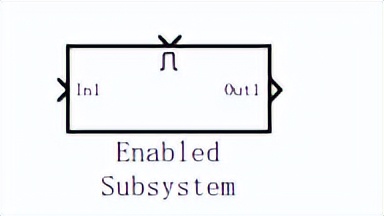
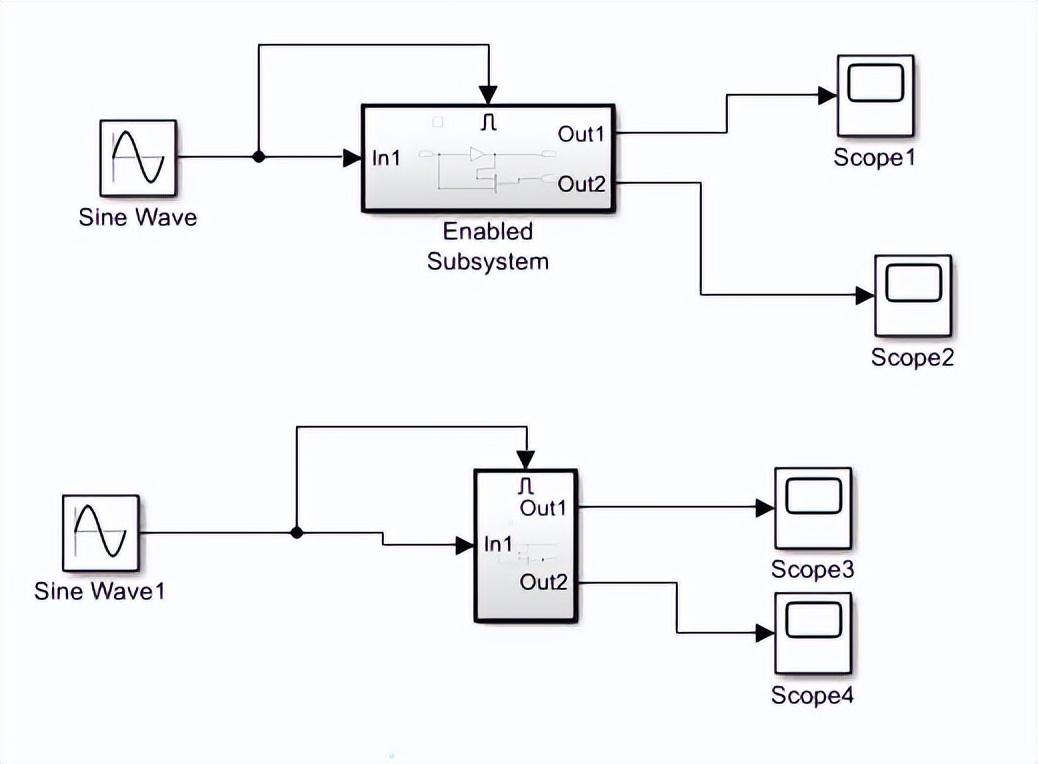
如果需要将一个普通的子系统转变为使能子系统,则可以将Simulink模块库中的Ports&Subsystem库文件中的Enable模块放置到子系统中,这时子系统将增加一个使能信号输入端。也可以从相应的库中将Enable Subsystem子系统模块放置到模型文件中,这样也能创建使能子系统。使能子系统将依赖于使能信号的输入的情况执行,一般地,使能子系统仅能在使能信号大于0的时候才能够运行。如果使能信号不大于0,则子系统根据Enable模块的设置,决定是否保持输出或者归零。

Enable模块
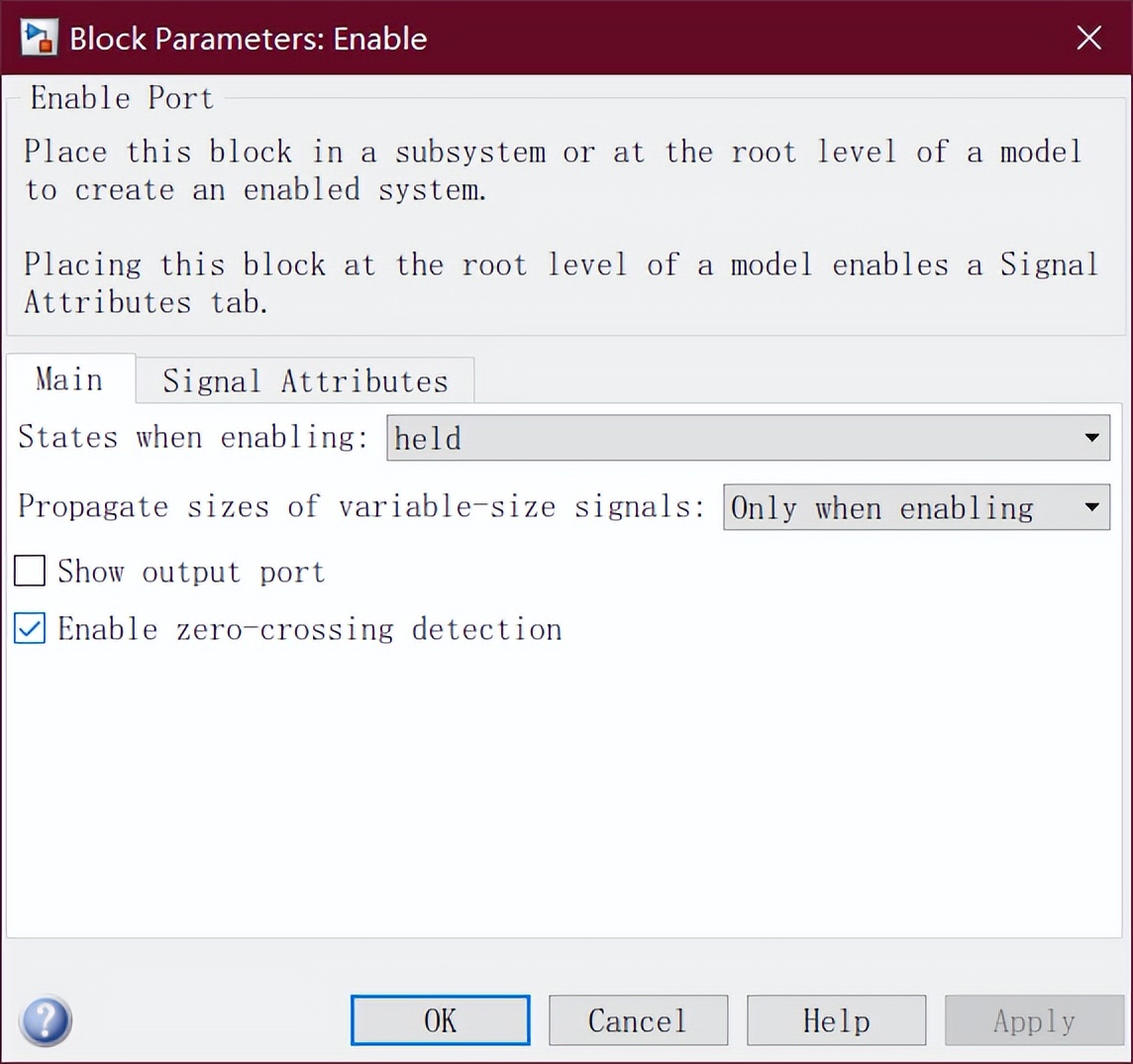
模块参数
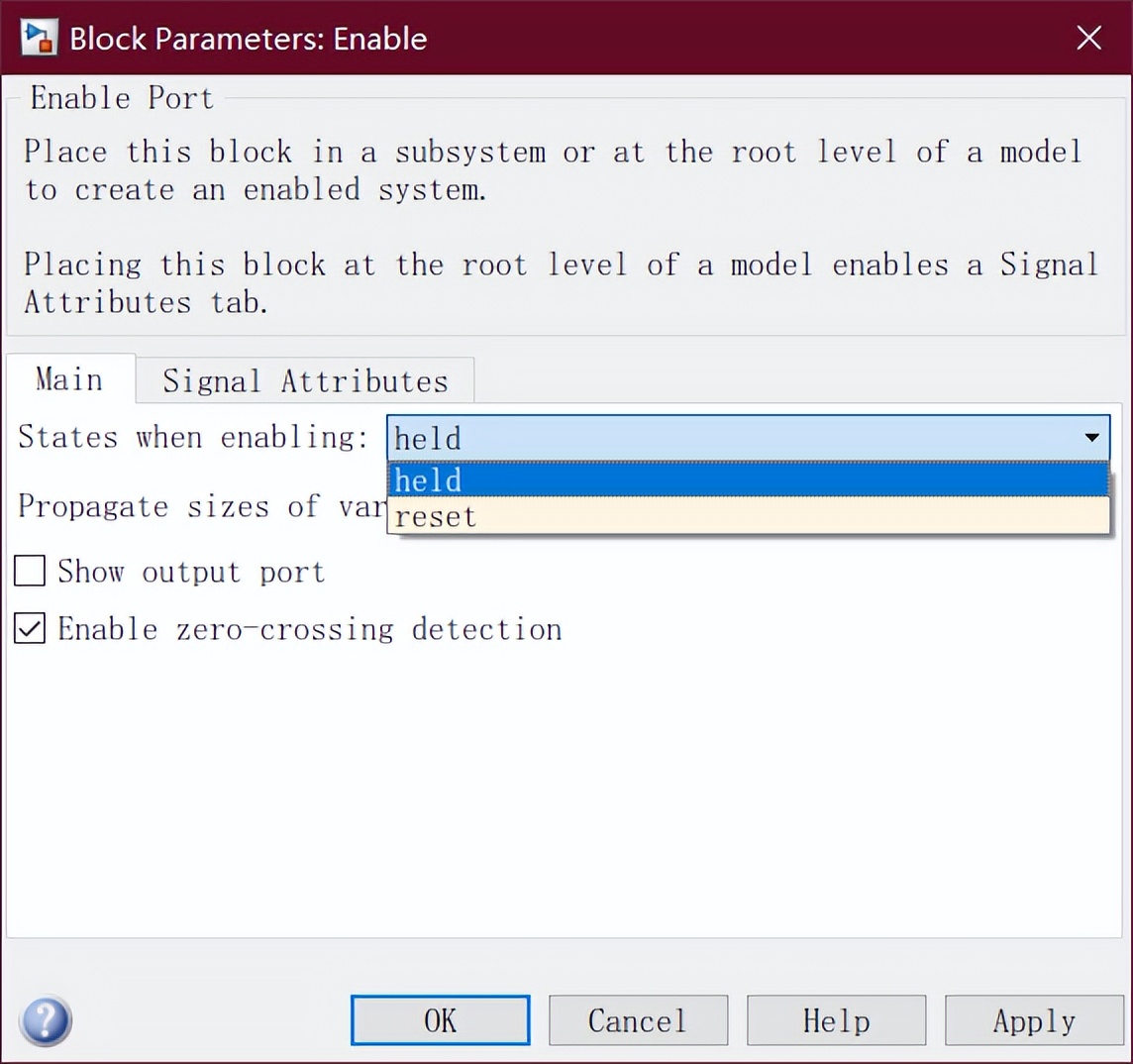
在模型满足某个条件(条件为真)时使能此子系统,不满足时,子系统内部不进行更新或计算,此时输出可以选择held或reset,分别保持最后一次更新时的输出值或输出初始值。比如通常可以使用Enabled Subsystem实现一个当仿真时间到达某一时刻时才开启仿真的功能。
带有使能的子系统模块
实例2
使能子系统
Enable模块参数
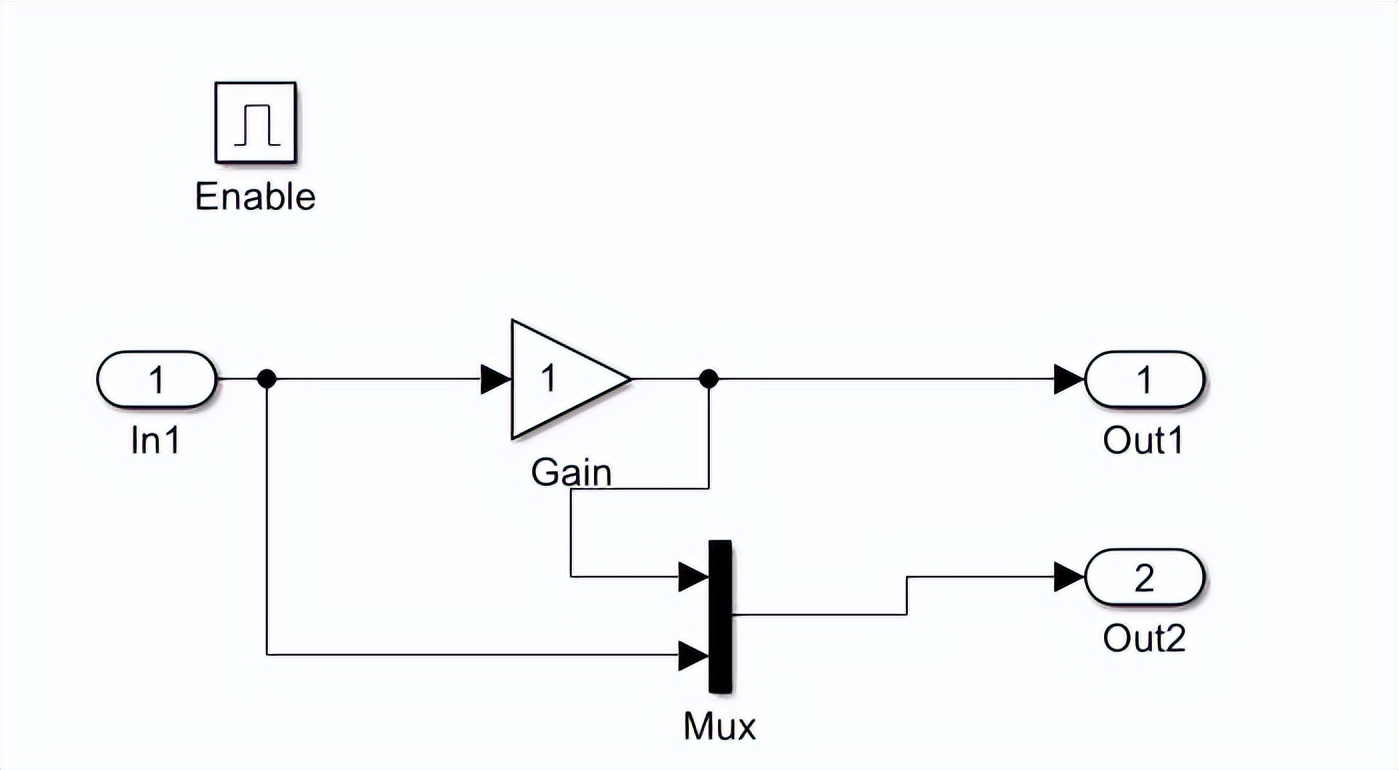
系统模型
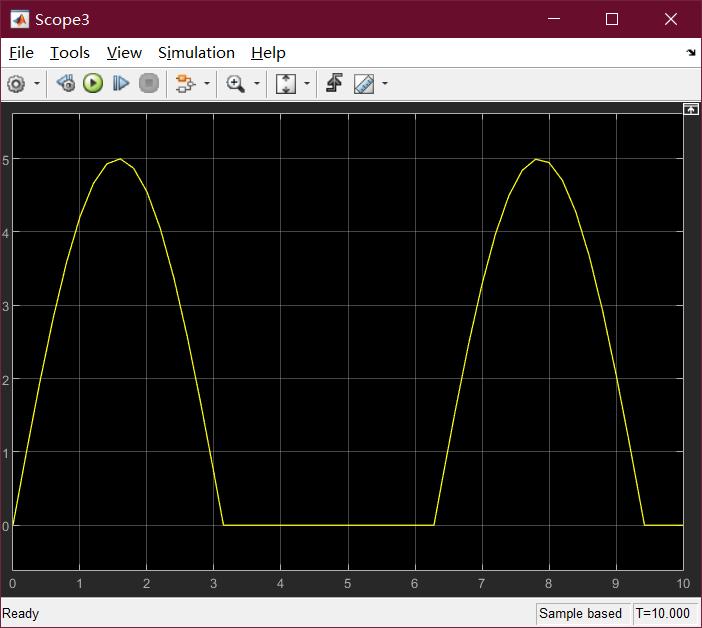
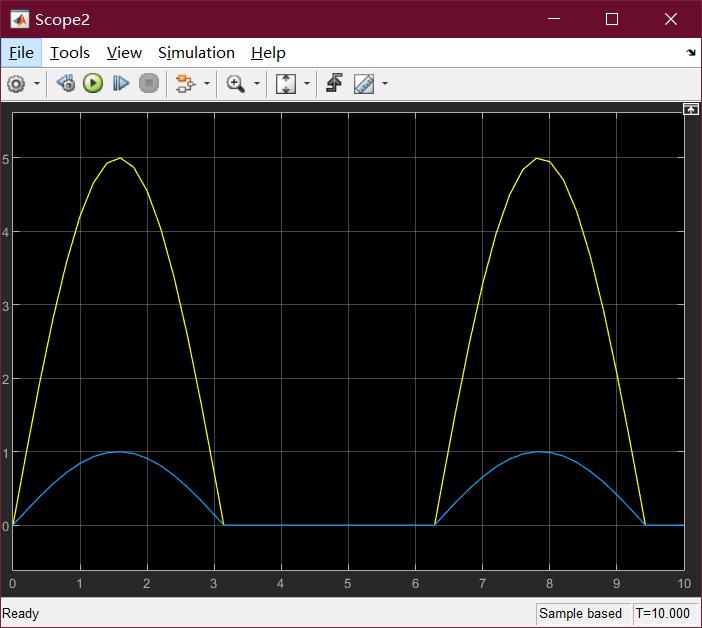
示波器输出
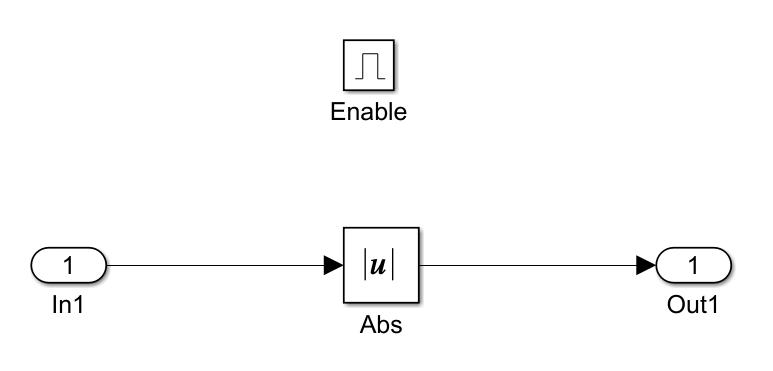
实例3
绝对值子系统
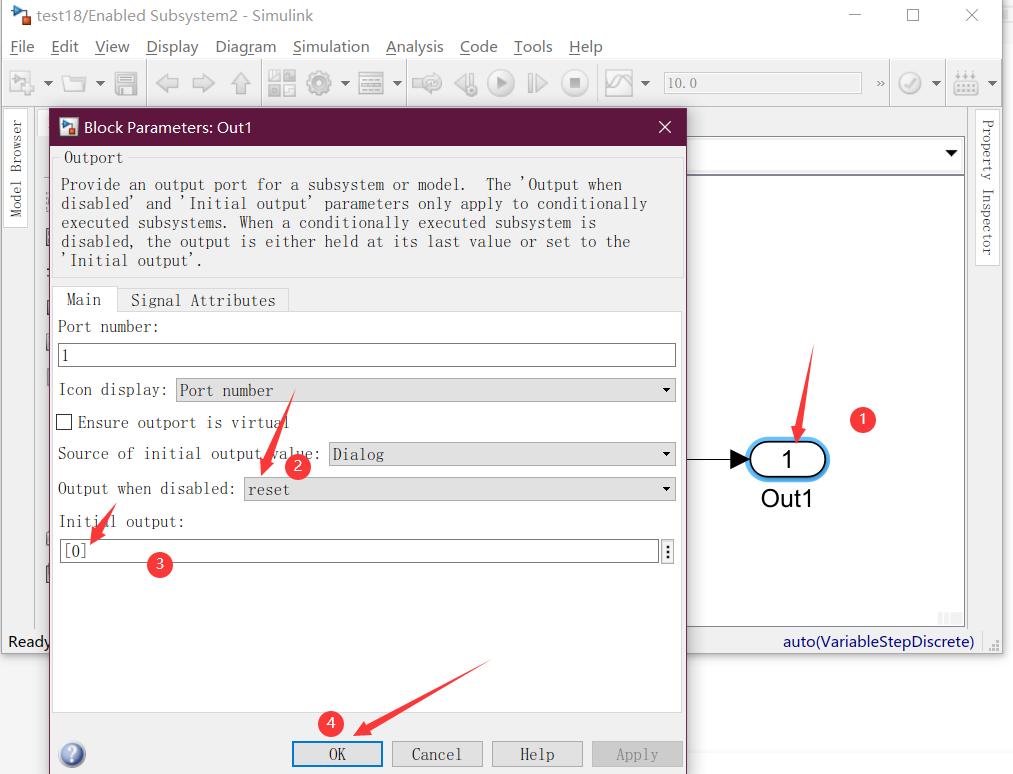
绝对值子系统输出端属性设置对话框
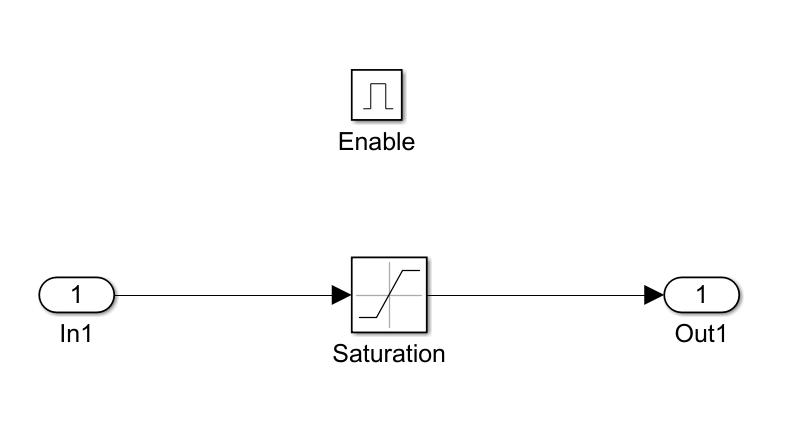
限幅子系统
限幅子系统输出端属性设置对话框
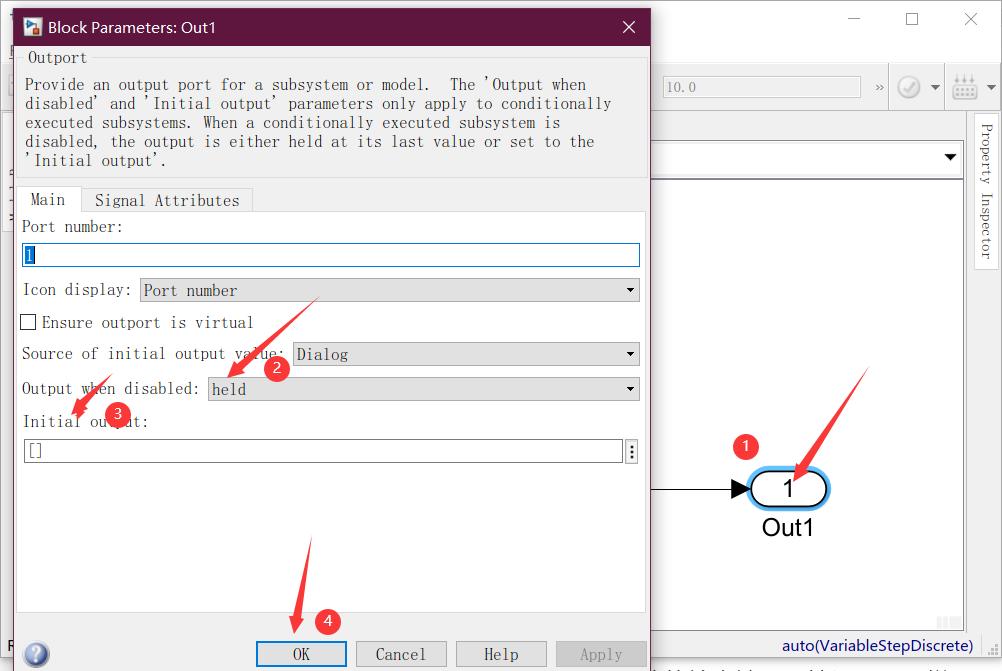
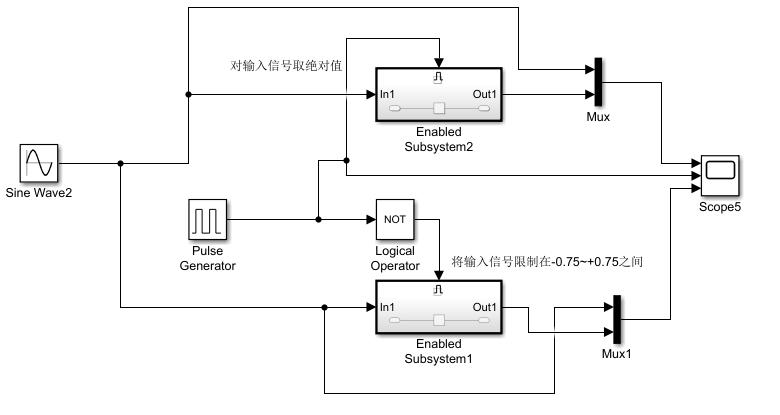
该模型文件包含两个使能子系统,这两个使能子系统的作用不相同,一个是将输入信号取绝对值,而另一个是将输入信号限制在-0.75~+0.75之间。由于两个子系统的输出端口属性设置不一样,因此绝对值子系统模型的输出信号会在使能输入信号无效时归零,而饱和子系统模块的输出信号会在使能输入信号无效时保持其输出值。两种子系统的输出端口属性对话框如图。
使能信号:单位脉冲信号,模块参数
示波器输出结果
3.触发子系统
触发子系统是另外一类条件执行子系统。和使能子系统类似,触发子系统也具有一个信号输入端,但其系统的执行依赖于子系统中定义的触发信号类型。触发子系统的触发信号必须为能够发送过零的信号。
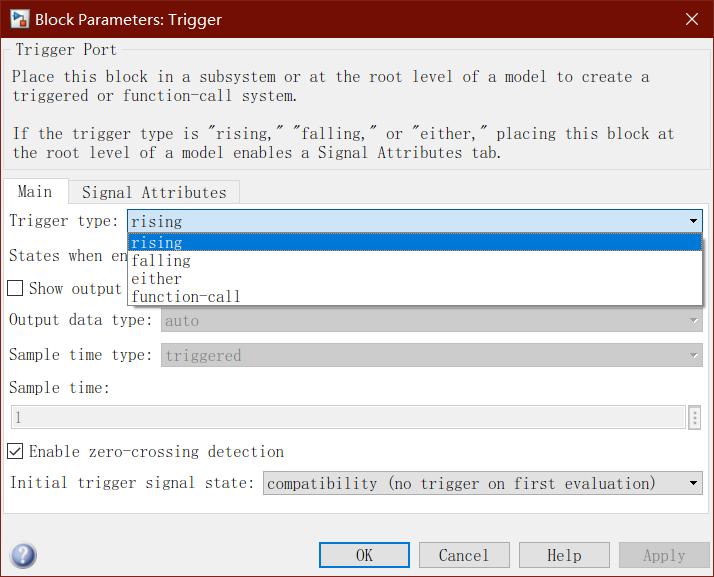
所谓过零,一般是指一个信号从0-到0+的跃迁或者从0+到0-的跃迁。在Simulink中有三种类型的过零信号,分别为上升沿、下降沿和双边沿。在Simulink的所有模型中,能够产生过零信号的模块有Sine Wave、Pulse Generator及Step等。
创建触发子系统的方法和创建使能子系统的方法非常类似。如果需要将一个普通的子系统转变为触发子系统,则可以将Simulink模块库的Port&Subsystem库文件中的Trigger模块放置到子系统中,这时子系统将增加一个触发信号输入端,如图所示。也可以从相应的库中将Trigger Subsystem子系统模块放置到模型文件中,这样也能够创建触发子系统。触发子系统将依赖于触发信号输入的情况执行。一般地,触发子系统仅在触发信号发生过零的时候才执行。一般地,触发子系统仅在触发信号发生过零的时候才能够运行。
模块参数
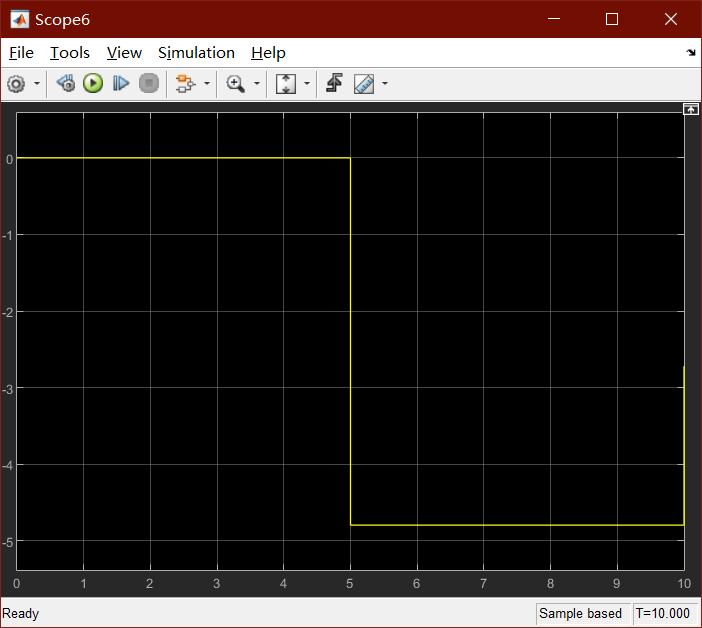
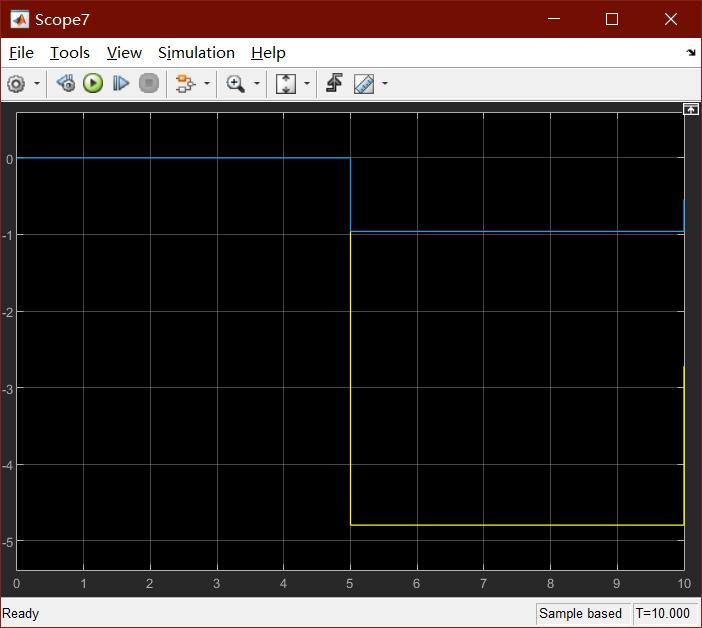
(注:触发子系统的执行仅在触发信号发生过零的时候才有机会执行,并且一次就执行完毕,不占用系统仿真的主时间步长,而且触发子系统的输出都解压被保持。)
实例4
子系统
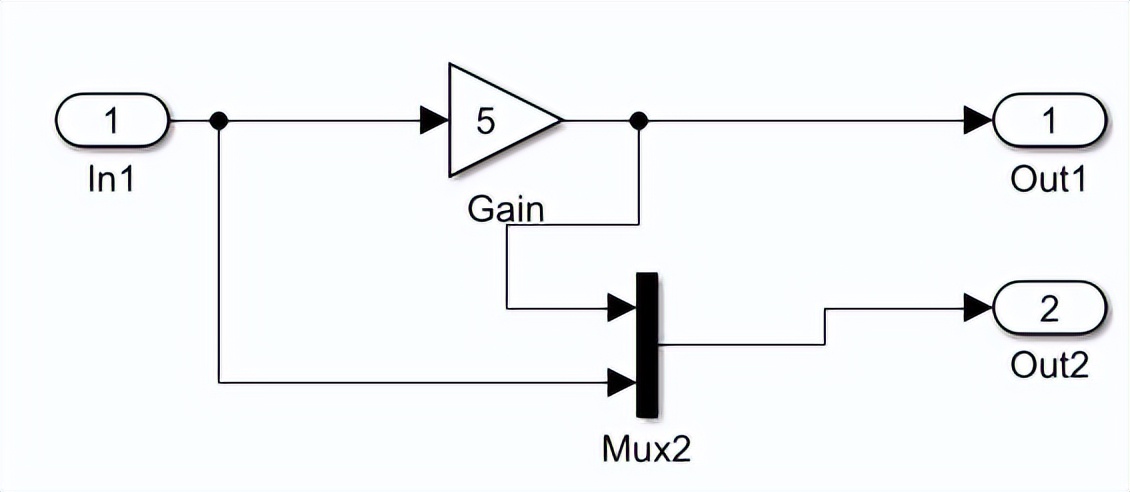
模型
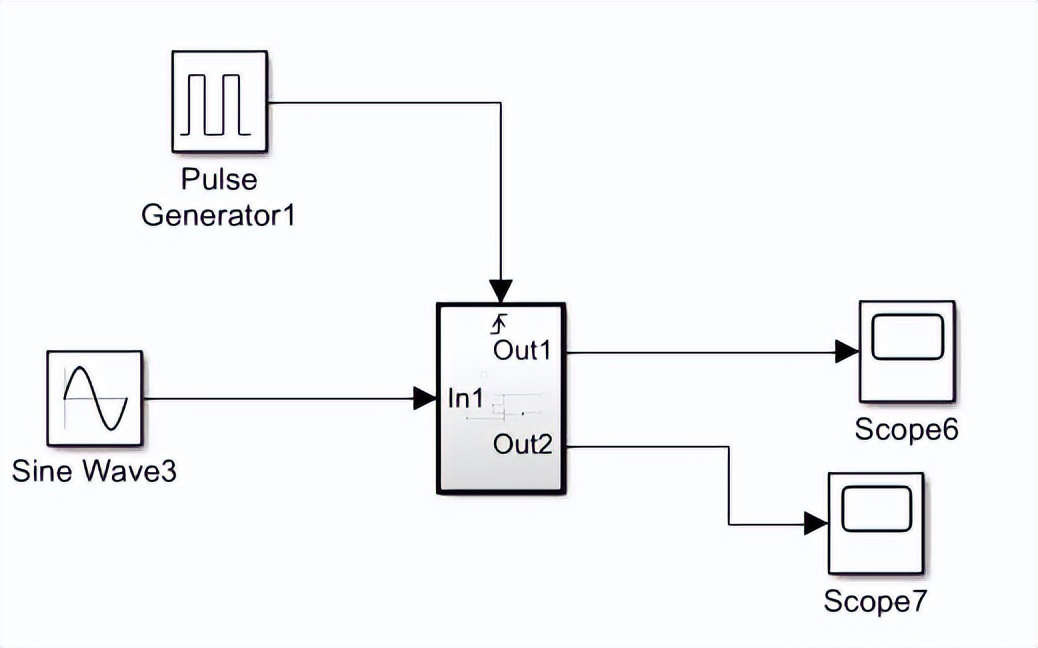
示波器输出
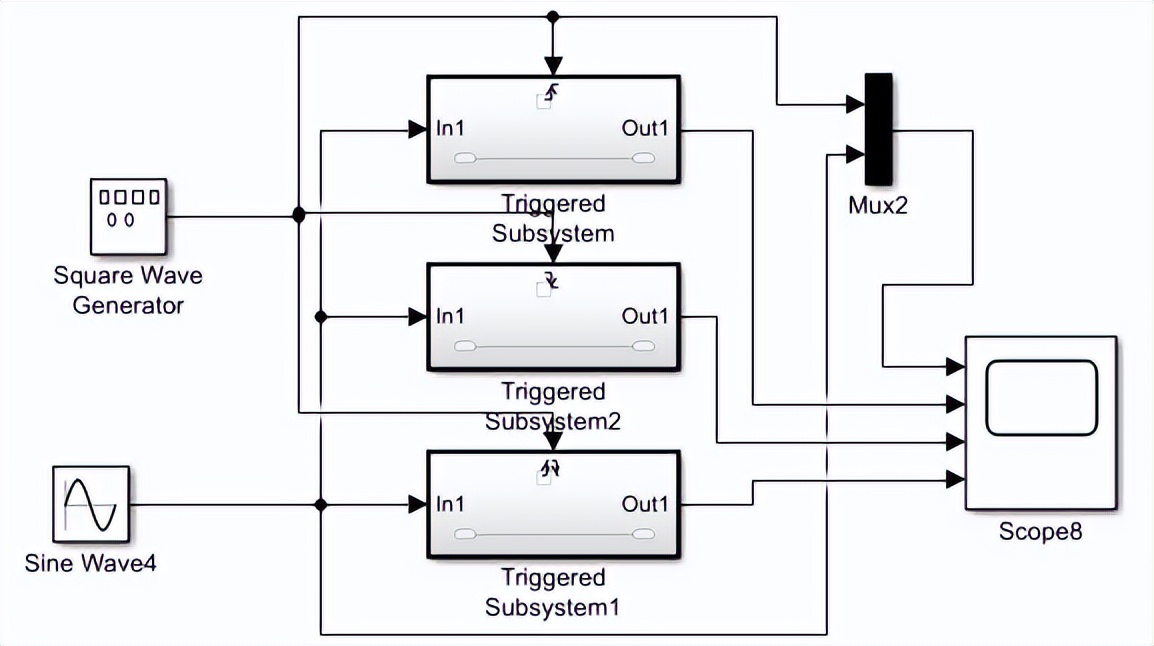
实例5
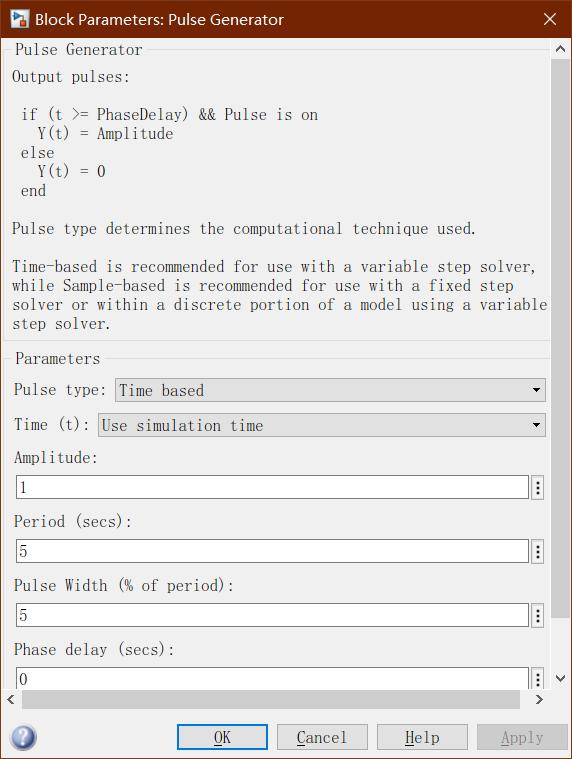
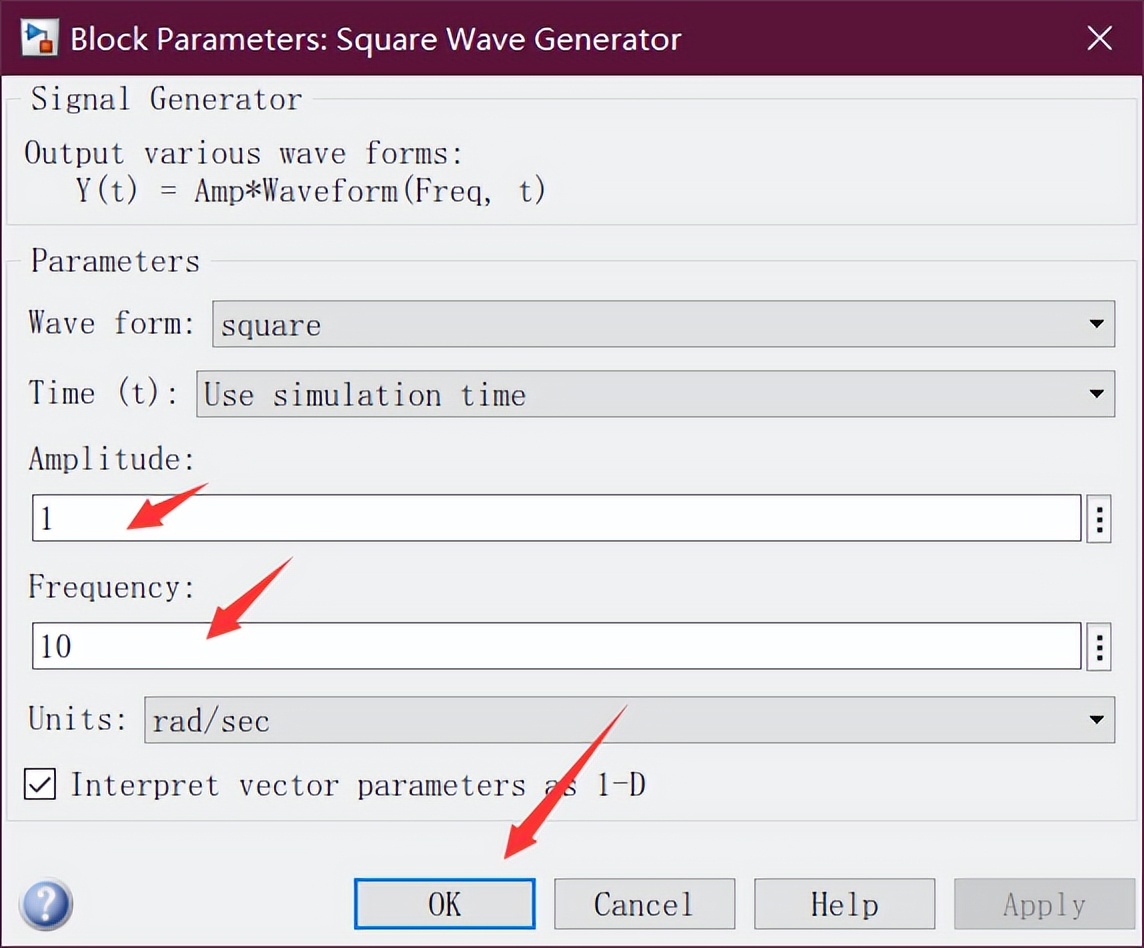
方波信号模块参数
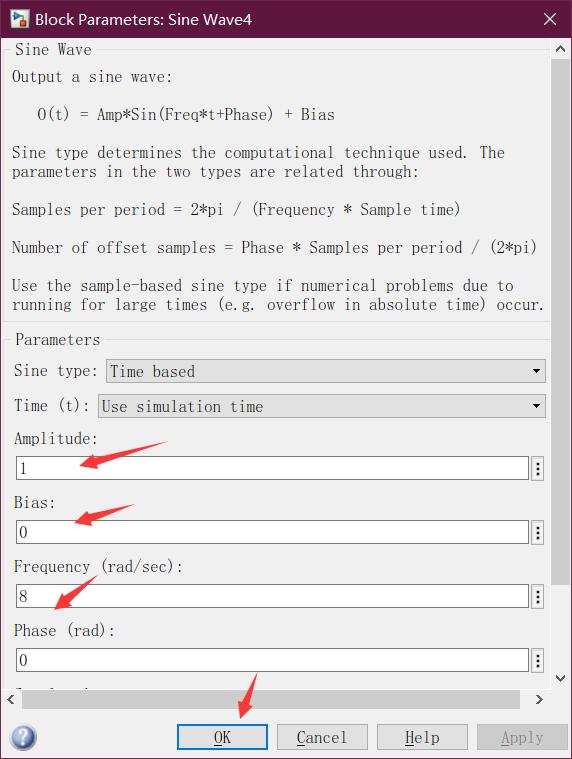
正弦波信号源模块参数
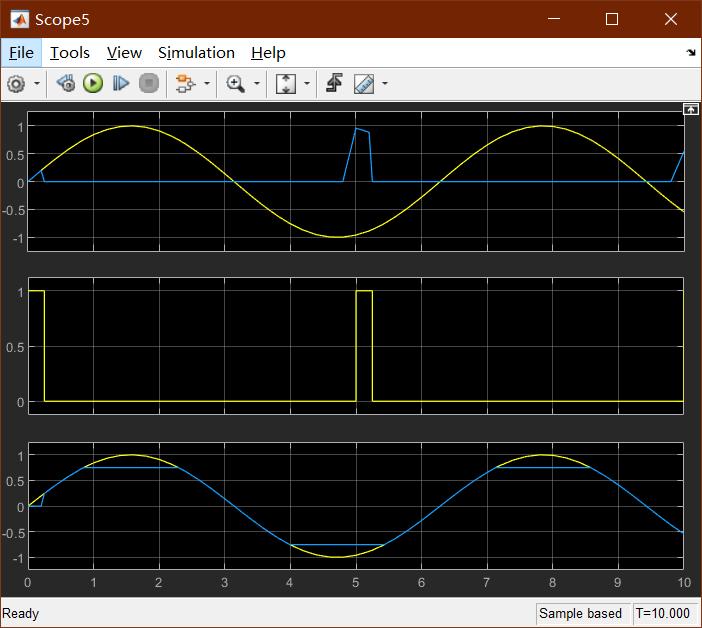
在模型文件中包含了三个触发子系统,分别使用上升沿触发、下降沿触发和双边沿触发。子系统内部是简单的将输入传递给输出,并没有进行任何处理。
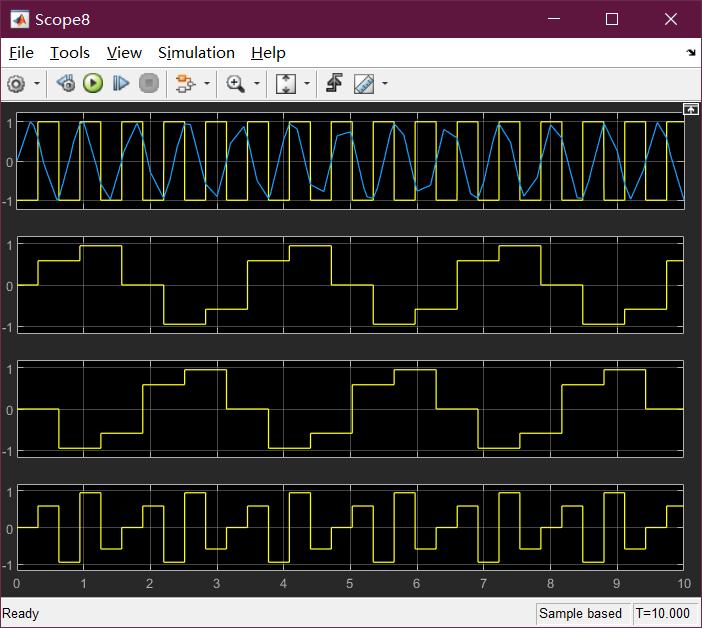
示波器输出
参考内容
[1] 孙忠潇.Simulink仿真及代码生成技术入门到精通[M].北京:北京航空航天大学出版社,2015.
[2] 张威.Stateflow逻辑系统建模[M].西安:西安电子科技大学出版社,2017.
本文内容来源于网络,仅供参考学习,如内容、图片有任何版权问题,请联系处理,24小时内删除。
作 者 | 郭志龙编 辑 | 郭志龙校 对 | 郭志龙