
文 | 夜寻张
编辑 | 夜寻张
前言
近年来,流体力学领域的研究得到了广泛的关注和应用。在这个领域中,流体的速度和流动特性的测量对于理解和预测流体行为至关重要。
PIV(Particle Image Velocimetry)测量技术因其高精度、高分辨率和非侵入性的特点而成为研究者们的首选方法之一。

描述和设置
粒子图像测速法(Particle Image Velocimetry,简称PIV)是一种非侵入式光学技术,可以确定流动速度场。该方法通过连续获取充满小颗粒作为*踪器追**的流动的图像来实现。试验区域通过激光在不同瞬时进行照明。
在每次激光脉冲时,一个垂直于试验区域放置的同步相机记录颗粒的图像。通过比较给定时间内连续图像中颗粒的位置,获得速度场。PIV广泛应用于实验流体力学。
我们实验的目的地是:获取一个非稳态三维流动的速度测量值,3D3C(三个维度和三个分量)PIV技术优于2D PIV方法或立体PIV。

PIV可用于通过三种方法测量体积内的速度场:
第一种方法需要多个摄像机,照亮整个测量体积。通过代数重建算法。
从各个摄像机获取的图像中确定颗粒的位置,利用三维相关处理从重建的体积中获得速度场。该方法的缺点是测量体积的厚度需要较小,使可见颗粒能够正确散射。同时校准多个摄像机比仅使用单个摄像机更复杂。

第二种方法被称为Shake-The-Box LPT 3D。采用拉格朗日轨迹跟踪方法,利用下一个时间步长的颗粒分布预测来捕捉时域。
通过图像匹配技术(在空间中摇动颗粒)纠正预测过程引入的误差,在通过迭代三角测量进入测量区域的颗粒。但由于机翼在运动,更难跟踪颗粒的轨迹,并且还需要机翼的参考位置。

最后一种方法仅使用单个摄像机,用高频率的薄激光片对测试体积进行扫描,算“冻结”颗粒的体积。
需要我们注意的是,通过三维体积图像的互相关计算出3D3C速度场,这些图像是从连续的平面图像重建而来的,可以测量比第一种方法更大的体积(从8到10厘米)。进行采集所需的时间,这不是立即完成,而是持续到扫描达到体积的最后一个平面。
因为雷诺数相对较低和所需测量体积的大小,我们选择了第三种方法。但激光片的扫描频率需要足够高,在测量体积期间我们考虑到“冻结”流动。使用20 kHz的高频摄像机进行大约100个切片的体积图像获取。

这个过程持续5毫秒,在机翼端最大位移为0.117毫米(约0.5个像素),旋转角度为0.03°,可以考虑到冻结流动。
图1展示了这种技术的表示形式。PIV测量需要连续的体积图像,并且采集频率必须足够低,才能保证颗粒在两个连续体积之间的位移。

颗粒在两个连续体积之间的位移不应超过一个四分之一的插值窗口。
每50毫秒拍摄一次体积图像,则机翼端的位移为1.17毫米或4.8个像素,接近24x24像素插值窗口的四分之一。
以20赫兹的频率连续测量七个体积。在这里需要我们注意的是:测量是在移动的机翼周围的静态光学系统下进行的,因此在获取体积图像期间(我们的情况下为第四个体积图像),机翼需垂直于激光片,以避免接近机翼的流体中隐藏区域。
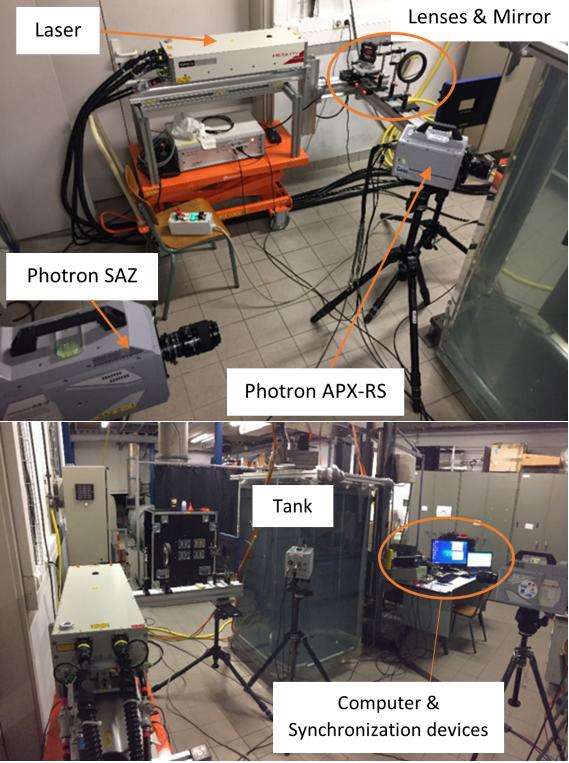
图1
图1注释:测量设备的一般观点。
为了实验顺利进行,我们需要对所有相关方面进行精确的设置。良好的颗粒注入是指颗粒可以跟随流动扰动而不影响其特性。实验槽内填充了平均直径为50微米、密度为1.016x10^6 g/m^3的空心玻璃微球颗粒。颗粒浓度被固定为每个2.4x10^-7 m^3的交叉区域约有10个颗粒。

根据实验槽的体积,颗粒的数量为Np = 1.5x10 / 2.4x10^-7 = 62.5x10^6个颗粒,颗粒浓度C约为41.67x10^6个颗粒/m^3。
通过计算颗粒的质量mp = ρpπd^3/6 ≈ 9.35x10^-8 g,可以确定所需颗粒的质量约为6克。
沉降效应和颗粒直径的非均匀性,需要增加这个值,我们最终将引入实验槽中的颗粒质量为10克。这些数值可确保PIV实验中的良好颗粒注入。

我们为了进行PIV测量所需的照明,采用Laser Mesa PIV 532-120M产生激光束。通过精确排列的多个透镜,将激光束转换成发光片。扫描测试体积是由一个与其他测量设备同步的振动镜进行的。
实验中使用的高速摄像机是一台帧率为1024x1024像素的Photron SAZ摄像机。第二台摄像机用于精确定位机翼在测试体积中的位置,它是一台每帧512x256像素的Photron APX-RS摄像机。下图展示了所有测量设备的同步情况。
速度控制驱动器在每个摆动周期的运动开始时发送触发信号,确定机翼达到垂直于摄像机的位置所需的延迟时间。摄像机以20 kHz的频率开始记录,激光片由振动镜以相同的频率照亮体积切片。

图2
图2注释:用于获得PIV技术的发光片的一系列透镜。

图3
图3注释:测量设备的同步化方案。
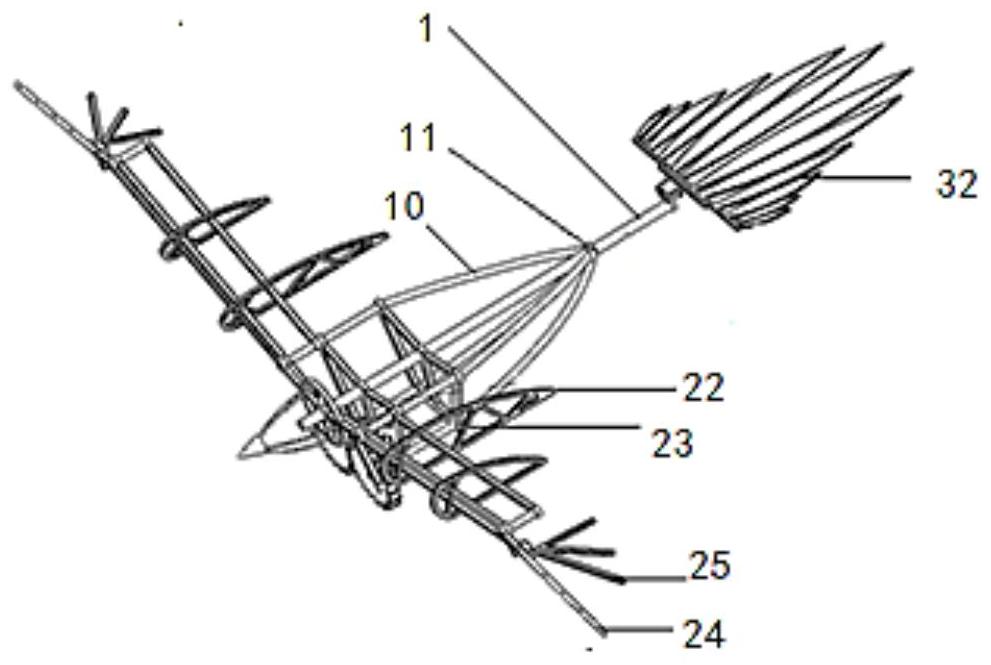
上述过程允许在腾挪周期的特定时刻测量流场,我们为了获得整个腾挪过程的流动动力学,使用黄色示出的环将整个装配体旋转。对于机翼在一个腾挪周期内的17个位置(ψ = ±58.5°,±55°,±50°,±45°,±40°,±30°,±20°,±10°,0°),执行相同的技术。
展示了ψ = 0°和ψ = +30°时的组件示例。对于每个腾挪周期,获取了17个包含七个体积图像的数据集。进行连续32个腾挪周期的腾挪运动,记录机翼的冲击性启动和多个完整腾挪周期,以计算已建立的流动条件下的平均相位。

图4
图4注释:在ψ=0◦(左)和ψ=+30◦(右)的PIV采集期间,允许机翼旋转和倾斜的装配。
由于体积不够深,无法捕捉所有翼展的气流,需要多个体积来获得机翼周围的流场。机翼靠近翼根的部分对所产生的努力或机翼的关键特征没有太大的影响。
我们测试了两个体积,一个从R = 150 mm到R = 230 mm,另一个大约从R = 220 mm到R = 300 mm,如下图所示:

图5
图5注释:1(蓝色)和2(红色)的位置说明。
在先前探讨中,承载机翼和旋转轴的黑色板存在问题。当装配件在测量第一个体积(R = 150 - 230 mm)时在腾挪开始时(角度从ψ = -60°到ψ = -45°),黑色板会遮挡来自激光片的光线,阻碍了对测试体积的扫描。
改进了黑色板的设计,以便在所有旋转位置下测量第一个体积。最后一次实验中使用的黑色板的设计和最终形态如图所示。

PIV测量技术在流体力学研究中具有广泛的应用前景。通过对流体速度场的精确测量,研究者们可以更好地理解和预测流体行为,从而推动流体力学领域的发展。
随着技术的不断进步和改进,我们相信PIV测量技术将在未来的研究中发挥更加重要的作用。
科学家们提供更多的机会来探索和解析复杂的流体现象。我们鼓励更多的研究者们深入研究PIV测量技术,并将其应用于各种不同领域的流体力学研究中,以推动科学的进步和技术的创新。

图6
图6注释:(左)设计新的黑板,以避免在中风开始时发生堵塞。(右)实验中使用的最终黑色板。
校准及相关性
正如先前所说,平面图像被调整大小以在绝对坐标系中重建体积图像。这个过程需要进行校准。我们在测试体积中放置了一个垂直于机翼横向轴的校准图案。
在深度方向上,每隔10毫米拍摄一张图案的图像,总共得到9张图像。将这些图像作为输入用于校准程序,该程序会检测图案并推导出测量坐标系和参考坐标系之间的转换矩阵。下图显示了用于校准的图案。

图7
图7注释:图像显示了用于校准程序的模式。
垂直放置的Photron SAZ相机用于记录图案图像,侧向放置的Photron APX-RS相机用于测试体积的精确定位。
图像被重新投影到校准的相机模型中的物理参考坐标系中。这样可以通过双三次样条插值来获得具有相同比例因子的修正体积图像,确保变换质量高。
通过使用自适应网格和两次迭代进行最后尺寸网格的亚像素相关算法,获取流速场。该代码是在Pprime研究所内部开发的,使用了SLIP库。
相关性计算采用基于集合平均互相关的流体轨迹评估(FTEE)方法进行,初始的插值体积为48x48x24像素,第二次迭代时减少到24x24x12像素,并且有50%的重叠。
需要我们注意的是,得到的三维流速场是非各向同性的,在横向方向上具有较低的分辨率。

为了确定速度场,需要获取七个体积图像,其中一个是当机翼垂直于相机时,之前有三个,之后也有三个,每个图像的时间间隔为50毫秒。
除了FTEE方法提供的加速度场之外,我们还可以使用二阶中心格式来计算加速度场,使用前后两个速度场进行计算,如图所示。以这种方式计算加速度场可以得到更少噪声的结果,还可以更好地估计通过动量方程方法的力。

图8
图8注释:用于确定期望速度场(中心)的体积图像的说明,以及用于计算加速度场的先前(底部)和随后的(顶部)速度场。
我们使用3 x 3 x 3的中值滤波器对速度场进行后处理。所有量值和中值之间差异大于均方根值1.2倍的向量(从向量周围3 x 3 x 3的体积获得的中值和均方根值)都用中值代替。评估了用该方法计算速度场的所有可能的不确定性。
与时间离散化相关的不确定度约为0.125 ms,对应的位移小于0.005 mm。采用速度散度研究的方法,评估与相关过程相关的不确定性。用该方法得到的散度的平均值为0.001像素/像素,为0.025像素/像素的最大值的平均值。
总语

我们通过PIV技术对流体力学中的特定流动现象进行了测量和分析,并获得了一系列有价值的结果。
通过实验和数据处理,我们成功地揭示了流场中的速度分布、涡旋结构、湍动强度等关键特征,并对流动机制和行为进行了深入的讨论。

这次实验具有重要意义,它为我们深入理解复杂流体流动提供了有力支持。通过精确测量和详细分析,我们得到了流场的空间分布信息,丰富了我们对流动行为的认识。
我们的实验结果可为相关工程应用提供指导。对流场特性的准确掌握有助于优化设计、改善流体系统的性能,并推动相关技术领域的发展。

PIV技术在某些情况下可能受到测量误差的限制,特别是在流动速度较高或颗粒浓度较低的情况下。进一步提升PIV技术的精确性和灵敏度是未来的研究方向。
我们认为PIV技术在流体力学研究中具有广阔的应用前景。通过不断改进和发展,PIV技术可以成为探索流动机制、优化工程设计、解决实际问题的重要工具。

希望通过此次了解,能激发更多人去探索流体力学。我们相信,通过不断努力和创新,能够进一步深化对复杂流动现象的理解,为实际应用带来更多的价值和贡献,为科学事业再添一份荣光。