大家好! 我是气球哥!
上一章我们讲了DVP15/50MC11T的单轴控制,这章我们来了解一下多轴运动

多轴运动
1、电子齿轮
MC_GearIn电子齿轮咬合
MC_GearIn指令用于控制Slave轴跟随Master轴按设定的齿轮比做齿轮同步运动;
齿轮比为正时,从轴与主轴运动方向一致;齿轮比为负时,从轴与主轴运动方向相反;
在DVP15/50MC11T中,各种类型的轴均可作为电子齿轮的主轴;除外部编码器轴以外的其他类型的轴可作为电子齿轮从轴。

MC_GearIn
MC_GearOut电子齿轮脱离
MC_GearOut指令用于解除已建立的齿轮同步关系;
齿轮脱离后,从轴将以脱离时刻的速度继续运动;

MC_GearOut
MC_CombineAxes
MC_CombineAxes此指令用于控制从轴跟随两个主轴做齿轮同步运动;
两主轴对从轴的作用可以是叠加,也可是相减;
从轴执行MC_Stop指令可解除已建立的联合齿轮关系; 联合齿轮不可通过MC_GearOut指令解除!

MC_CombineAxes

MC_CombineAxes
2、电子凸轮
电子凸轮用于模拟并实现实际物理凸轮的功能,即在不需要实际物理凸轮机构的情形下,控制一个轴(从轴)跟随另外一个轴(主轴)运动,且运动符合需要的凸轮关系;
电子凸轮使用步骤:
第一步:根据实际需求,在DVP15/50MC11T的编程软件CANopenBuilder中规划凸轮关系;
第二步:编写程序,使用MC_CamIn、 MC_CamOut等相关指令;
第三步:将规划的凸轮关系和编写完成的程序*载下**到DVP15/50MC11T中;
第四步:运行*载下**的程序,执行MC_CamIn指令控制从轴跟随主轴做凸轮同步运动;
一个凸轮关系对应于一条凸轮曲线(通过ID区分),每条凸轮曲线由若干个关键点构成;
关键点与关键点之间可以是曲线,也可以是直线,凸轮关系既定义了主从轴的位置关系,同时还定义了速度、加速度之间的关系;

凸轮曲线
根据主从轴对应关系绘制好凸轮曲线和对应的表格后,我们就可以调用它了
使用MC_CamIn指令来调用需要的凸轮曲线运动
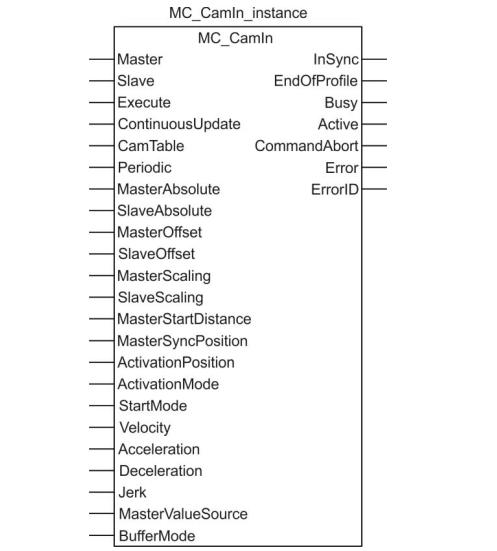
MC_CamIn
参数ActivationPosition为凸轮啮合的起始位置(该位置为主轴的“位置”),即在MC_CamIn指令正确触发执行且主轴到达ActivationPosition时,从轴开始执行啮合动作;
ActivationPosition可以为: 主轴位置、主轴相位、主轴凸轮相位,通过参ActivationMode进行选择;
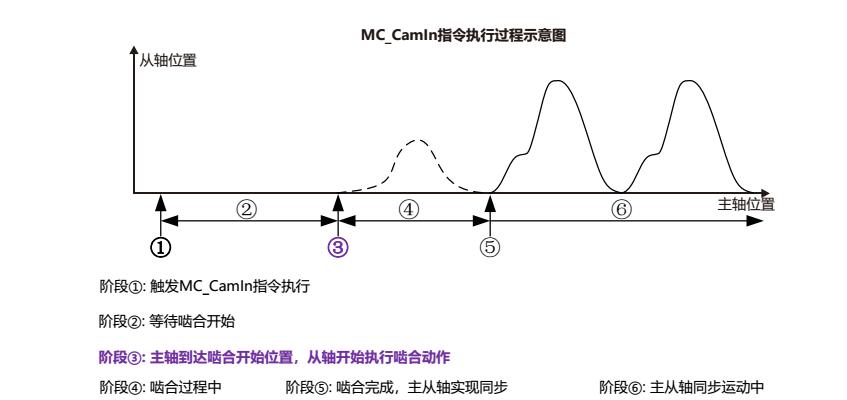
凸轮啮合的起始位置
轴位置模式
参数MasterAbsolute用于指定主轴的轴位置与其凸轮相位之间的对应关系:当参数值为TRUE时,为绝对关系;
当参数值为FALSE时,为相对关系。参数SlaveAbsolute与MasterAbsolute同理。 注意: 对应关系是在啮合动作开始时刻建立,而不是MC_CamIn指令开始执行时刻
比例缩放与偏移
主从轴的位置偏移和比例缩放共同决定实际执行的凸轮关系

比例缩放与偏移

比例缩放与偏移

比例缩放与偏移
MC_CamOut
MC_CamOut指令用于解除已建立的凸轮关系;
MC_CamOut指令执行后,从轴将以凸轮脱离时刻的速度继续运转;
DMC_CamReadPoint

DMC_CamReadPoint
DMC_CamReadPoint指令用于读取控制器中电子凸轮关键点参数;
读取凸轮关键点参数:主轴位置、从轴位置、从轴速度、从轴加速度;
CamTableID表示凸轮表ID;
CamChangedPoint为FALSE时,读取到的位置是当前执行的凸轮表凸轮关键点的参数信息;
CamChangedPoint为TRUE时,读取到的位置是更改后尚未执行的凸轮表凸轮关键点的参信息;
CamPointNum表示读取的凸轮点,例如: CamPointNum=2,读取的是凸轮表中第二个凸轮关键点;
挺杆功能
凸轮曲线中可添加凸轮挺杆点,当凸轮运动经过该位置时,根据设定的动作方式输出一BOOL型的状态,可通过指令DMC_CamReadTappetStatus获取;
每个凸轮挺杆点包含四个要素:主轴位置、从轴位置、正向经过时的动作、反向经过时的动作;
挺杆的动作有四种选择:关闭(不做处理)、置位(设置为TRUE)、复位(设置为FALSE )、取反;
每个凸轮周期开始时, 所有挺杆点的状态全部复位为FALSE。
飞剪功能其实就是凸*功轮**能的一个特例,因为常用所以把它独立的完善好,方便大家调用,这里我就不在讲述了。
多轴运动就介绍到这里了,下一章我们继续学习插补部分(直线,圆弧,螺旋等)
喜欢这篇文章的可以转发和关注我,如果有好的建议或意见请留言告诉我。
下次见!!
我是气球哥!!
