在打磨行业中,需要使用一个摆焊动作,来进行打磨作业。FANUC机械手中有自带的摆焊参数,ABB中却没有摆焊指令,我们只能通过自己建立程序来实现这个功能。创摆焊一般需要这几个参数分别是 P1 摆焊开始点, XYZ2 摆焊方向, r3摆焊幅度,dstep4摆焊步长,nstep5摆焊步数,speed6摆焊速,tool7摆焊的工具方向,wobj8摆焊的工件方向。下面我们来看下怎么创建摆焊程序。
一、新建一个程序,如下图,点击参数。
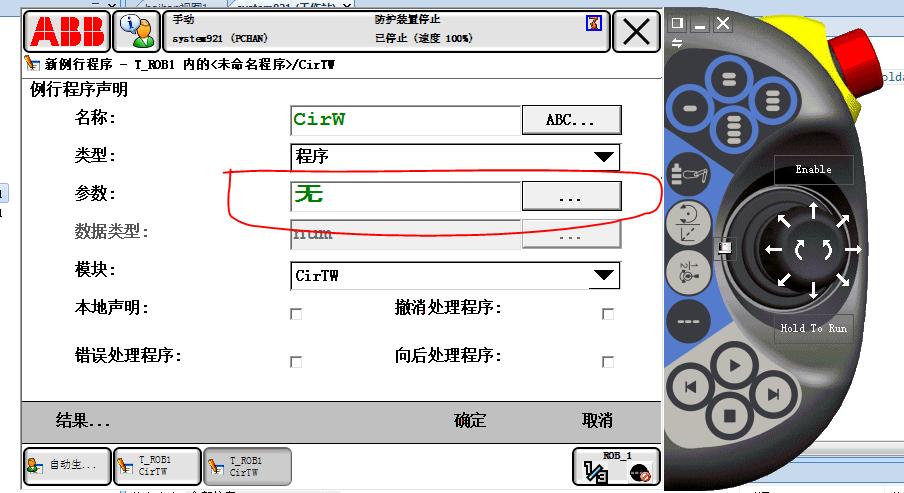
新建程序,点击参数
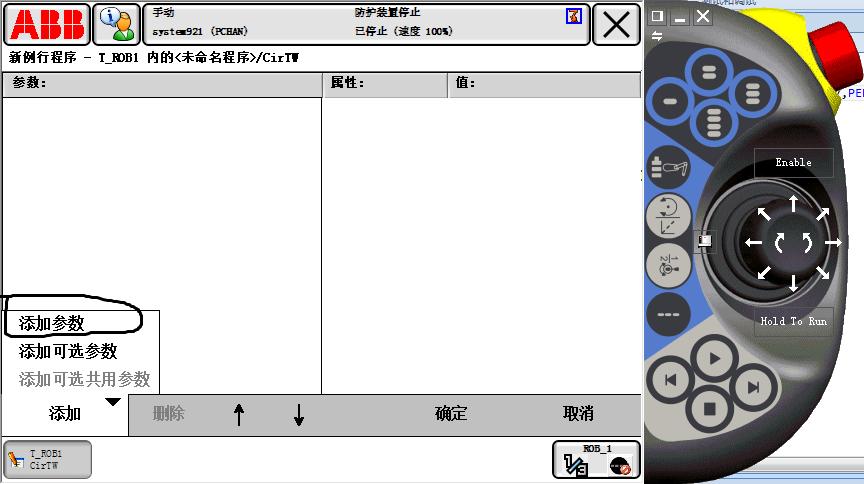
选择添加参数
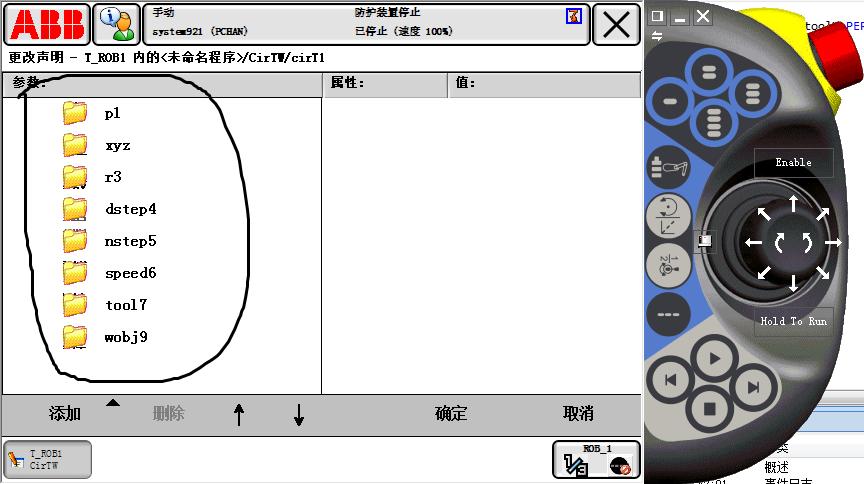
添加 参数 以及参数的数据类型。
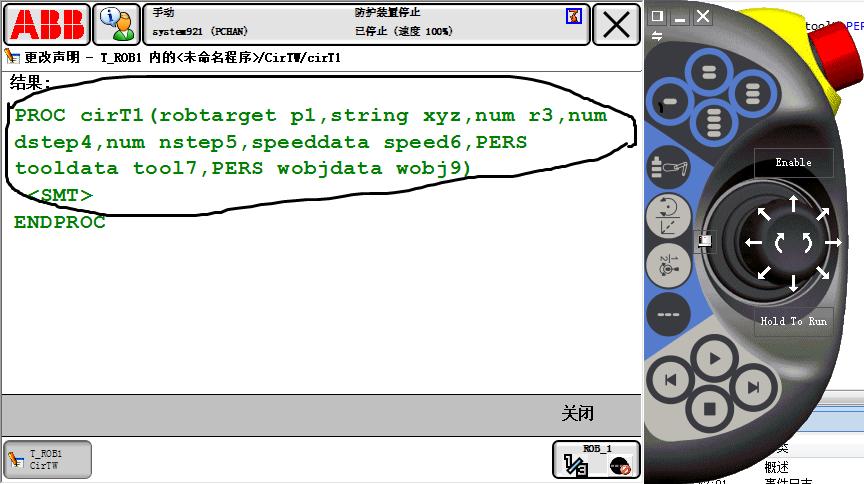
创建摆焊所需的参数及参数的数据类型
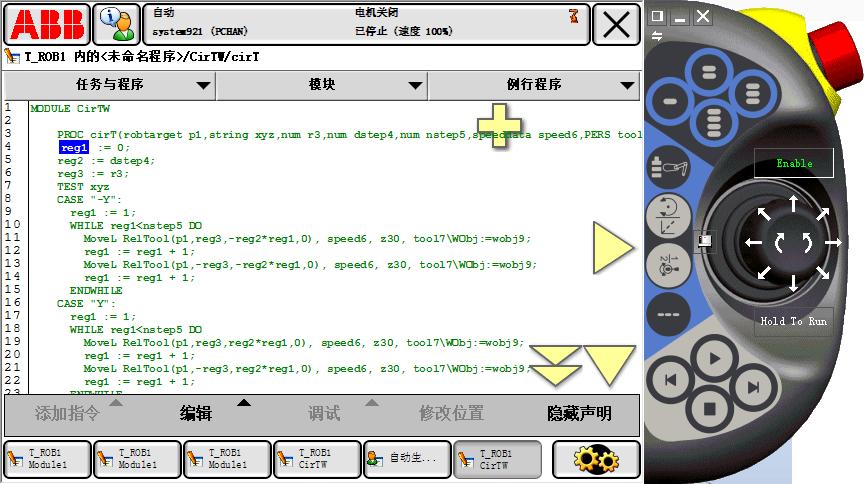
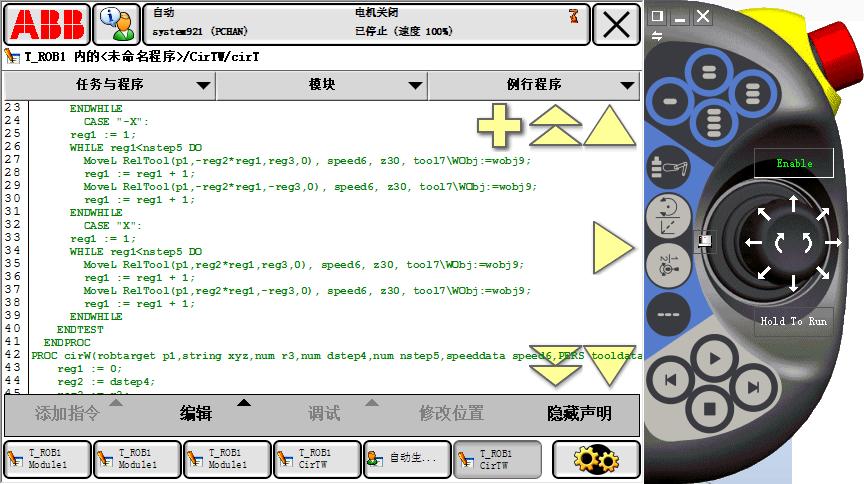
二、这样我们的程序框架已经创建完毕,接下来开始利用这下参数通过移动指令offs和Reltool来实现摆焊运动。我们首先通过XYZ来判断摆焊的方向,在通过摆焊步数nstep来判断摆焊是否满足结束条件。详细如下图。
三、摆焊程序已经完成,我们开始在程序中调用摆焊程序进行运动。给摆焊指令输入合适的参数《摆焊开始点,摆焊方向,摆幅,步长,步数,摆焊速度,摆焊工具,摆焊工件》。

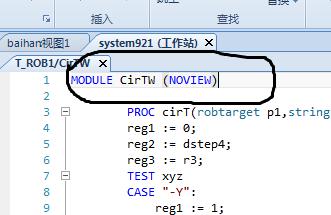
四、当完成后,为了方便使用,我们需要把摆焊模块隐藏起来。需使用robotstudio 在摆焊模块后面添加一个指令noview.如下图。