智能运控小讲堂:伺服电机是如何工作的?
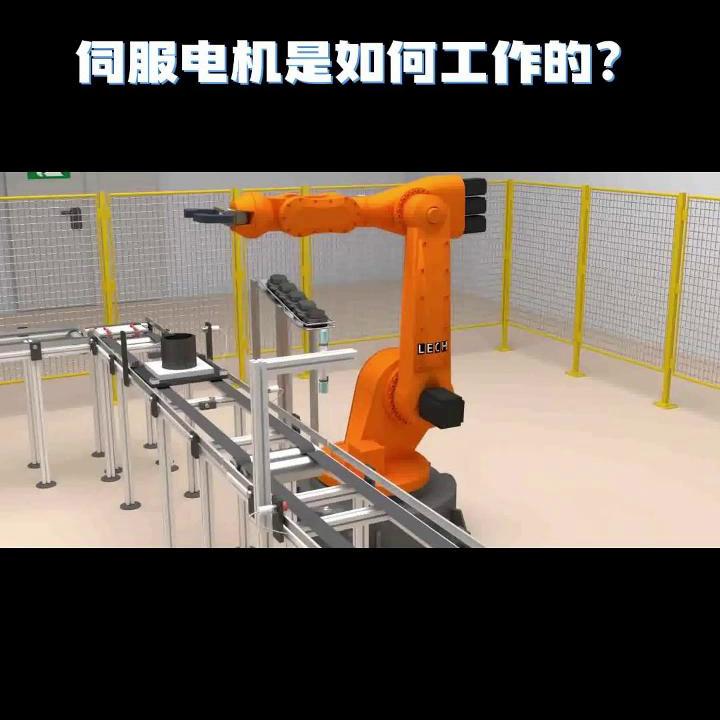
这款工业机器人需要一个要求特别高的驱动器。机器人不仅要有能够快速地加速和减速,还需要精确定位。事实上,这里安装的是一个三相伺服电机。在这个视频中将为大家介绍"伺服电机是如何工作的"。
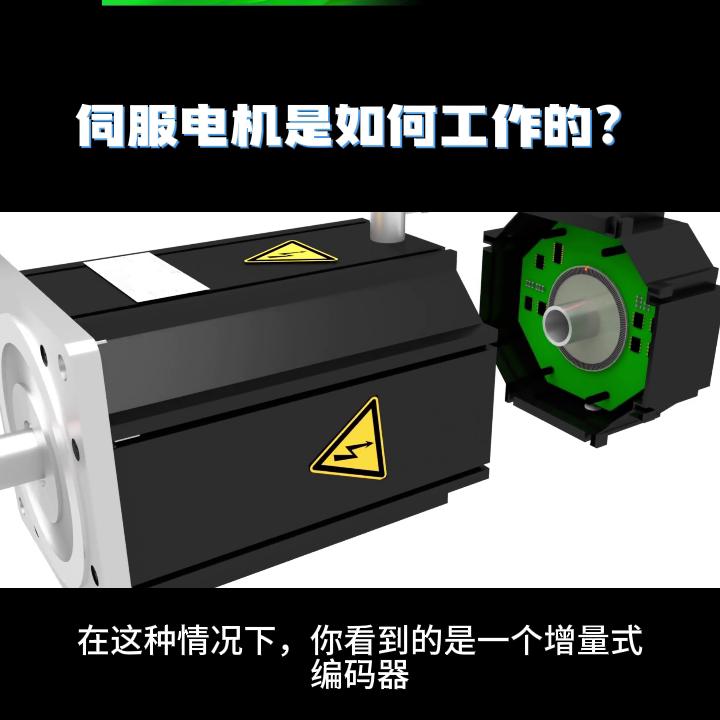
伺服电机是伺服驱动器的一部分,无论是无刷直流电动机,同步或强劲的同步电机。但有一点是相同的是传感器对转子位置的检测,可以是一个分解器或一个编码器。在这种情况下,你看到的是一个增量式编码器,传感器设备向控制器提供反馈以保持。例如:转速或扭矩常数,或尽可能快地到达目标位置。
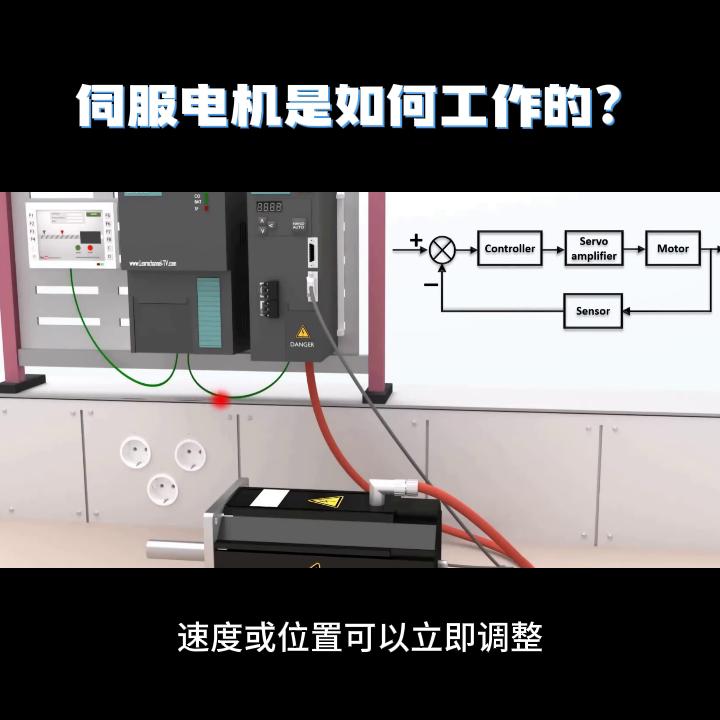
伺服马达系统包括伺服马达与其反馈装置,一个伺服放大器和一个控制器。但这些设备是如何一起工作的?
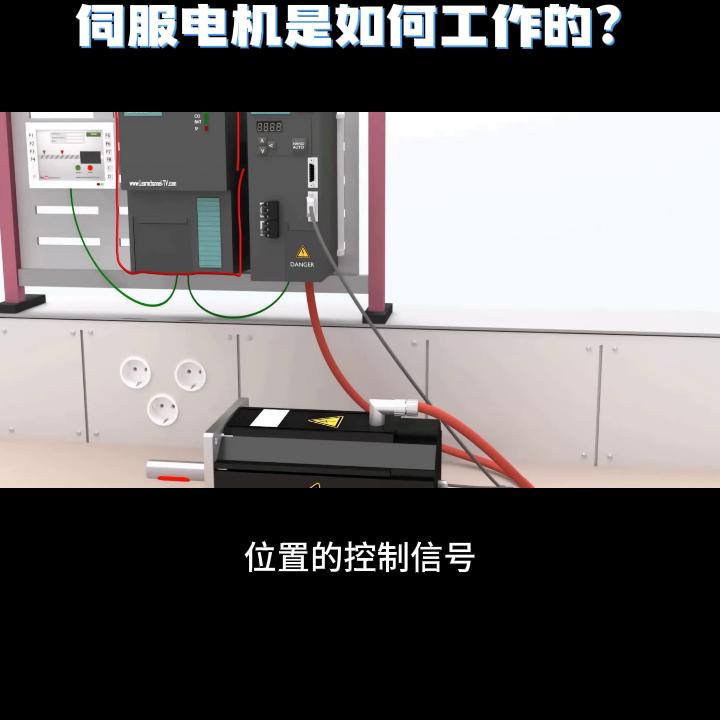
·伺服控制器发送低电压位置的控制信号、速度或扭矩到伺服放大器。现在这些命令被放大到高功率,其中电机可以使用传感器的电脉冲被送回到放大器上。放大器使用这个信息来控制速度和转子位置。
·伺服电机控制器的工作也被称为运动控制器,是为了关闭系统的循环,通过不断地互换数据与伺服放大器。电机参数,如扭矩、速度或位置可以立即调整。一些制造商提供模块,其中结合了控制器和放大器,所以你会有更少的部件,更少的连接和更小的占地面积。
以交流伺服电机为例,通常是指三相同步电机,其转子场由永久磁铁激发,所以会得到一个非常强大的小尺寸的无刷电机,定子绕组产生一个旋转的磁场。其转动的速度和力量是由放大器和控制器控制,以便快速定位。所有这些电机必须具有较低的惯性力矩,这可以通过拉长的形状来实现。