气动控制流程介绍
机电一体化(Mechatronics)将机械技术与电子技术结合,发挥各自的长处,从而弥补各项技术的不足。机电一体化利用监测组件和传感器来监测执行组件的运动,将监测信息输入计算机,比对预期的运动,计算控制信号,透过控制组件来执行控制。

气动组件简介
-
空气压缩机
-
主路过滤器/干燥器/油雾器
-
空气过滤组合
-
控制阀
-
执行组件(气缸/真空组件)
-
管接头
气源是气动组件和系统正常工作所需提供的压缩空气的动力源,是气压传动与控制系统的核心组件。
气源包括气流输送机械(如空气压缩机和真空泵等)及气源处理系统。
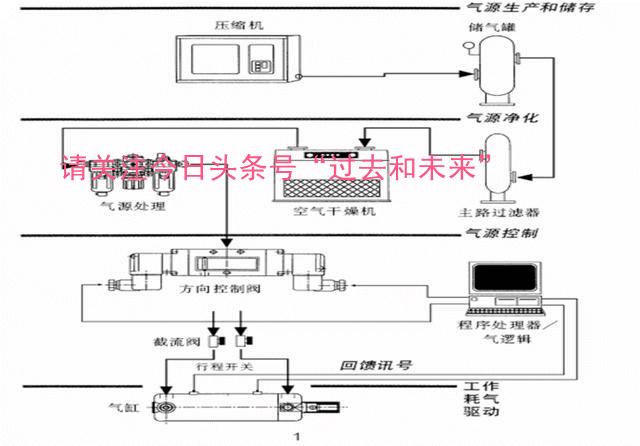
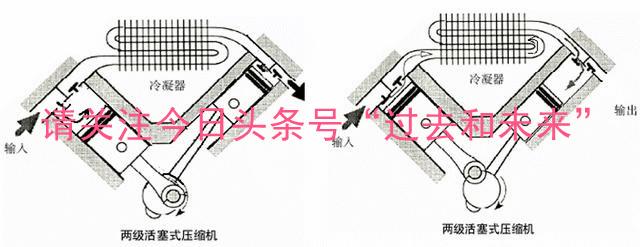
1. 空气压缩机
压缩机是将大气增压成较高压力的空气,输送给气动组件使用。
2. 主路过滤器/干燥剂/油雾器
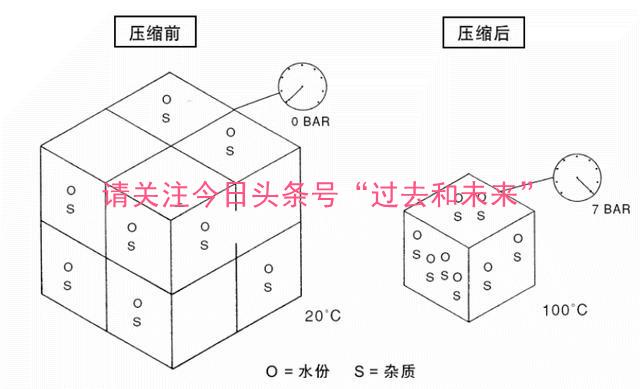
自然界中的空气是一种混合物,主要是由氧气,氮气,水蒸气,其他微量气体和一些杂质(如尘埃,其他固体粒子等)等组成。
气动设备不能在压力波动或充满杂质,油浮物和水分的压缩空气上正常工作,所以空气设备是气动系统不可缺少的部件。

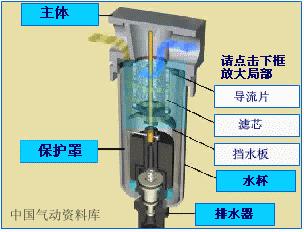
2.1主路过滤器
在储气罐后应装一个大容量的主管道过滤器,除去从压缩机中带来的油雾和空气中的水分等杂质。
过滤器必须保证最小的压降,并能除去压缩机中带来的油雾,以避免冷凝物在管道中的乳化作用。而装在内部的自动排水器或接外部的自动排水器能确保排出积水。这种过滤器的滤芯一般是快速更换筒型滤芯。

2.2主路干燥器
主过滤器一般只能除去压缩空气的液态水,而气态水份需透过空气干燥机加以处理,以降低压缩空气的漏点。其中有三种主要型式的空气干燥器:吸收式,吸附式,冷冻式。

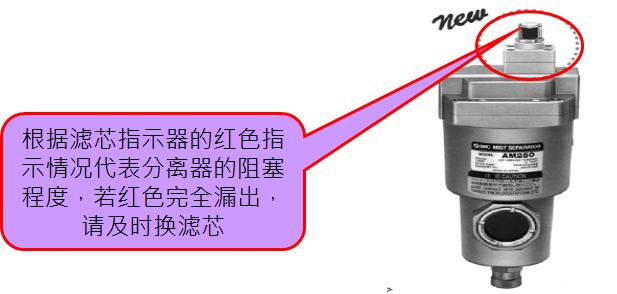
2.3主路油雾分离器
油雾器能把主路过滤器不能去除的微小的尘埃和油雾分离。油雾分离器可把压缩空气内小至0.3μm的粒子分离99.9%以上。微雾分离器更能把小至0.1μm的粒子分离。
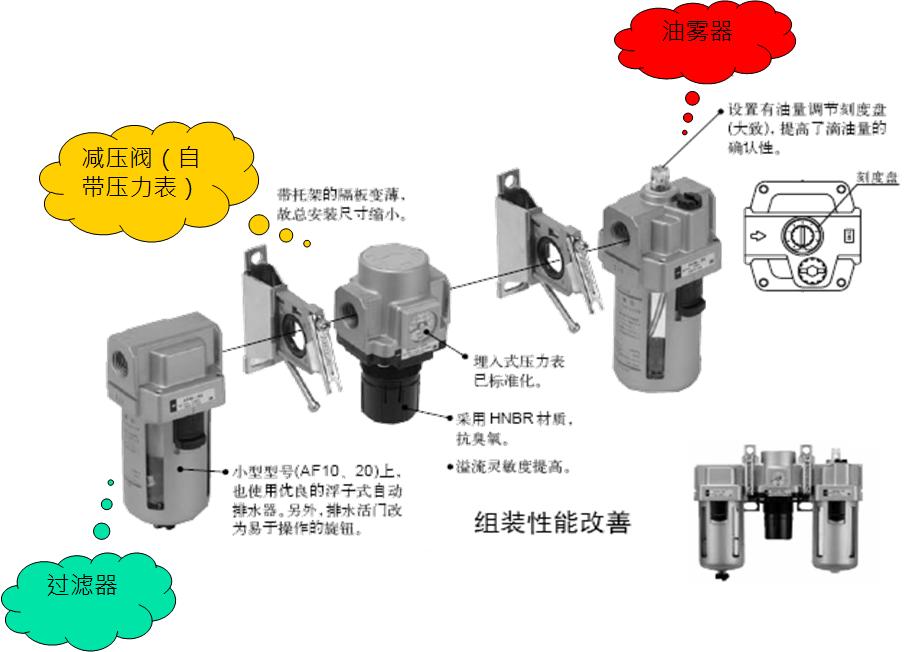
3. 空气过滤组合
空气过滤组合(FRL),即空气过滤器(Filter),减压阀(Regulator)和油雾器(Lubricator)。一般在每个独立的回路系统,都是基本装置。此装置上的过滤器有别于主管路上的过滤器,无论在结构上或是过滤效能上,都不能取代主管的过滤器。这组合上的空气过滤器可谓是一个后备气动系统的保障。

3.1过滤器
过滤器可除去压缩空气中所含的污染物及凝结水。在清洗过滤器的滤网时,可采用煤油浸泡法,经过一段时间后,再用气枪逆向吹凈。

3.2调压器
调压器可以保持操作压力稳定,降低压力。在安装调压器时,应该注意气体应该先经过空气过滤器,再进入调压器,以免不洁物质进入调压器。

3.3油雾器
-
减少机构器件(气缸)的磨耗
-
减少磨损
-
防止腐蚀

4. 电磁阀
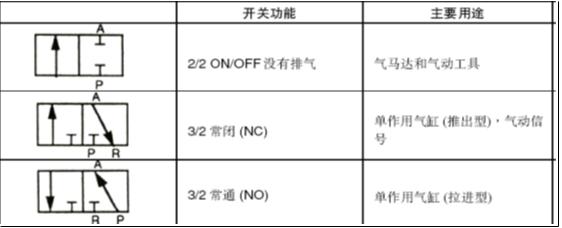
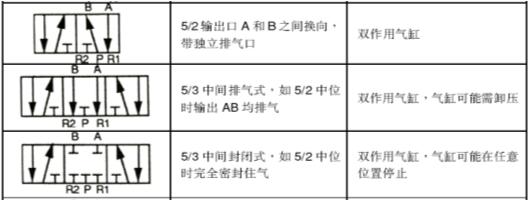
通过改变阀芯内部的位置来改变阀体上气口的链接路径,借此控制气缸的伸缩动作。不同气口数和切换位置的方向控制阀功能有别。

电磁阀工作原理

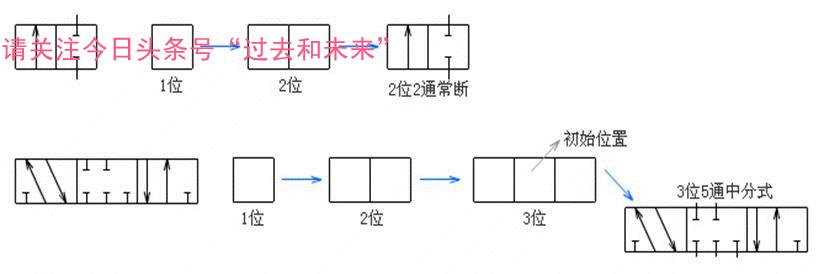
阀瓣(阀)的符号表示方法如下所示:
-
其中的b/a为 “a”位“b”通阀
-
“a” : 阀瓣内的转换位置数目
-
“b” : 阀瓣内的路径数目或受控制接口数目

5. 气缸&真空组件
5.1.气缸
不同的设计气缸是最普遍的能量转换的组件。应用于气动控制回路中,结构可分为两种基本的型式:
a.单作用气缸:一个进气口的单作用,在一个方向上产生动作。

这种执行组件是利用空气压力交替用于活塞的相对面上而产生这两种伸出和回缩的力。由于有效活塞面积较小的缘故,所以推力在回缩行程时较弱。但只在气缸拉相同负载时才考虑。
单作用气缸用于压紧,打印,出料等等。它的空气耗气量低于大小相当的双作用气缸。推出时由于要克服弹簧力所以会降低推力,因而需要较大的缸径,而且为适合弹簧本身的长度,气缸的总长相应加长,从而限制行程的长度。
b.双作用气缸:二个进气口的双作用气缸,产生伸出和回缩运动的行程,不同的气缸(执行组件)可用附录中的图形符号来表示。

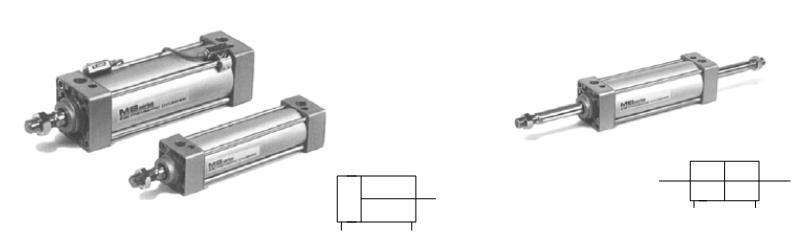

这种执行组件是利用空气压力交替用于活塞的相对面上而产生这两种伸出和回缩的力。由于有效活塞面积较小的缘故,所以在回缩行程时较弱。但只在气缸相同负载时才考虑。

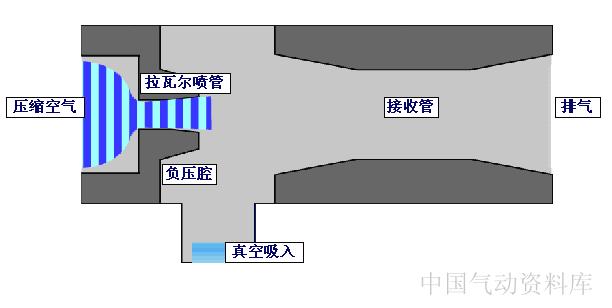
5.2.真空发生器
是根据压缩空气的推进作用而产生真空的装置。其原理如下图所示。一次侧压缩空气经高速喷流,其卷吸作用吸走真空腔内空气,则二次侧压缩空气流入,产生真空吸引力。因高速喷流获致高真空度的缘故,而作为所谓的喷嘴,散射体,根据其形状尺寸差异等来决定可到达真空度,排气量,吸入量,空气消费量。
5.3.吸盘
1.吸盘形状及功能
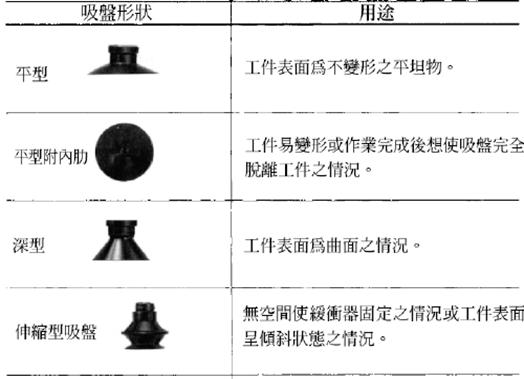
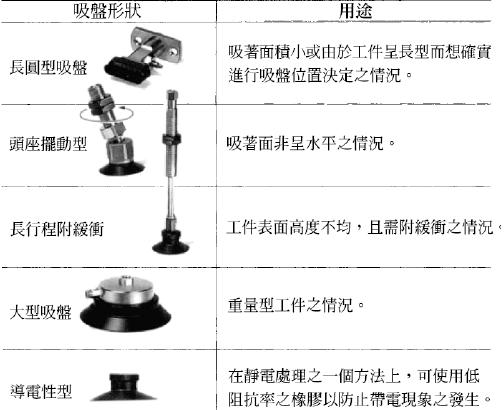
n真空吸盘是真空吸附系统中的执行器,它利用吸盘内表面与被吸物(工件)表面之间形成负压(真空)。在大气压力作用下将吸物提起。真空吸盘用于机械手的抓取机构,适用于抓取薄片装工件。一般要求表面光滑平整,无孔,无油垢。
6. 管接头
