
文 | 天文颂史
编辑 | 天文颂史
«——【·引言·】——»
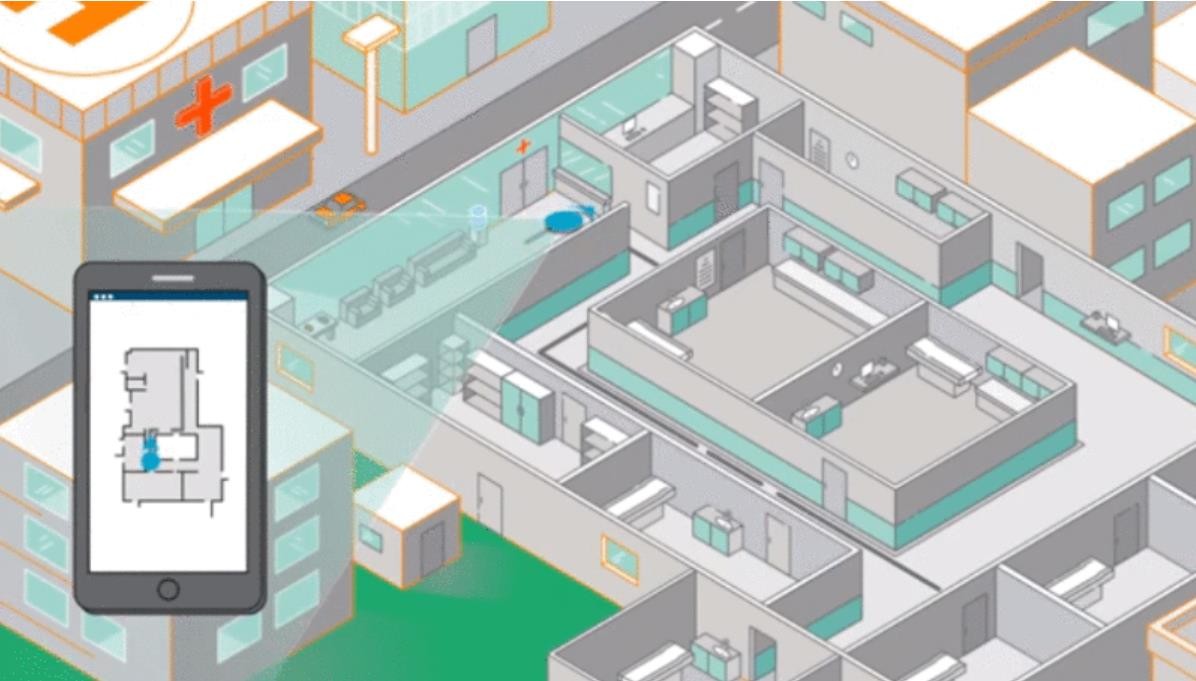
室内定位的应用非常广泛,从建筑物内的用户导航(游客导航或灾难管理)到建筑技术的智能管理(检查和维护)或无人驾驶车辆(例如机器人)的自动定位。
实现基于位置的服务(LBS)的关键因素是用户的足够精确的实时位置。在室外,通常使用全球导航卫星系统(GNSS)在全球参考框架中进行定位。
但在建筑物内部,即使使用特殊接收器(高灵敏度GNSS,HSGNSS),由于卫星信号被建筑物组件(例如墙壁或天花板)反射或衰减,目前仍无法进行持续可靠的位置确定。
为填补这一空白,近年来已经探索了基于各种技术的无数方法,包括红外线、超声波或无线电频率。
大多数情况下,使用基于参考站和移动站之间的无线通信系统的信号来估计位置。这些方法在精度、经济性和复杂性方面受到 限制 ,适用于个别应用和覆盖区域。

类似室外的GNSS这样的通用标准解决方案在建筑物内不存在,其中原因之一在于需要安装和维护额外的基础设施。这可能会导致在大型建筑物中需要大量的时间、成本和人力。
建筑物内的信号受到各种传播效应(多径、衰减等)的影响,导致错误结果。
使用普及的低成本多传感器设备,是一种独立于外部基础设施的替代方法是惯性导航,例如智能手机,可以检测用户的相对移动,以确定人在建筑物中的位置。
因此,智能手机似乎是面向大众的室内定位应用的有前途的平台。

«——【·智能手机传感器·】——»
现代智能手机是功能强大的移动设备,它们是小型便携式计算机,具有强大的计算能力,可以实现各种功能和应用程序。与以前的移动电话相比,这些移动设备提供了更多的通信、信息和娱乐可能性。

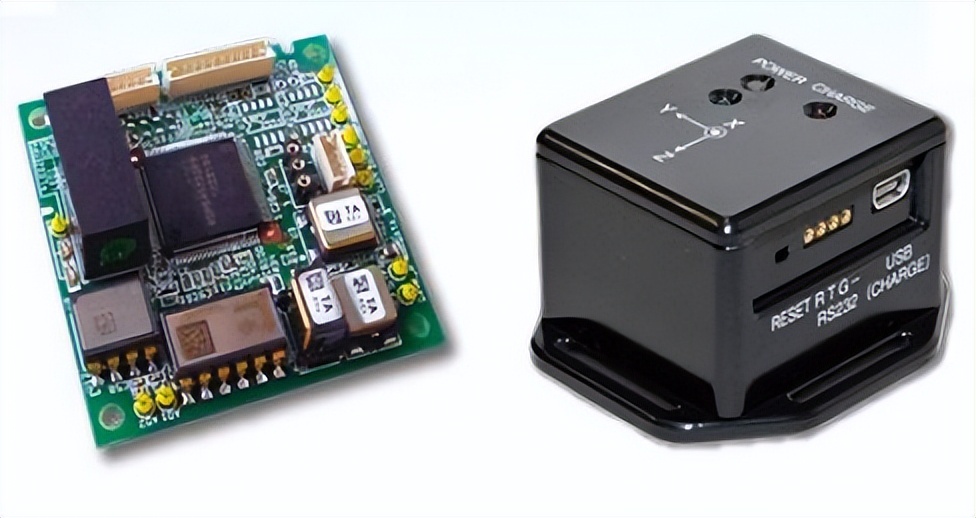
现代智能手机已经内置了各种低成本传感器,如三轴加速度计、三轴磁场传感器、三轴陀螺仪和气压计,这显著增加了其功能范围。
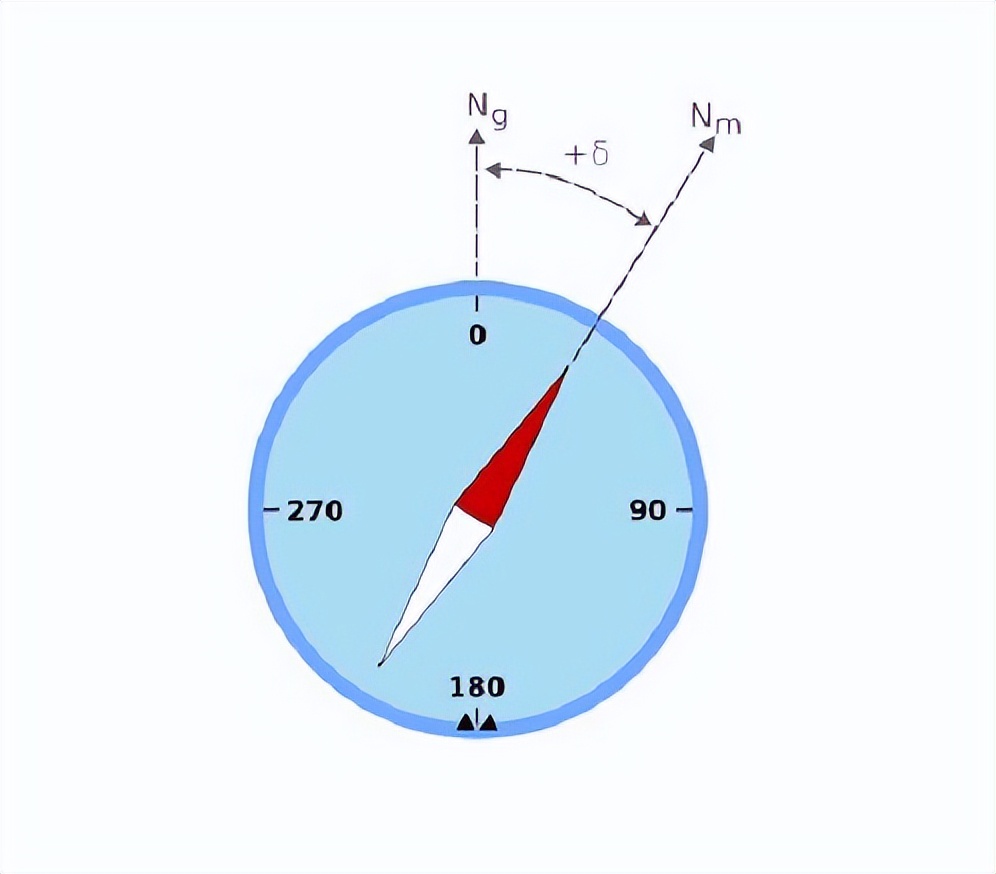
通过使用这些内置传感器,可以直接从传感器数据中提取用户的运动活动。例如,磁场传感器(磁力计)可以指示设备相对于磁北极的全球系统的方向,通常用作 指南针 。
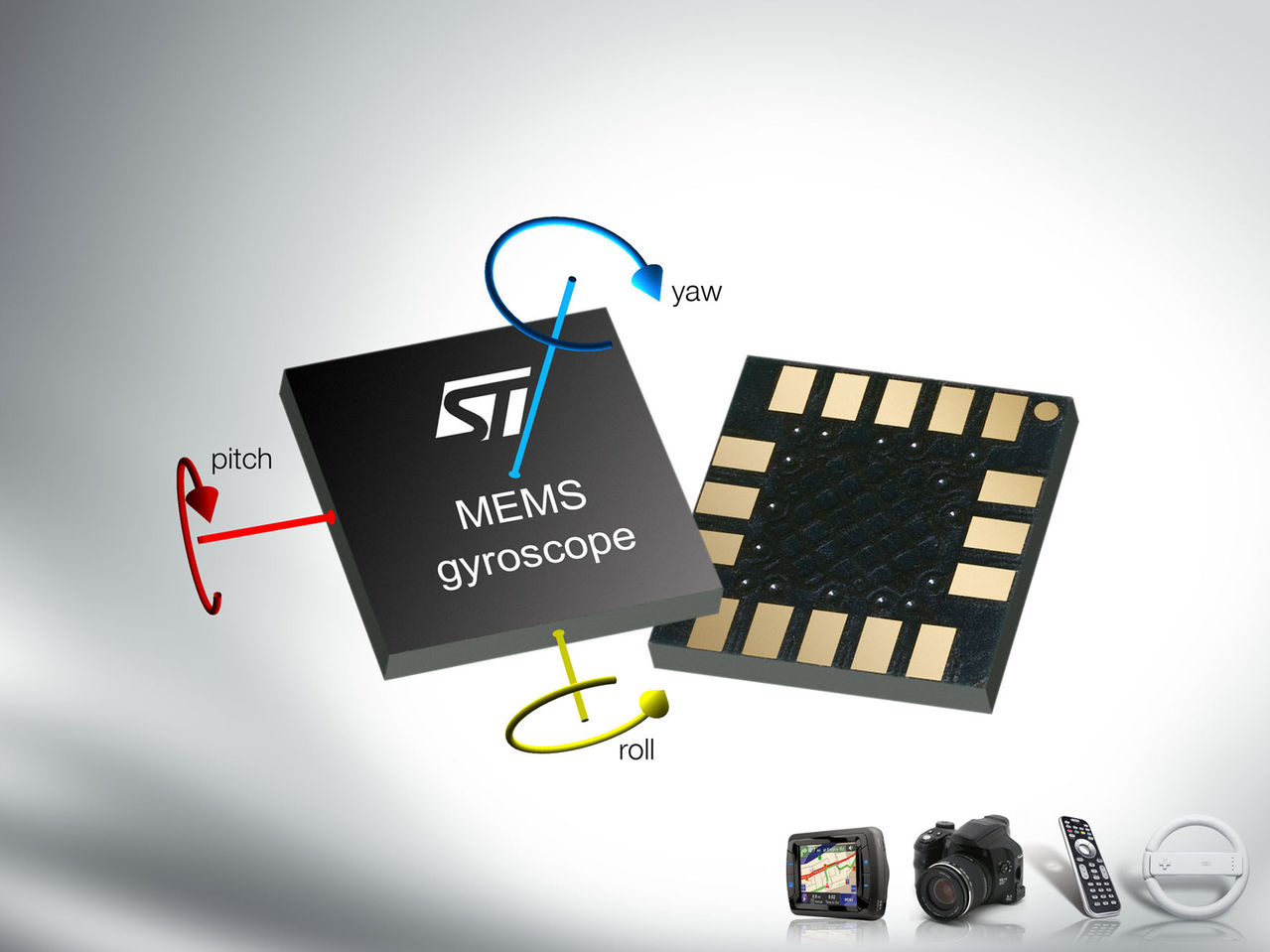
加速度计检测设备相对于地球重力场的当前状态,可以用于检测平移运动(例如智能手机的振动、旋转或倾斜)。嵌入式陀螺仪提供智能手机的旋转运动数据,气压计最后可以用于注册楼层变化的高度变化。

使用不同的解决方案来确定用户的运动,特别是行驶距离,从 MEMS传感器 中获取。
其中一种方法是通过对加速度值随时间的两次积分来计算行驶距离。这种方法的问题在于,有用的运动信息无法从噪声和偏差(传感器噪声、偏移漂移或设备引起的倾斜变化)中分离出来。
这些干扰对距离确定有重大影响,每次进一步测量时,导致的误差都会增加。
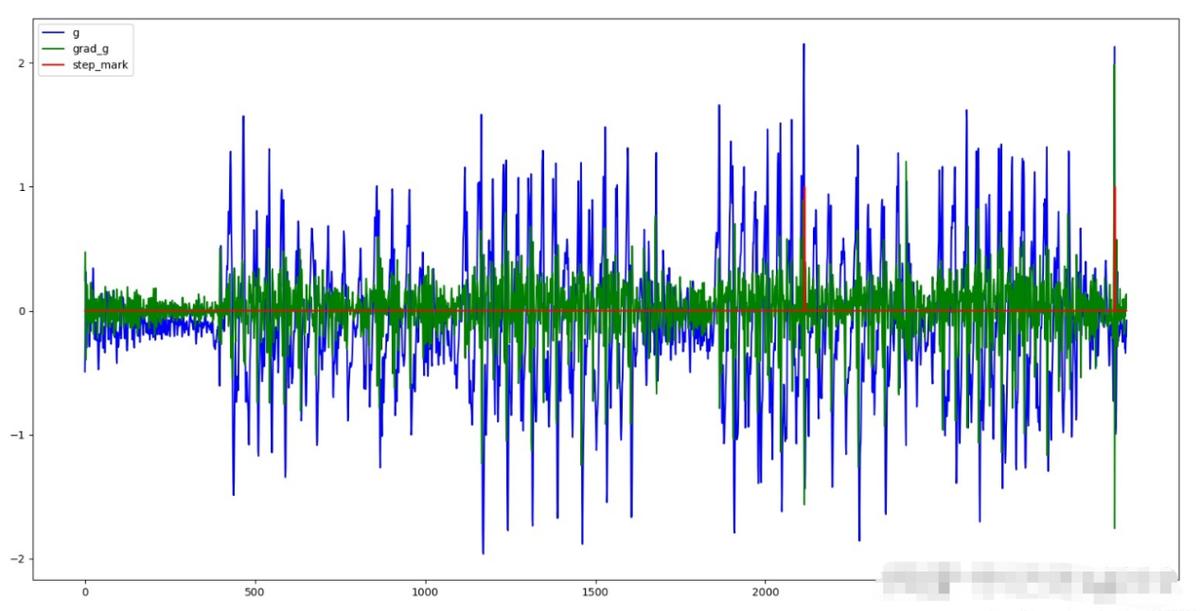
另一种方法专门针对行人,是通过在加速度信号中检测步数来进行距离计算。如果已知步数,则可以通过将其与步长相乘来计算距离。
自动步数检测受到用户的身体特征(例如步态或身高)、运动方式(步行、奔跑、爬楼梯、乘电梯上升等)或智能手机不同的佩戴情况(例如手、手提包或裤袋)的影响。

如果传感器特性在校准后发生变化,则步数和步长的确定可能不正确,导致距离估计错误。
除此之外,对人类复杂运动的建模也很困难。不过可以使用基于知识或机器学习方法作为替代来估计行驶距离,例如神经网络方法。
«——【·移动方向的确定·】——»
加速度计可以捕捉到三个轴(x、y和z)的重力向量。结合磁力计,可以确定相对于磁北极的绝对方向。
然而,这种计算仅在静止状态下有效,其中加速度信号仅受重力影响。另一个挑战是观测受漂移和干扰的影响。
特别是磁力计受到周围区域场的静态和瞬态磁干扰的影响,例如电梯、散热器或混凝土加固。

陀螺仪记录角速度(也称为旋转速度),描述了随时间变化的旋转角度(俯仰、横滚和偏航)的变化,并可用于确定运动方向。
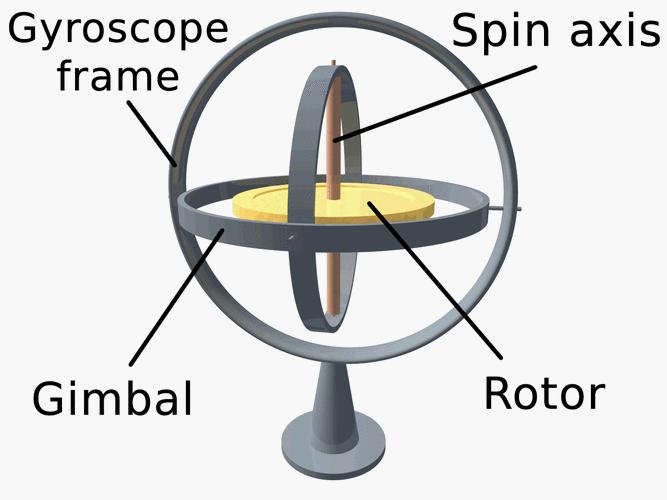
角变化是通过时间积分得出的。通过将所有角变化相加并将其乘以最后一次和当前测量之间的时间差,可以计算相对方向。
如果已知初始航向,则也可以确定绝对方向。优点是相对方向可以在运动期间检测到。但是,与加速度传感器类似,陀螺仪信号也会受到干扰的影响,从而使方向的质量失真。
为了减少误差的影响,所有三个传感器(加速度计、磁力计和陀螺仪)都进行融合(传感器融合)。
最初使用加速度计和磁力计确定绝对方向(初始航向)。使用陀螺仪观察到的角变化更新方向。

对于较长的测量周期,方向会在预定的时间间隔内,通过加速度计和磁力计的绝对方向进行校正,从而进行最小化陀螺仪漂移。
最后,需要实现智能手机坐标系到世界坐标系的转换,其中可以使用四元数。
«——【·高度的确定·】——»
通过空气压力,可以估计移动设备的高度,进而推断多层建筑中当前所在的楼层。标准大气环境下,温度和高度对气压的影响可以通过气压公式进行近似描述:

该公式包含参考高度上的空气压力p(h0),大气气体的平均摩尔质量M,重力加速度(g = 9.8062 m/s2),理想气体常数R,在开尔文温度下的平均温度T以及空气柱的高度h。
为了考虑大气压力测量的各种影响,方法是在建筑物内放置一台气象站,用于作为高度计算校准任务的参考。
特别是在与附近环境相比时,气压变化的幅度大致相同,因此不需要进行大气校正。在这些条件下,可以达到1至2米的精度,足以确定楼层(Real Ehrlich)。
«——【·递归贝叶斯估计·】——»
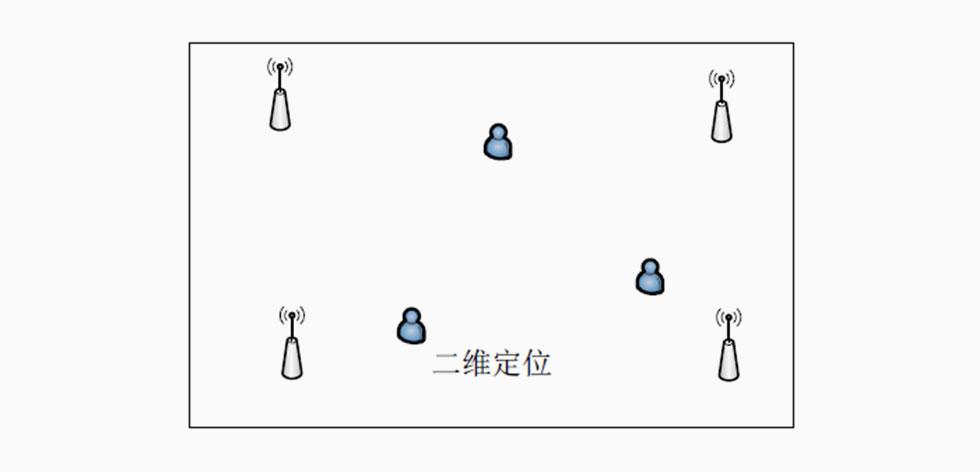
在确定楼层和高度之后,可以开始进行各自楼层上的二维定位。如果已知起始位置,就可以根据检测到的传感器数据中的移动活动来估计用户的位置,期间将采用“预测死区”的原理。
通常情况下,起始位置是未知的,这种情况也称为“全局定位”。由于MEMS传感器的漂移和误差易于出现,会导致高度测量偏差,从而增加了位置估计的不确定性。
数字建筑模型包含大量信息,例如建筑结构(墙壁、通道等),可用于室内定位。通过将移动与建筑信息进行比较,可以检查估计的位置是否合理,并因此减少位置确定方面的不确定性。
自主运动的几何参数估计通常是一种非线性估计问题。复杂的非线性和非高斯系统是无法解析求解的,可以采用基于顺序蒙特卡罗抽样的贝叶斯滤波器—— 粒子滤波器 。
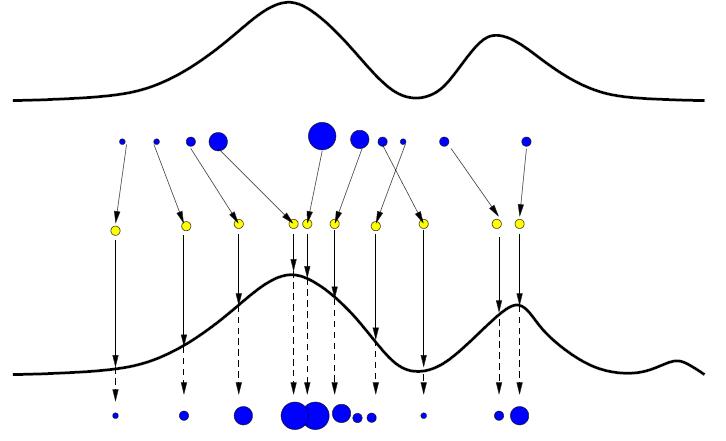
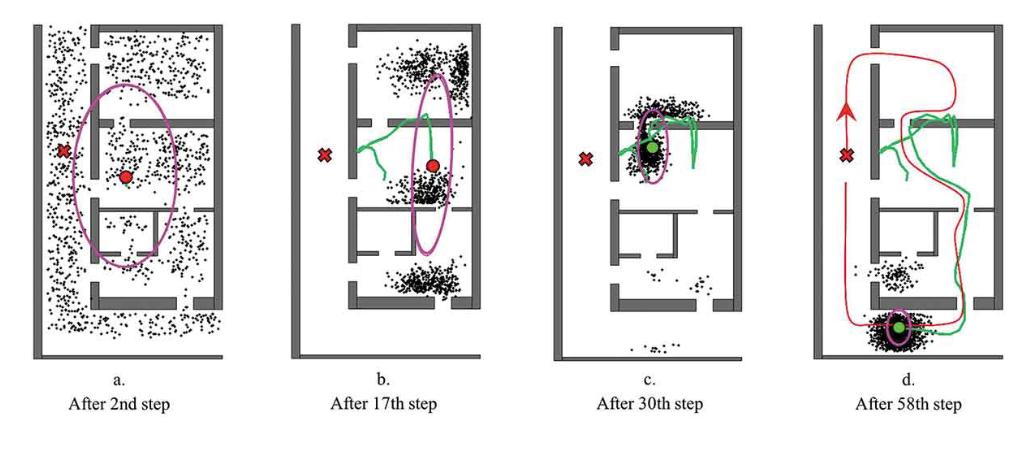
室内位置估计的粒子滤波器实现分为四个基本步骤:在初始化阶段,方法是将粒子随机分布在整个建筑区域内。
预测采样步骤中,利用过去的测量观察结果,根据“预测死区”的原则,预测每个单独粒子的新位置。
从最后三个观测到的步骤中预测距离,方向结果来自陀螺仪测量。在重要性抽样(校正)步骤中,每个粒子都会收到一个权重wk(2),该权重取决于预测位置(xk ,yk)与实际观察到的位置(zxk,zyk)之间的差异。
为了更稳健地进行位置估计,特别是面对 粒子耗尽 (也称绑架机器人问题),采取了以下策略。
将机器人重新定位(绑架)到一个未知位置是机器人技术中常见的问题。在这种情况下,机器人必须自主意识到其位置无效,并重新开始新的定位。

基于粒子滤波的智能手机室内定位可能出现同样的问题,由于传感器误差,移动数据可能会被错误地解读,从而导致位置估计不准确,与实际位置不相符。
如果通过位置估计建立的粒子分布(表示为一种分布椭圆)恶化或估计位置在步骤之间发生较大变化,则需要使一些粒子在大楼内随机分布以重新覆盖状态空间。
«——【·外部定位系统·】——»
除了将建筑结构整合到粒子滤波器中,还集成测量或观察基于BLE信标、磁异常或WLAN接入点的外部定位系统,以支持和优化实时位置估计。

由于建筑物内WLAN接入点的广泛可用性,以及技术设备标配WiFi技术,基于WLAN的系统非常适合行人室内定位。
在WLAN系统中,基于比较经验测量值(例如接收信号强度)的指纹方法被认为是首选方法。
该方法分为两个阶段。在第一阶段-离线阶段(也称为校准阶段),会扫描建筑区域。每个位置都会被分配一个信号模式,也就是指纹,并存储在数据库中。结果就是所谓的无线电地图。
在第二阶段——在线阶段或定位阶段,将准备确定位置。这里,当前的测量值与数据库中的指纹进行比较,寻找最佳匹配,可以使用确定性或概率算法估计位置。
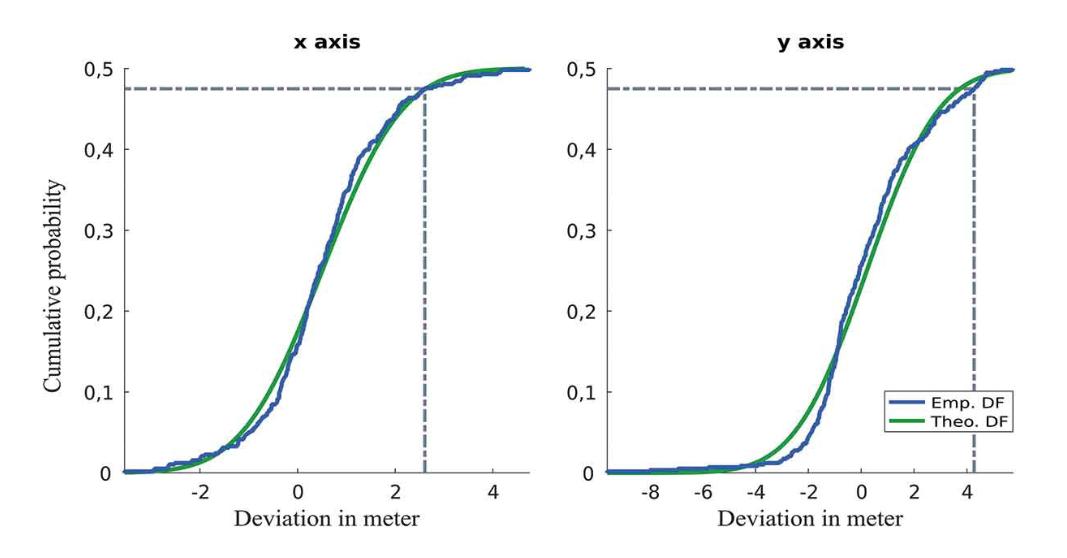
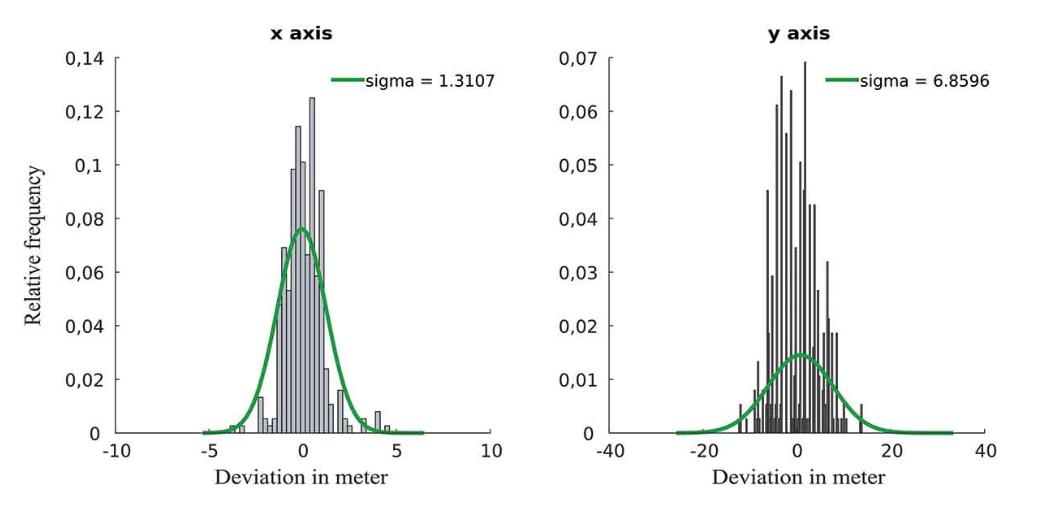
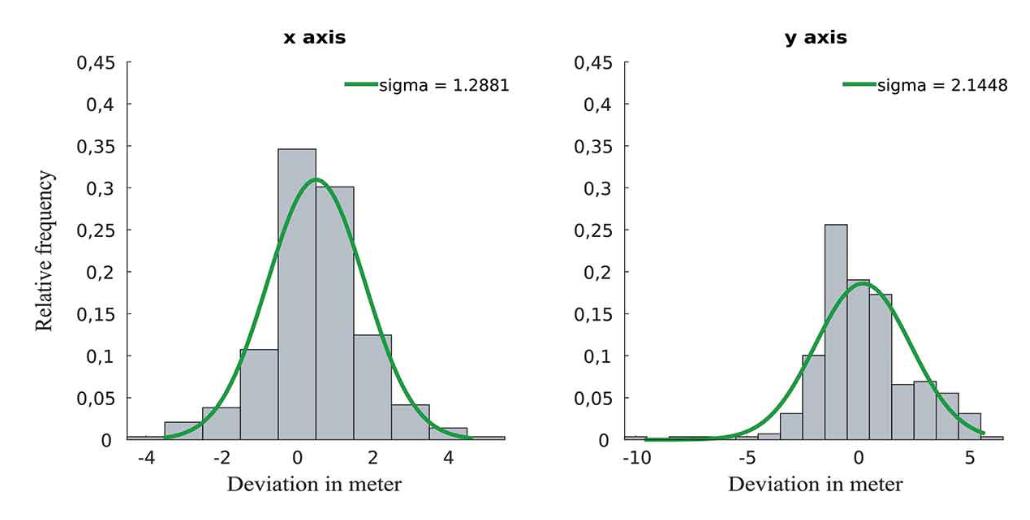
由于WLAN信号由于遮挡或干扰而产生的波动很大,因此位置确定的精度在2~10米范围内。从实验得出的统计分析显示,在坐标轴(X轴和Y轴)上的位置偏差大约对应于正态分布。
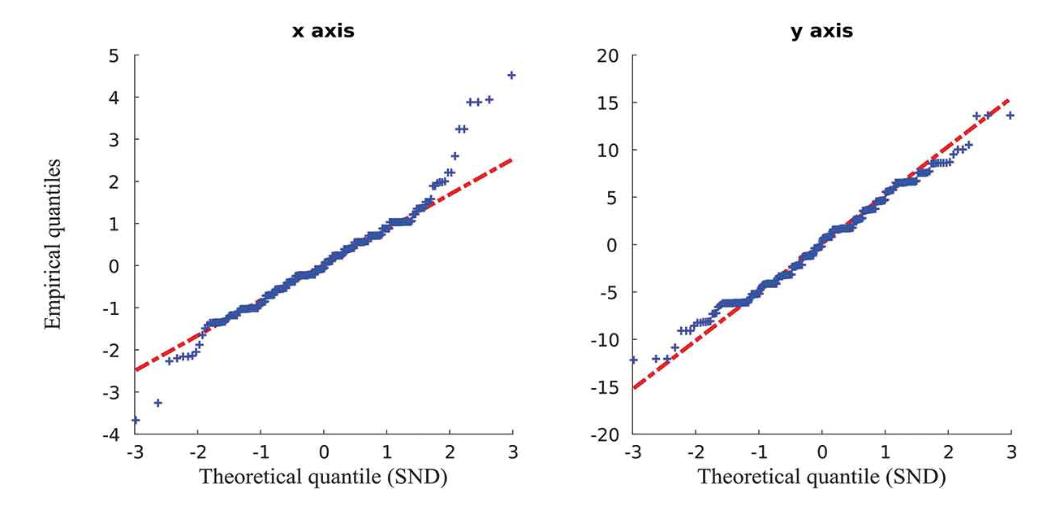
估计位置与实际位置之间的偏差由一个经验密度函数和一个经验分布函数表示。频率密度显示了位置误差的离散程度,从经验分布函数中可以看出参考点的累积偏差。
实验还给出了一种区间估计,其中位置估计在某个概率范围内。对于即将进行的研究,假设置信区间为95%。
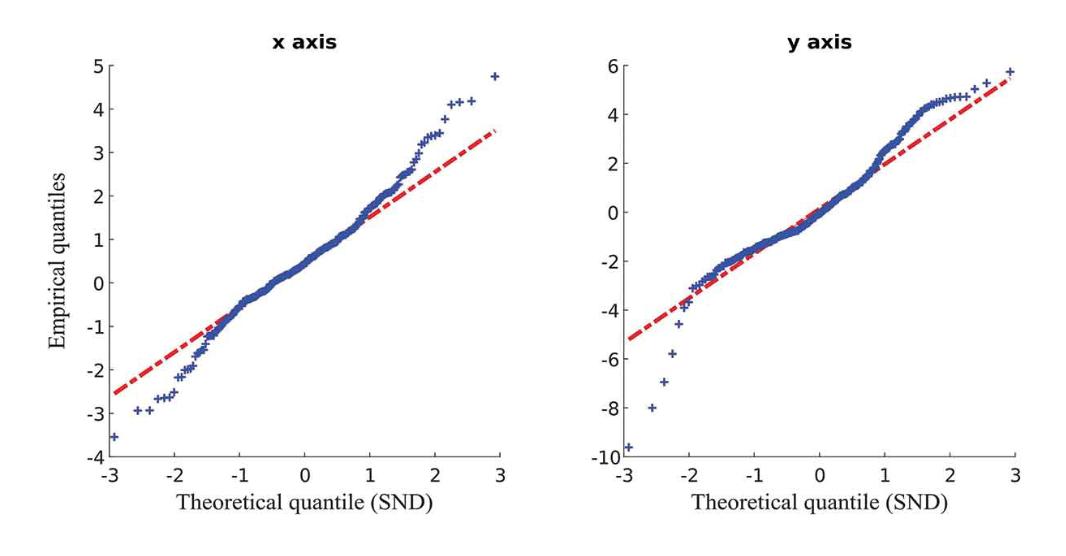
量化-量化图用作表示经验分布与给定理论分布一致性的指示,QQ图和直方图可用于识别异常值或分布可能的偏斜。
«——【·基于RSS的蓝牙定位·】——»
低功耗蓝牙(BLE)能够以最小的能量消耗进行无线通信,接收到的信号强度(RSS)允许装备有蓝牙的智能手机接收到与BLE发射器之间大致距离的估计值。
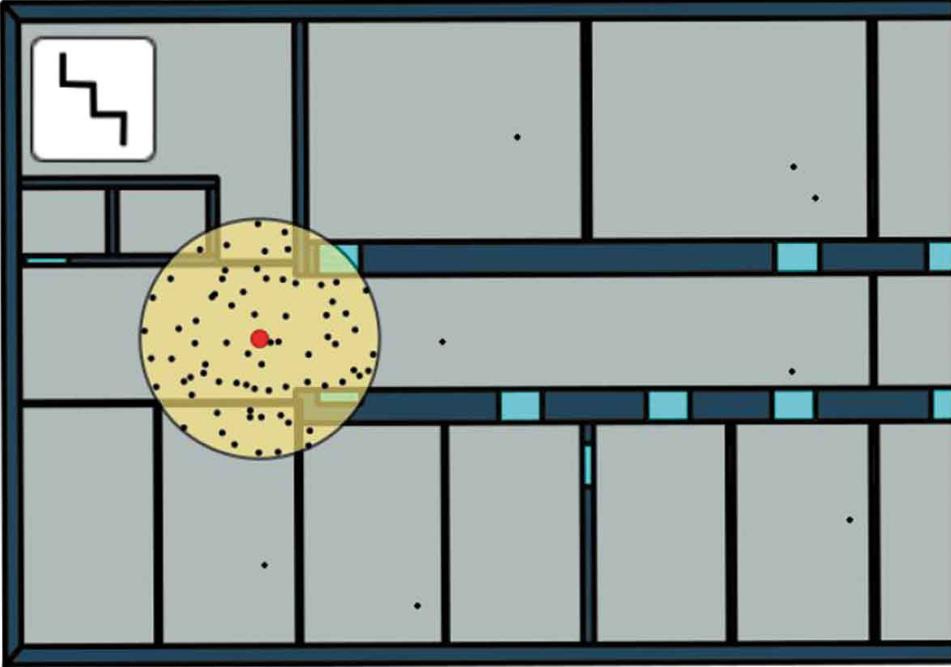
可以使用已知位置的永久安装BLE信标的标识号,来校正传输区域内的位置,Bluetooth信号被添加到粒子滤波器中,依照以下限制进行调整:位于BLE信标可观测范围内的粒子具有更高的权重。

结果显示,粒子集中在真实用户位置处,传输范围取决于传输功率,并设置为以下检查的3m。
为了确定粒子权重,还使用了两个概率分布的混合模型。与基于RSS的WLAN定位相比,假设信标的信号范围内分布均等。
«——【·实验结果评估·】——»
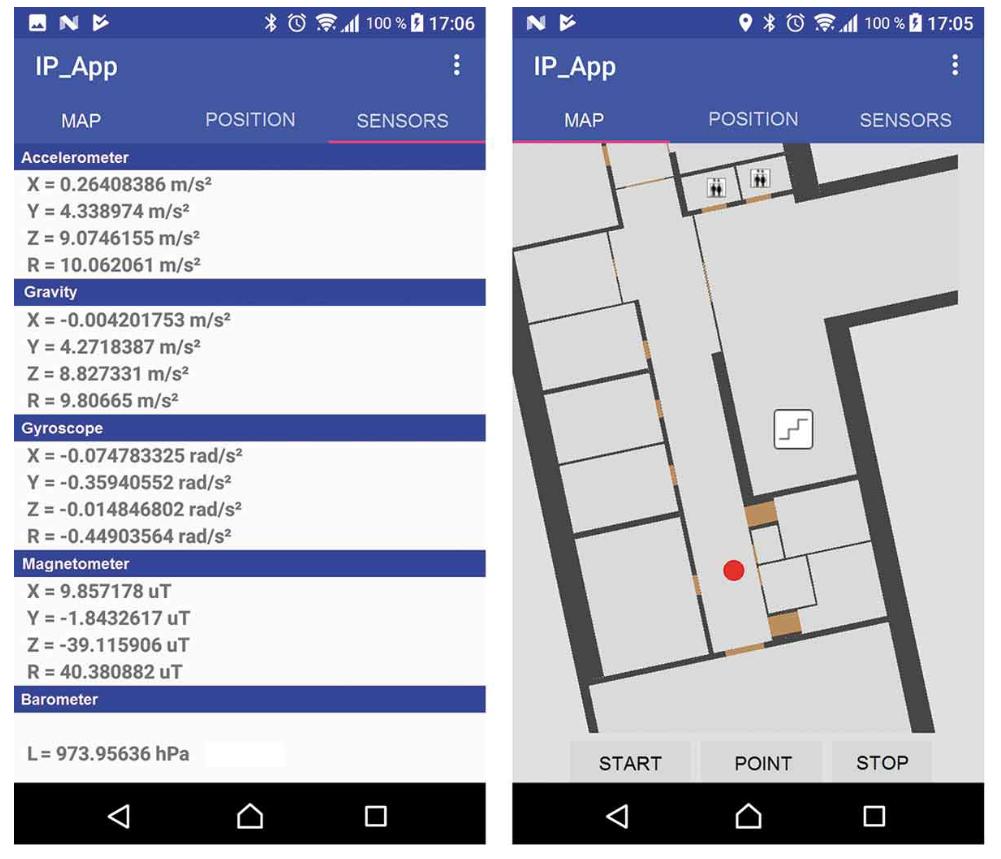
智能手*定位机**方案在最受欢迎的移动平台Android上进行了评估。

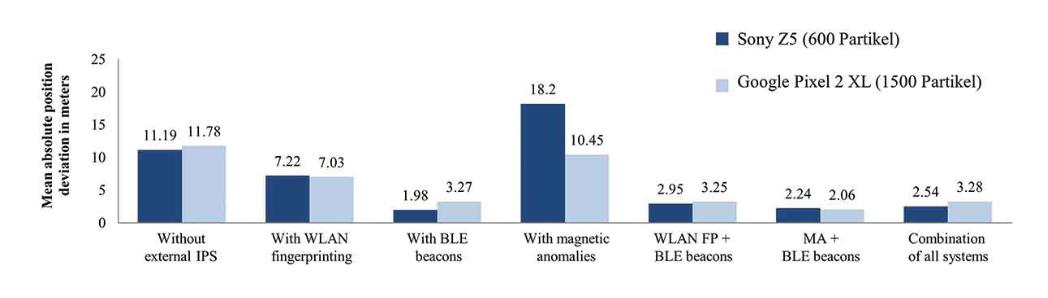
使用的设备为 Google Pixel 2 XL 和 Sony Z5 Compact,均装备有多种微电机系统(MEMS)传感器:陀螺仪、加速度计、气压计、磁力计、蓝牙、全球卫星导航系统(GNSS)、无线局域网(WLAN)、摄像头等。
为了获得可靠和准确的位置估计,需要大量粒子。由于所用智能手机的处理器性能限制,Pixel 2 XL 的位置估计限制为 1500 个粒子,而 Sony Z5 仅有 600 个粒子。
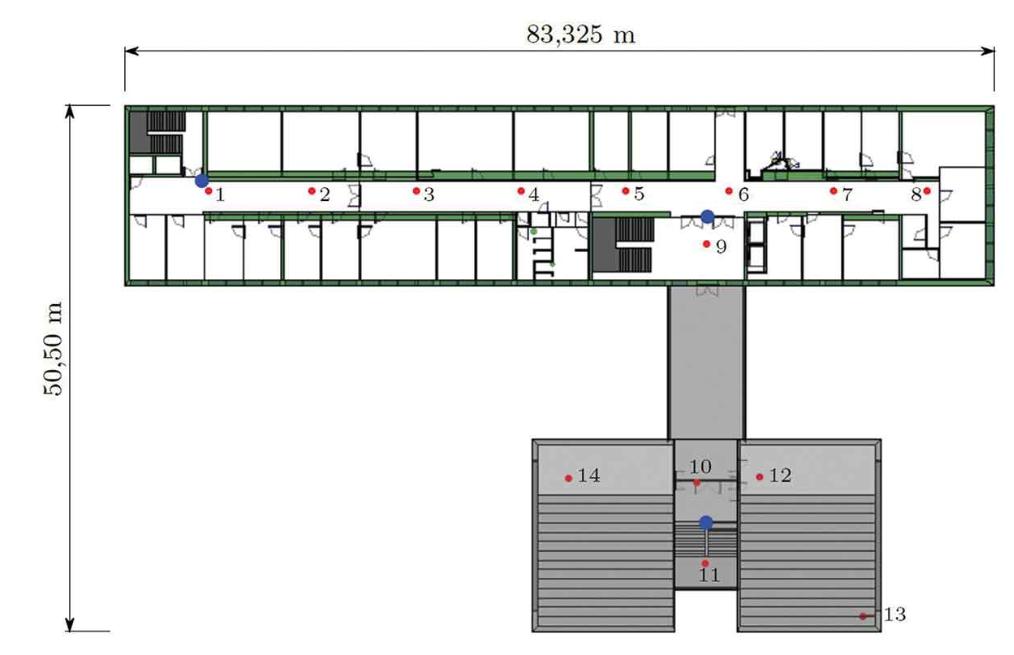
测试在一座大学建筑内进行,内饰包括讲堂和办公室常见的桌椅、办公家具和工作站。为了评估定位精度,创建了一个测试区域,由两层分布的35个地面真实点(参考点,RP)组成。在移动中进行了估算位置与地面真实位置偏差的分析。
应当注意到,实际上很难将脚精确放置在地面点的正中间,因此会出现高达30厘米的偏差。一次测试跑步(145到260米)大约需要五到十分钟。
定位精度还取决于建筑结构,没有使用外部IPS的结果中出现的大位置偏差是由于估计位置与真实位置之间没有一致性。
由于测量的不确定性,尤其是指向测量偏差高达45度,并且部分甚至更多,因此确定了一个错误的位置。
测试建筑物是对称的,并且具有少量区别特征。相应地,粒子遵循虚假假设的风险增加。
可以看到随着粒子数量的增加,位置准确性也会提高。如果粒子数量受到计算能力限制(<1000个粒子),则可以使用其他外部室内定位系统进行辅助。
通过外部室内定位系统,特别是BLE信标,可以实现强大和精确的位置确定。 WLAN指纹识别的精度在2到35米的范围内(取决于无线电地图的时效性和建筑物内人们的活动情况),并影响混合位置估计的值。
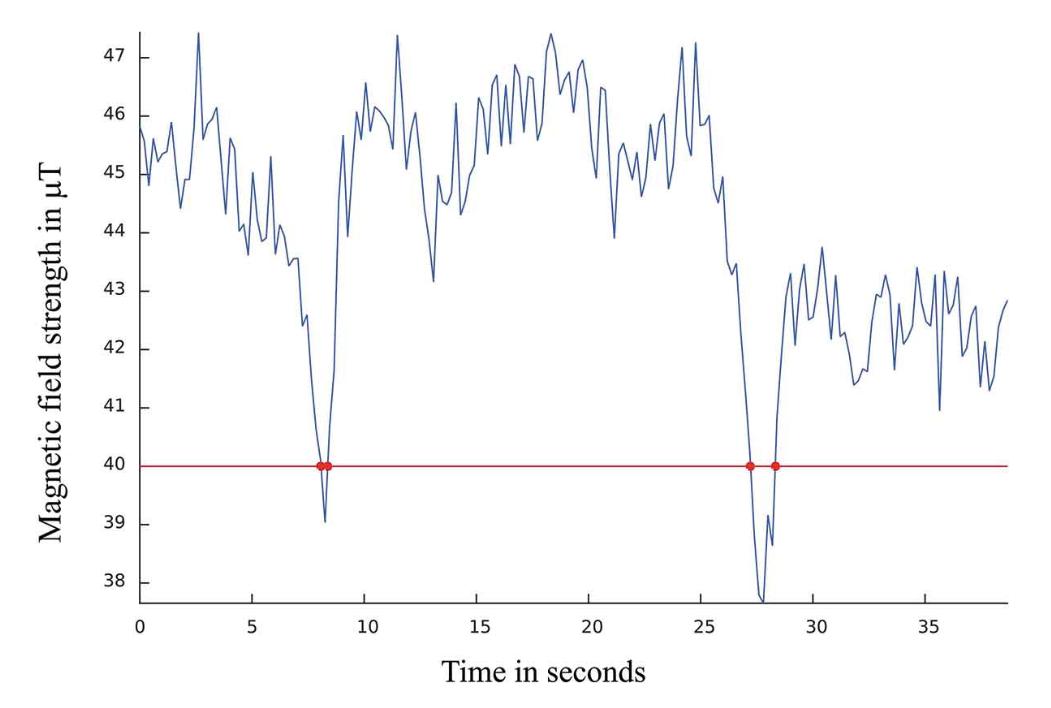
使用磁异常进行本地化有时会失败,因为磁异常与建筑构件之间没有关联。因此,在检测到异常时,粒子经常集中在错误的位置上。
由铁和钢构件引起的建筑物中的其他磁扰动会扭曲位置估计。通过组合定位法(特别是BLE信标和MA在四楼的融合),可以实现更强大和准确的位置确定。
«——【·结论·】——»
智能手机是用于定位服务的用户友好、成本效益高且易于安装的大众市场位置系统的 最佳工具 ,因为它们被广泛使用并有大量内置传感器。
研究人员提出了一种实时基于智能手机的行人室内导航系统,通过内置传感器确定智能手机用户的运动情况。
结合建筑模型,过滤掉错误的位置估计(例如在墙内)或移动(例如穿墙而过),以改善粒子滤波的位置估计。使用外部定位系统,可以最小化多个粒子群的形成,以支持位置估计。

研究通过WLAN指纹技术和蓝牙信号技术的优化达到了良好的效果,特别是集成BLE信标后,该系统的精度得到了提高。
通过在室内定位中使用粒子滤波器,可以轻松地扩展系统,从而提供进一步的机会。通过包括其他技术(例如可见光通信)和计算方法(栅格化等),可以进一步优化定位的质量和可靠性。

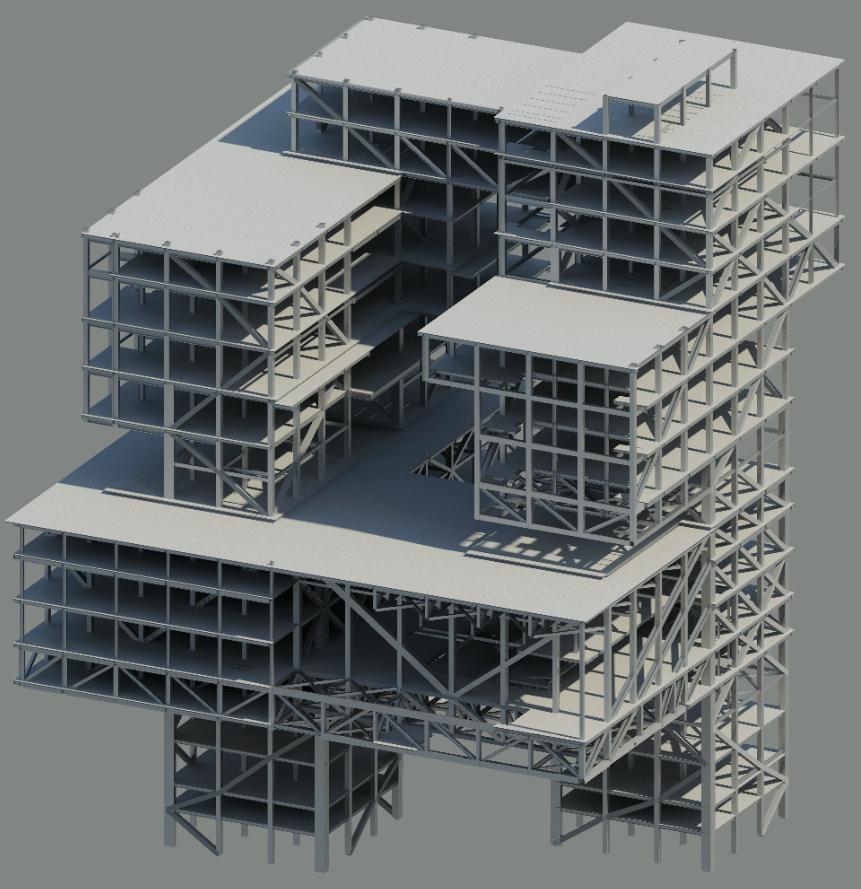
利用数字三维计算模型越来越重要,例如建筑的规划和运营(建筑信息模型BIM)。为描述和存储数字建筑模型,可以使用CityGML数据模型,这是一个OGC标准,用于在不同细节级别(LOD)下交换3D城市模型。

最高级别的模型(LoD 4)包含室内的三维几何形状以及其他建筑构件(建筑设施和设备)和属性值(材料)。这些信息也可以用于粒子评估,例如,可以使用类似防火门的铁质部件和管道来执行额外的位置校准。
参考文献:
1.Ayub, S., A. Bahraminisaab, and B. Honary. 2012. “A Sensor Fusion Method for Smart Phone Orientation Estimation.” In 13th Annual Post Graduate Symposium on the Convergence of Telecommunications, Networking and Broadcasting. Liverpool, UK, June 25–26.
2.Bahl, P., and V. N. Padmanabhan. 2000. “Radar: An In-Building RF Based User Location and Tracking System.” In Proceedings of IEEE INFOCOM. Tel Aviv, Israel, March 26–30.
3.Beauregard, S., and H. Haas. 2006. “Pedestrian Dead Reckoning: A Basis for Personal Positioning.” In Proceedings of the 3rd Workshop on Positioning, Navigation and Communication. Hannover, Germany, March 16.
4.Benning, W. 2010. Statistik in Geodäsie, Geoinformation und Bauwesen, 3. Auflage. Heidelberg: Wichmann Verlag.
5.Berg, L. 2016. “Realisierung und Evaluation eines WLAN-basierten Indoor-Positionierungssystems für Android-Smartphones.” B.Sc. Thesis, RWTH Aachen