渡众机器人利用多融合传感器技术来感知道路交通环境信息,并将传感器获取的车速、位置、障碍物等实时信息反馈给系统进行信息处理,同时根据路况与车流的综合信息判断和分析可能存在的潜在安全隐患。
并在紧急情况下进行自动预警提示,系统结合周围环境情况,为汽车进行避障路径规划设计,根据路径进行制动或转向(左换道、右换道、自适应巡航、制动等)等措施协助,控制汽车主动避开障碍物,以保障车辆顺畅、安全的地行进。
一、避障方法
利用高精地图提前为自己规划出最优的路线。但是在车行进过程中,由于不可预测的因素和高度动态的道路环境,障碍物(行人、车辆、其他障碍物等等)有可能出现在原先规划出的线路中,因此自动驾驶车必须有对这些不可预测的障碍物进行快速准确实时的侦测识别,并进行局部避障路径规划和调整,从而使汽车能够顺利到达目的地。目前,自动驾驶车辆避障方法有:
传统避障算法 人工势场法,利用目标点进行引力作用,引导车辆向目标点行进,如遇到障碍物则产生斥力,避免车辆与障碍物发生碰撞,从而形成无碰撞的引力引导下的最优路径。虚拟力场法,是栅格法和人工势场法相结合的一种实时避障算法,使用栅格来表示环境,同时利用引力和斥力进行控制避障。 智能优化算法 智能优化算法是在生物智能和物理现象的基础上进行的搜索算法,它涵盖了障碍物生物和物理特征的识别算法,是通过传感器获取的信息与原先设计的规则和数据库进行比对判断,然后模拟人类驾驶思维利用车辆运动学原理对行进路线进行调整规划。 多种算法融合 在自动驾驶汽车实际避障规划设计过程中,往往会融合多种算法,通过互补来提高算法的效率和准确性,从而能够更加智能的规划设计和控制车辆,让车辆能够高效准确的融入驾驶环境中,实时调整和改变,提高其对现实复杂路面多障碍物的应对能力,从而实现避障。
二、动态避障实现
如何合理的输出轨迹是自动驾驶的关键。分为以下三个方面来实现:周围车辆预测,轨迹初始化,避障优化轨迹。
1. 周围车辆预测
感知模块分析出周围车辆、行人的位置、速度、朝向,利用物理运动规律,需要本车从更加宏观的角度来看待这些对象,例如未来和本车的位置关系,甚至根据当前环境的信息,提前对其他车辆和行人的行为进行理解。因此分为两个层面来讲解:a. 多目标跟踪预测, b. 驾驶员行为理解。
多目标跟踪预测
多目标跟踪主要任务是在给定视频中同时对多个感兴趣的目标进行定位,并且维持他们的ID、记录他们的轨迹。主要要解决的问题: 确定跟踪目标的数量、维持各自的ID、轨道初始化和终止、多目标之间的影响。
驾驶员行为理解
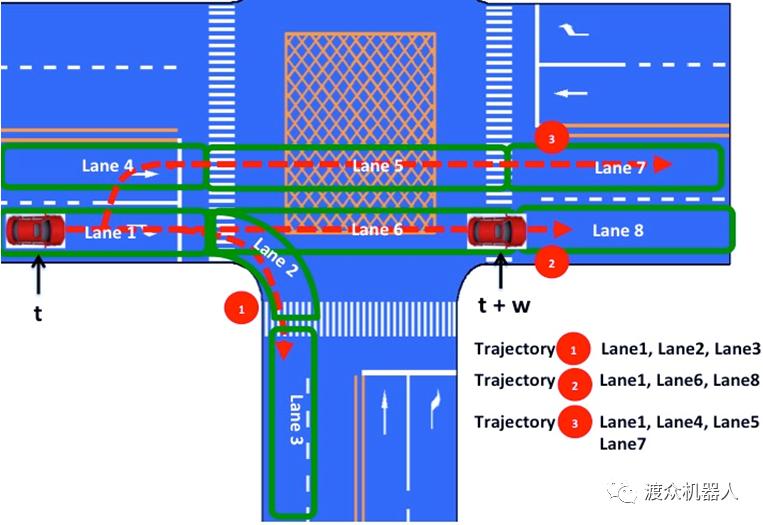
宏观层面的行为预测问题,往往可以抽象成经典的机器学习问题,并且利用基于大数据的深度学习技术来解决。总之解决的方法只有统计的方法 ,如下图车辆有Lane1、Lane2、Lane3、Lane4、Lane5、Lane6.几种选择,当判断出车辆的行为时,方便我们对接下来的轨迹做出准确估计。
2. 轨迹初始化
轨迹初始化主要是由行为规则决定的,由车道线和行为规划决定,不考虑目标位置,和目标的行为,生成当前的车道中心线、转弯线、换道轨迹、路口引导线等等。
同上,轨迹的初始化还是在感知模块基础下,包括拓扑地图、利用行为规划的决定,选择合适的预瞄点和轨迹。
3.避障优化轨迹
轨迹可以采用优化问题来解决,谈到优化问题我们需要知道优化的约束和优化目标,其中约束分为这几个方面:交通规则+避免碰撞+运动学条件,优化的目标是人乘坐的舒适性。