无线电通信技术的迅速发展,提高了计算机处理能力,逐步完善了相应的系统结构。一种新型测量技术——激光雷达,使得快速、准确、实时化的采集和处理海量的三维数据成为可能。车载激光雷达技术结合了激光扫描、全球定位系统、惯性导航系统以及摄影测量等多种技术形式,是一种新兴的空间测量技术。这项技术的应用能够帮助人们更精准地获取地表三维空间信息,打造一个立体化的数据分析模型。
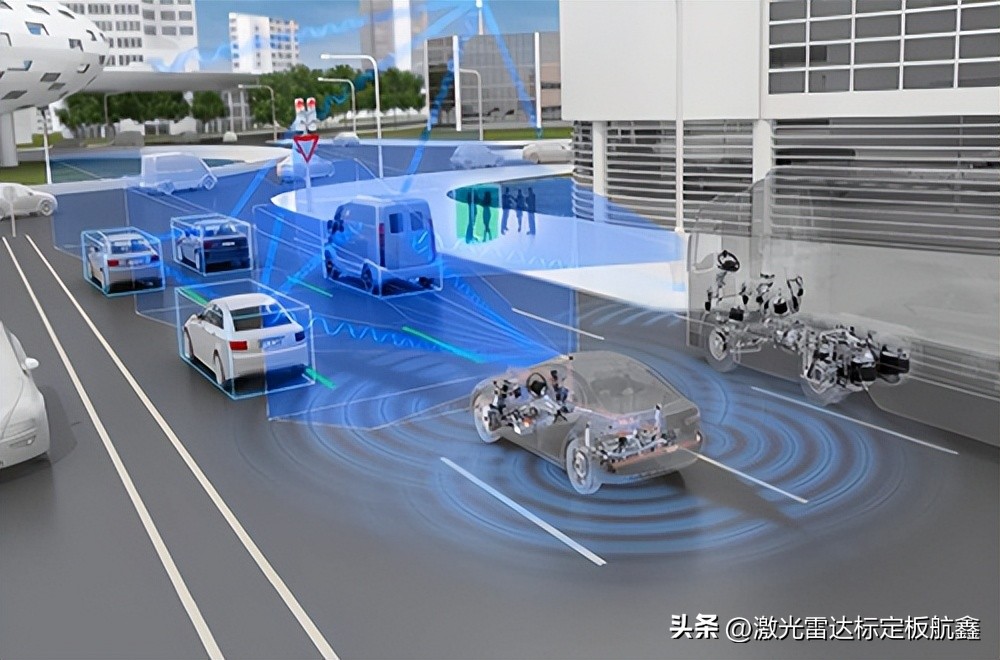
车载激光雷达是一种集激光、全球定位系统以及惯性导航系统3种技术形式为一体的空间测量系统。车载激光雷达系统包含激光扫描仪、全球定位接收机、惯性导航系统及数码控制元件等[1]。这些系统被统一安装在载体汽车上,在使用过程中通过主动向外界发射激光脉冲,接收外界反射回来的反射脉冲来记录机械运作需要的时间,全面了解激光扫描仪到达周围事物的距离,并结合定位定向系统(Position&OrientationSystem,POS)测量周围事物的三维坐标。
车载激光雷达系统的设计包含3个主要的零部件,分别是车载激光扫描仪、数码相机以及定位定向系统。在整个系统的运作中,车载激光扫描零部件的设计和应用需要全面收集三维激光点的云数据,在收集数据信息的同时及时测量周围事物形态,全面了解周围事物的回波强度和波形。车载激光雷达系统中的数码相机用来拍摄周围影像数据和POS系统测量设备在某一个瞬间的位置和姿态,利用全球定位系统确定空间位置。
车载激光雷达采用先进的空三定位技术。第一,它集成了全球定位系统和惯性导航技术,在导航系统的作用下能够精准化物体的空间位置。第二,获取的数据信息密度高。车载激光点云数据信息由激光直接测量获取,理论上的精准度达到0.15m,最高程的精准度可以达到0.10m。第三,具有较强的穿透外界事物的能力。车载激光雷达系统在多次回波操作后,当任何一个激光穿越周围事物时都会相继返回周围事物等多类高程数据信息,在对外界事物测量的过程中最大限度地确保信息的真实、准确。第四,数据测量不会受到阴影和太阳光线的影响。车载激光雷达系统采取的是主动的激光测距方式,测量操作不依赖自然光,且测量数据的精准度不受太阳光线、周围事物的阴影等影响。
车载激光雷达的应用优势体现在以下几方面。第一,成果测量精准度高。在车载激光雷达航测技术的作用下,人们能够直接获取三维激光点云数据信息。与传统测量仪获取信息相比,整个操作流程更加简洁方便。三维激光雷达系统获取新的原始点密度要比传统测量仪获取原始点的密度高,平均每平方米能够获取几十个原始数据点,远超其他系统。

航鑫光电激光雷达标定板稳定性好,可获得重复的准确数据。适用于自动驾驶距离、标识测试和遥感目标等领域,不掉粉不变黄,具有近完美的朗伯特性。航鑫光电漫反射板采用独家喷涂工艺,可以提供多种反射率拼接的漫反射板,进行无缝拼接。