直升机机载电子设备串联舵机检测方法-A
直升机机载电子设备串联舵机机虚拟化仪表试验器设计-5
编写:贺军
1、概述:
直升机机载电子设备串联舵机是直升机驾驶执行器,将伺服放大器的输出电压转换为线性机械运动,对飞行中各种飞行姿态进行控制的重要部件,该部件可以受自动驾驶控制,也可以受手动操作杆控制进行姿态变化。
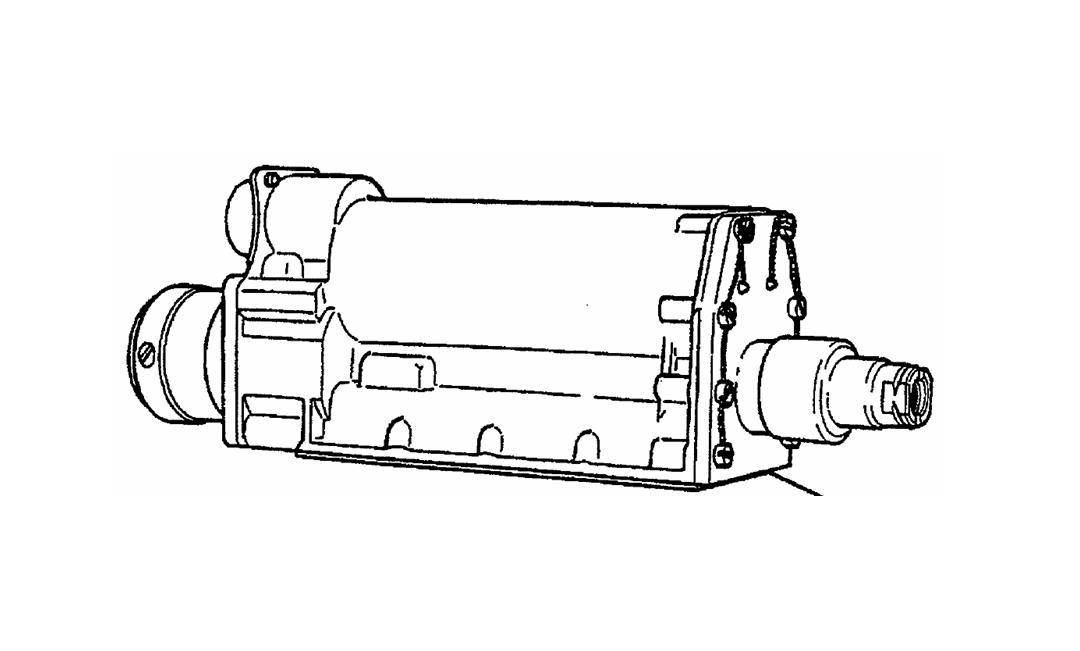
驾驶执行器以六角形外壳的形式出现,包括以下内容:
- 铸造套管,
- 一个直流永磁电机,或根据型号提供的两个电机,
- 一个减速箱和一个螺母和螺钉系统,将旋转运动转换为一个线性运动,
- 扭矩限制器,
- 机械装置停止,限制输出轴的运动,
- 具有两个直线电位器轨道的位置中继器装置。或者根据模型,只有一个,
- 一个电气连接器。
根据安装在驾驶执行器上的尖端,后者需要各种不同的参考资料。
“直升机机载电子设备串联舵机机虚拟化仪表试验器”是检测“机载电子设备串联舵机”的各项技术指标的试验器。
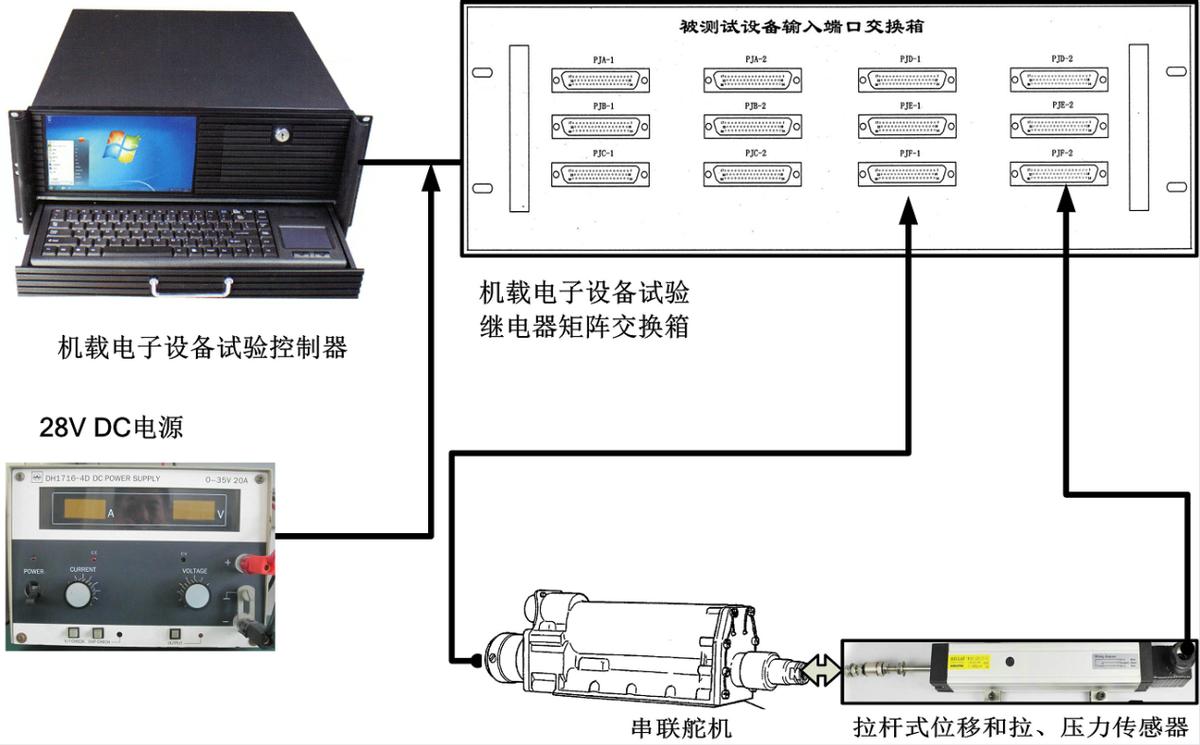
“直升机机载电子设备串联舵机机虚拟化仪表试验器”系统组成如下图所示:
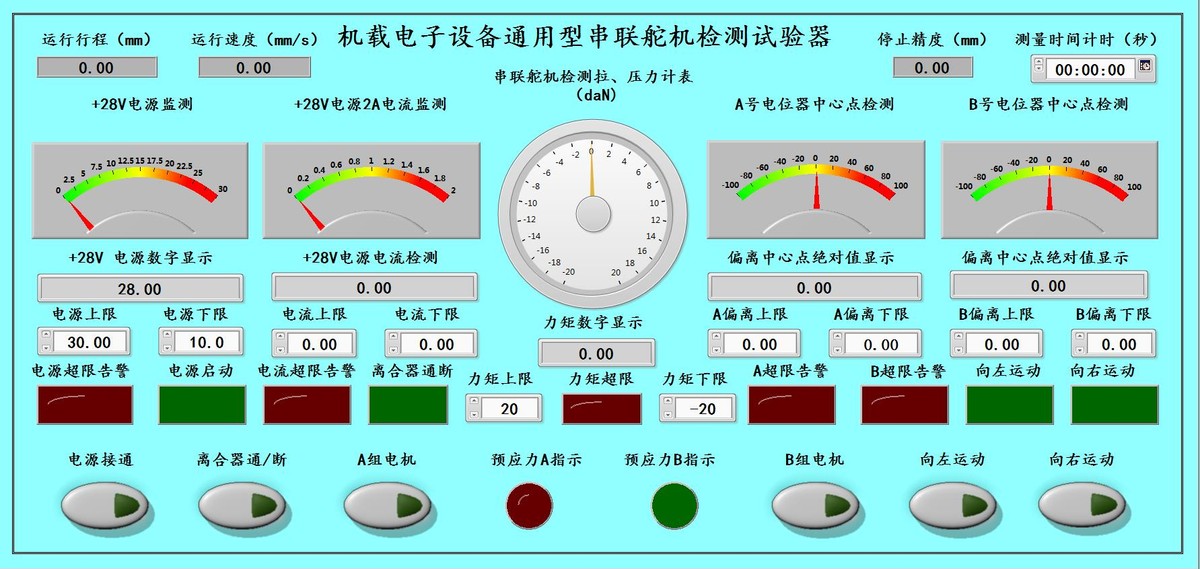
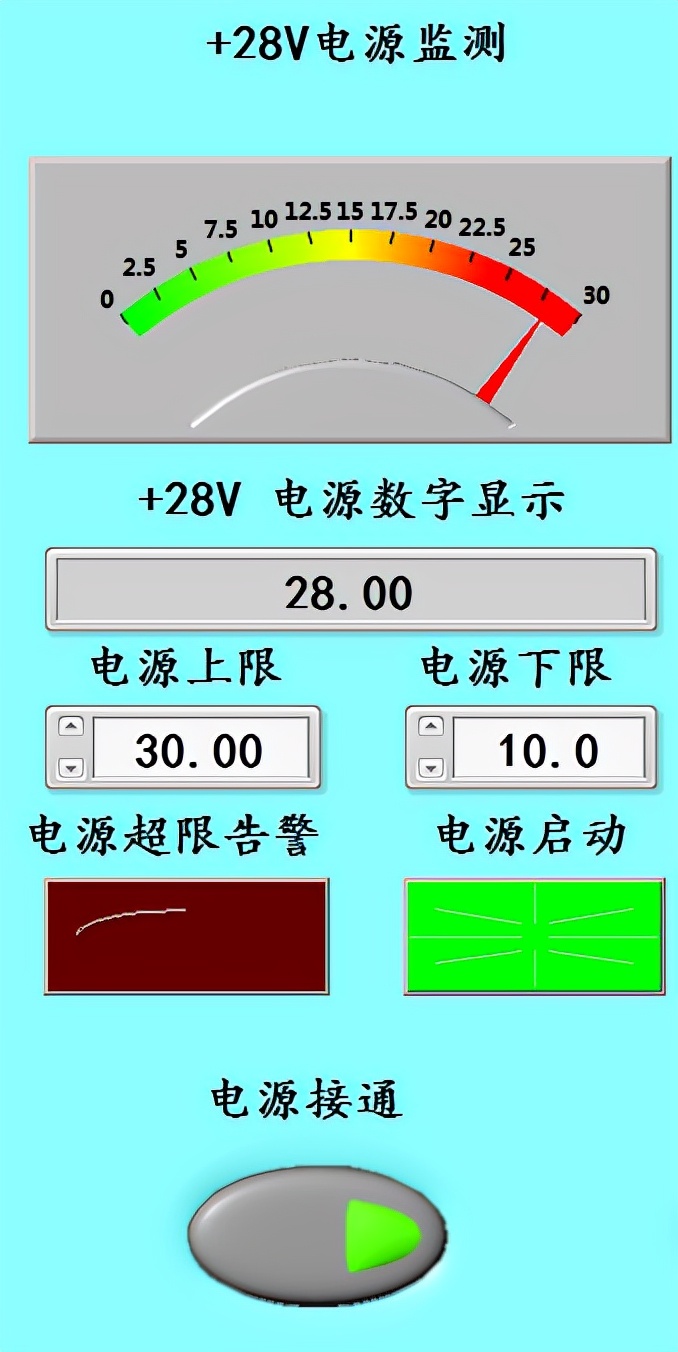
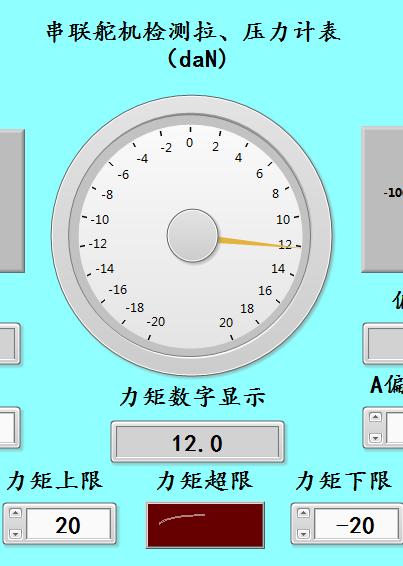
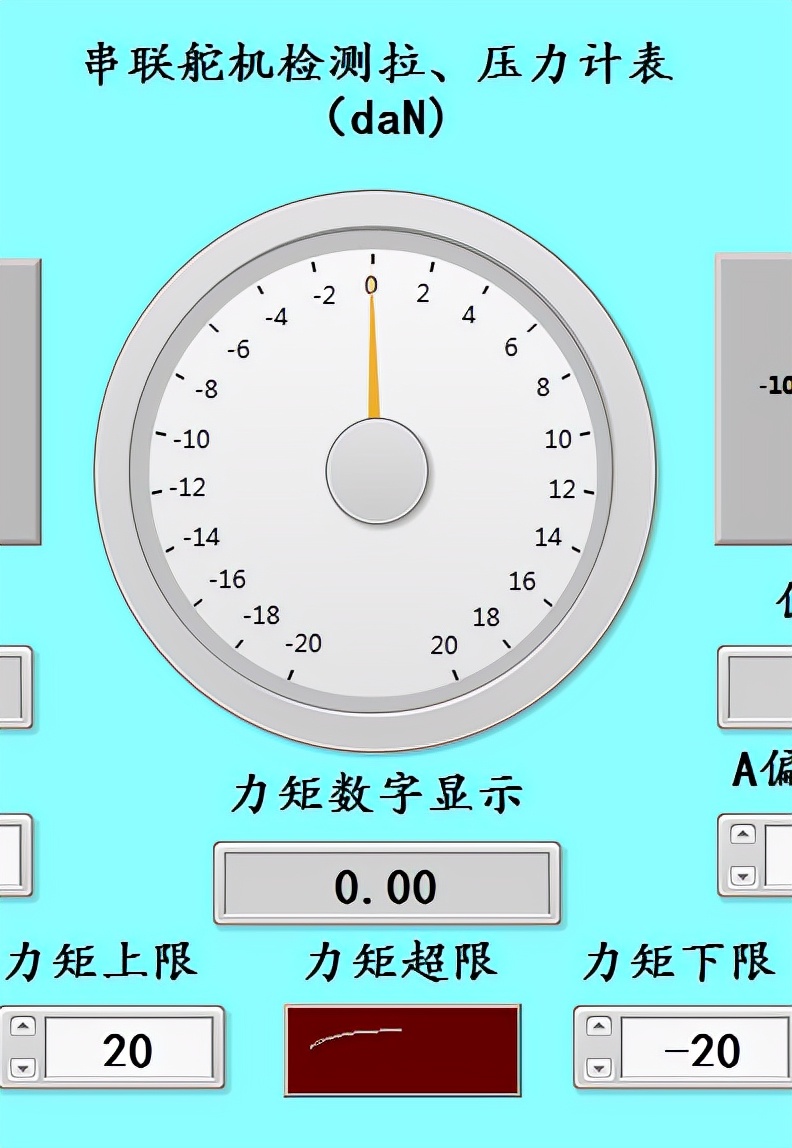
“直升机机载电子设备串联舵机机虚拟化仪表试验器”检测屏幕显示如图所示:
直升机机载电子设备串联舵机机虚拟化仪表试验器设计-5
直升机机载电子设备串联舵机检测方法-A
测试和故障隔离
1、概述:
本文描述由自动化过程执行器的操作测试和检查。
- 能够确定应退出服务的设备的状态,或在更换有缺陷的部件后检查是否正确进行重组的测试。
2、测试和测试的条件
除非另有规定。试验和调整应在正常工作条件下进行,即:
A、环境条件
在760 mm(29.92英寸)的汞柱压力下,温度为25℃(77°F),最大相对湿度为85 %。
B、位置
测试和调整是在设备正常工作时放置工作间进行测试。
3.所需设备
- 机载电子设备试验控制器 1台;
- 机载电子设备试验继电器矩阵交换箱 1台;
- 安装有固定“拉杆式位移和拉、压力传感器”的测试串联舵机试验台 1个;
- 28V DC,5A电源 1台;
- 具有45V DC测试电压的兆欧表 1个;
- 数字万用表 1个;
4、绝缘测试:
在45V DC条件下,所有常用销脚的绝缘电阻必须优于20兆欧。
注意:
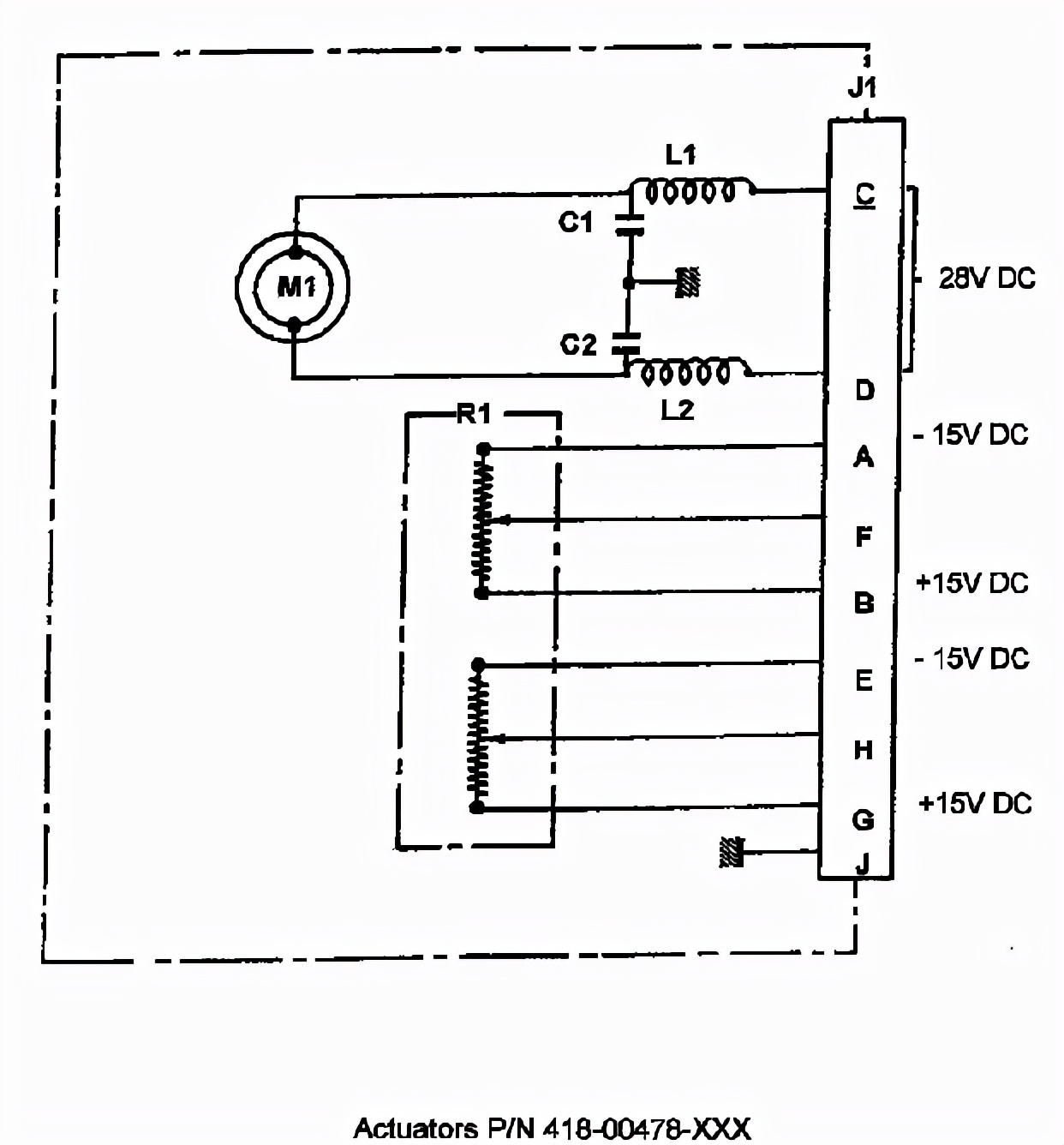
- 对于执行器P/N 418-00478-XXX,P/N 418-00514-XXX和418-00515-XXX,不测试引脚J。
- 对于执行器,P/N 418-00494-XXX不测试引脚E。
- 销J和E连接到执行器外壳(框架接地)。
5、测试检查前的初始化步骤:
(A)、进入检测程序前首先检查所需要检测的“串联舵机”和“拉杆式位移和拉、压传感器”之间连接的万向连接器是否按照测试设备手册上规定的件号和型号连接,所使用的连接电缆与被测“串联舵机”设备件号是否相符。
检查测试设备和被测设备如下图系统连接各部分连接端口是否接插牢固。

(B)、接通供电电源,进入虚拟化仪表测试程序屏幕:
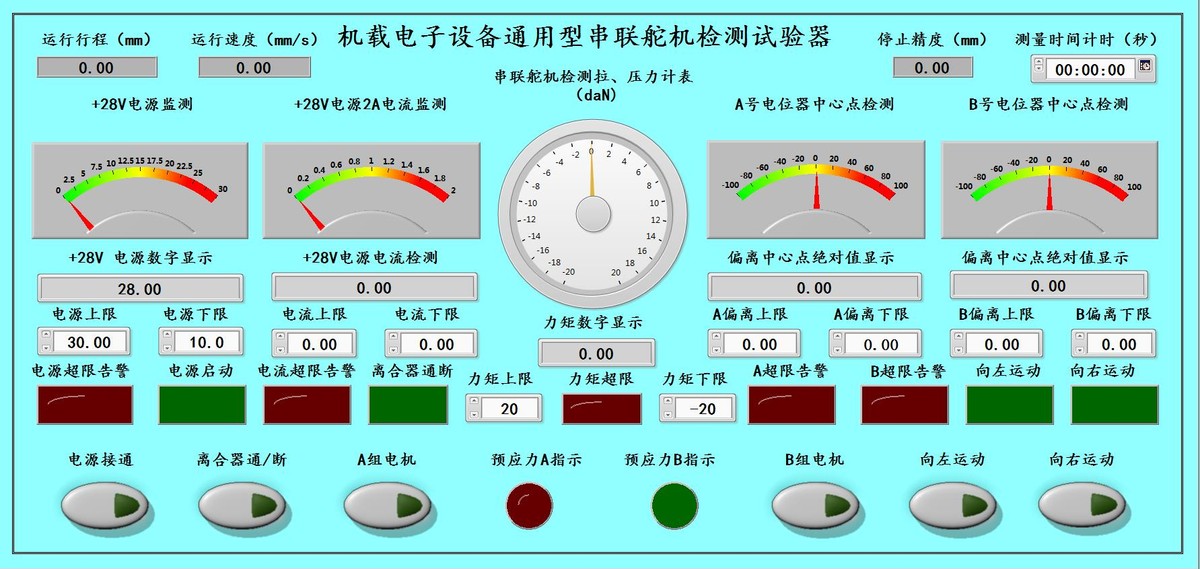
(C)、用鼠标点击“电源上限”显示窗“▲”上下按键或直接输入窗口数据为“30”V,选择显示窗“电源下限”为“10”V,用鼠标点击“电源接通”按钮开关,指示灯上“△”指示灯燃亮,接通测试设备电源,观察“电源启动”指示灯燃亮,指针式电压显示表头和数字式电压显示窗口,均显示28V。
6、电动机速度检查:
注意:对于适用于特定执行器模型的负载和测量值,请参考基于操作的图表。
例如检测串联舵机件号为:418-00478-044的舵机:
外形示意图:

内部电路接线连接图:
测试时选择用鼠标点击按压“A组电机”开关接通“A组电机”测试程序。
6.A、用鼠标点击按压“向右运动”按钮,指示灯上“△”指示灯燃亮。
表示在执行机构轴向外移动的C(+)、D(-)之间施加负载( daN )和27V DC电压,测量强度(I)和速度(mm/s)。
再用鼠标点击按压“向右运动”按钮,指示灯上“▲”指示灯熄灭。

表示断开了执行机构轴向外移动的C(+)、D(-)之间施加负载( daN )和27V DC电压。
用鼠标点击按压“向左运动”按钮,指示灯上“△”指示灯燃亮。

表示在施加相同负载( daN )和D(+)和C(-)之间的27V DC电压下:执行器轴向内移动,测量强度(I)和速度(mm/s)。
再用鼠标点击按压“向左运动”按钮,指示灯上“▲”指示灯熄灭。
表示断开了执行机构施加相同负载( daN )和D(+)和C(-)之间的27V DC电压下。
6.B、例如检测串联舵机件号为:418-00478-044的舵机:
用鼠标点击按压“向右运动”按钮,指示灯上“△”指示灯燃亮。
在C(+)和D(-)之间施加有和27V DC电压:执行器轴向外移动。
观察屏幕显示检测数据,检测结果应为:
测量强度(I)和速度(mm/s)。
测量强度(I):
速度(mm/s):

再用鼠标点击按压“向右运动”按钮,指示灯上“▲”指示灯熄灭。
表示断开了执行机构轴向外移动的C(+)、D(-)之间27V DC电压。
例如检测串联舵机件号为:418-00478-044的舵机:
用鼠标点击按压“向左运动”按钮,指示灯上“△”指示灯燃亮。

表示在施加相同负载( daN )和D(+)和C(-)之间的27V DC电压下:执行器轴向内移动,测量强度(I)和速度(mm/s)恢复原位。
测量强度(I)复位:
速度(mm/s)恢复原位

6.C、例如检测串联舵机件号为:418-00478-044的舵机:
用鼠标点击按压“向左运动”按钮,指示灯上“△”指示灯燃亮。
表示在施加相同负载( daN )和D(+)和C(-)之间的27V DC电压下:执行器轴向内移动,测量强度(I)和速度(mm/s)。
测量强度(I):

速度(mm/s)。
再用鼠标点击按压“向左运动”按钮,指示灯上“▲”指示灯熄灭。
表示断开了执行机构施加相同D(+)和C(-)之间的27V DC电压。:
6.D、恢复原位。
6.E、其他型号的检测:
执行机构PIN 418-00502-XXX、418-1-XXX和418-00562-XXX配备双电机。
重复操作6.A、6.B、6.C、6.D检查第二个电机,
用鼠标点击按压“B组电机”开关,开关指示灯上“△”指示灯燃亮,接通“B组电机”。
6.A、用鼠标点击按压“向右运动”按钮,指示灯上“△”指示灯燃亮。
表示在执行机构轴向外移动的J(+)、K(-)之间施加负载( daN )和27V DC电压,测量强度(I)和速度(mm/s)。
再用鼠标点击按压“向右运动”按钮,指示灯上“▲”指示灯熄灭。

表示断开了执行机构轴向外移动的J(+)、K(-)之间施加负载( daN )和27V DC电压。
用鼠标点击按压“向左运动”按钮,指示灯上“△”指示灯燃亮。

表示在施加相同负载( daN )和K(+)和J(-)之间的27V DC电压下:执行器轴向内移动,测量强度(I)和速度(mm/s)。
再用鼠标点击按压“向左运动”按钮,指示灯上“▲”指示灯熄灭。

表示断开了执行机构施加相同负载( daN )和K(+)和J(-)之间的27V DC电压下。
使用端子J(+)和K(-)调节器轴向外移动,J(-)和K(+)调节器轴向内移动,
注:执行器P/N 418-00562-312和418-00561-612有两个独立的连接器J2和J3,具有相同的引脚分配,电源通过C和D提供给电机。