
以灵活性而闻名的章鱼为软体机器人的研制提供了灵感
地中海泛着粼粼的波光。时值午后,我实验室里的一位研究生第一次将我们的机器人投入水中。
机器人没有令我们失望:我们发出游泳的命令后,它用水充满其可扩张的外罩,然后向外喷水前行;我们命令它缓行时,它用力地依次活动8肢,推动自己沿着底部的泥沙和散落的暗礁行进;我们指示它探索码头下面的狭窄空间时,它轻而易举地将柔软的身躯伸进狭窄的缝隙。
作为意大利比萨圣安娜高等学校仿生机器人研究所的教授,我带领了一个团队研究软体机器人。我选择构建仿生章鱼机器人有两个原因。首先,章鱼机器人非常适合展示随需弯曲和挤压能力的优势。此外,这也是一个非常好的工程挑战:一个章鱼机器人有8个摇摆肢,它们必须协同面对水中各种复杂的力,这一点很难设计和控制。
 长久以来,机器人主要用于工厂,其刚性肢体适合执行手头的重复性任务并满足所需的精确度。然而,机器人专家现在想将他们的创造物用于传统机器人难以处理的、更难预测的环境。
长久以来,机器人主要用于工厂,其刚性肢体适合执行手头的重复性任务并满足所需的精确度。然而,机器人专家现在想将他们的创造物用于传统机器人难以处理的、更难预测的环境。
比如一些研究人员希望制造出可以应对海底或火星表面等非常规环境的柔性机器人,还有一些研究人员正集中精力研究不会伤害他人的软体机器人。例如可以作为手术工具进入人体的微型软体机器人。
为实现这些目标,机器人研究人员不断研究各种动物。这就是为什么我协助启动了章鱼集成项目。欧洲和以色列几所大学的实验室自2009年开始就该项目展开合作,共同研制能够模仿这一迷人动物的机器人。
章鱼没有内外部骨骼,8肢可以随意弯曲、伸长、缩短和用力。它可以灵活地卷曲肢体勾住目标进行任意动作,并且依靠这种灵巧性得以在野外生存。
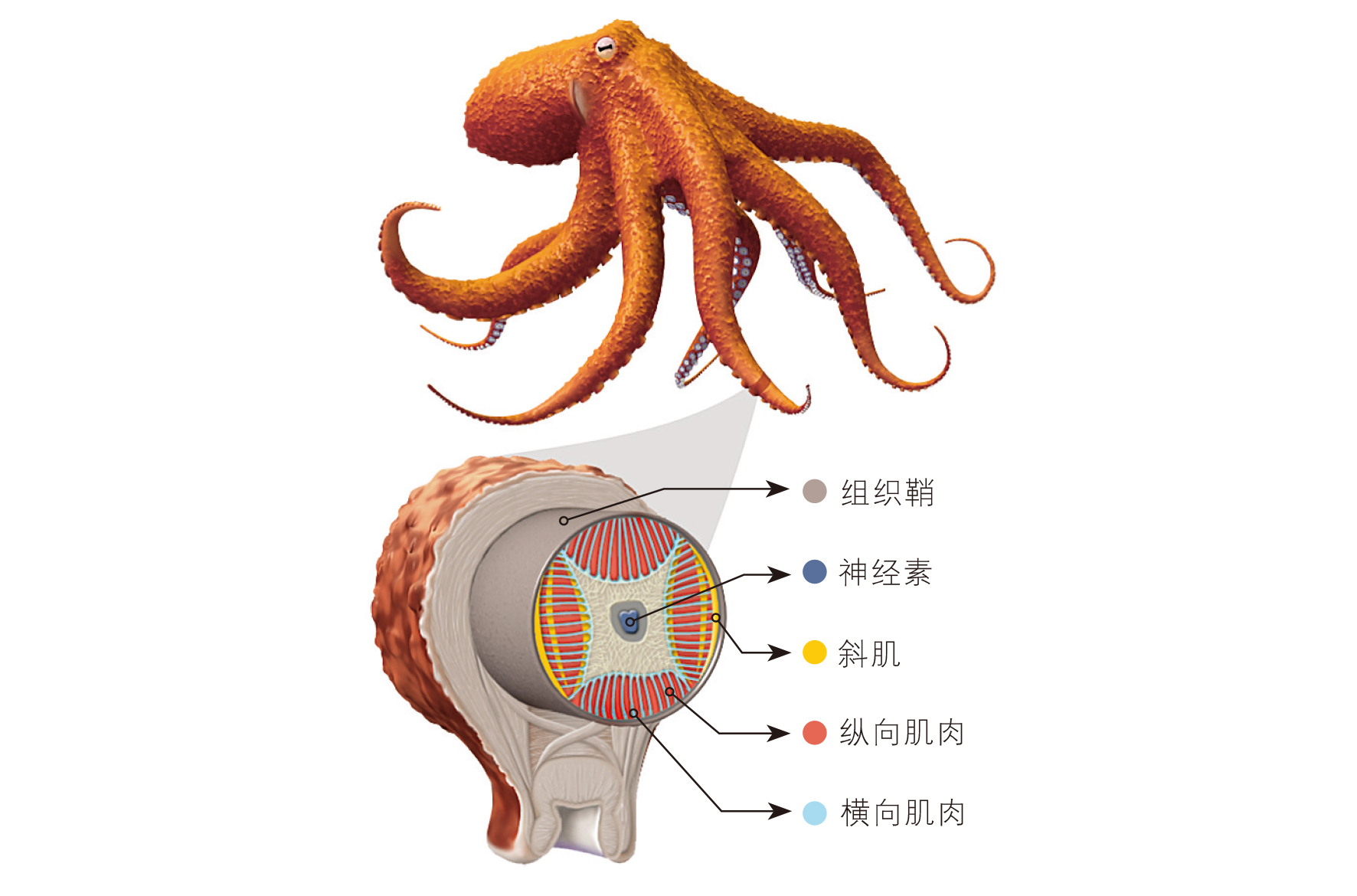
章鱼肢体动作由交错分布的肌肉来实现。纵向肌肉收缩,章鱼肢体变短、变粗;横向肌肉收缩,肢体变长、变细。
我们首先研究了章鱼肢体的肌肉性静水骨骼结构,这种结构能在保持肢体总体积不变的同时,使个别肌肉收缩并改变形状。为了将生物学现象转化为工程学研究,我们与海洋生物学家合作测量了章鱼肢体,并制作出能够为我们的设计提供信息的计算机模型。然后我们开始实验如何制作出可以模仿章鱼肌肉的软执行器。
一种方法是使用电活性聚合物(EAP)这种材料来制造人造肌肉。两个电极像三明治那样将软材料层夹在中间;施加电压时,EAP充当电容器,电极向中间靠拢,挤压它们之间的软材料。利用这种现象,研究人员已经制造出可以堆叠并产生明显力量的收缩单元。另一个可能方法是使用流体执行器建造机械肢体,将液体或气体注入软体腔以改变更大结构的形状。如果软体腔设计和排列合理,那么机器人肢体就可以按要求弯曲并最终完成更复杂的动作。还有一个有趣的方法是用颗粒物(例如沙子,甚至是咖啡粉)取代流体作为软体腔的填充物。有了这种“塞入”(jamming)技术,软体机器人在常态下将保持柔软,而内部真空时则会形成坚硬的形状。按照设定的顺序使各部分内部真空,研究人员可以让软体机器人以特定的方式变硬并移动。
我的团队最感兴趣的方法是使用形状记忆合金(SMA)这种材料来制作人工肌肉。加热时,SMA变形到预定形状并“记住”。我们将SMA线做成弹簧状,通电使其加热,弹簧就会模仿肌肉进行收缩。我们针对章鱼集成项目构造了一个原型肢体,用SMA弹簧作为章鱼肢体内的纵向和横向肌肉。通过给不同组的弹簧通电,原型肢体可以在多个不同点弯曲、缩短和伸长,甚至可以抓取东西。我们的工作主要是展示软体机器人的潜力,在章鱼机器人实际走出实验室之前还有很多工作要做。举例而言,肢体带有传感器的机器人可以反馈其位置和触碰物,这将有助于我们制定更好的控制策略。
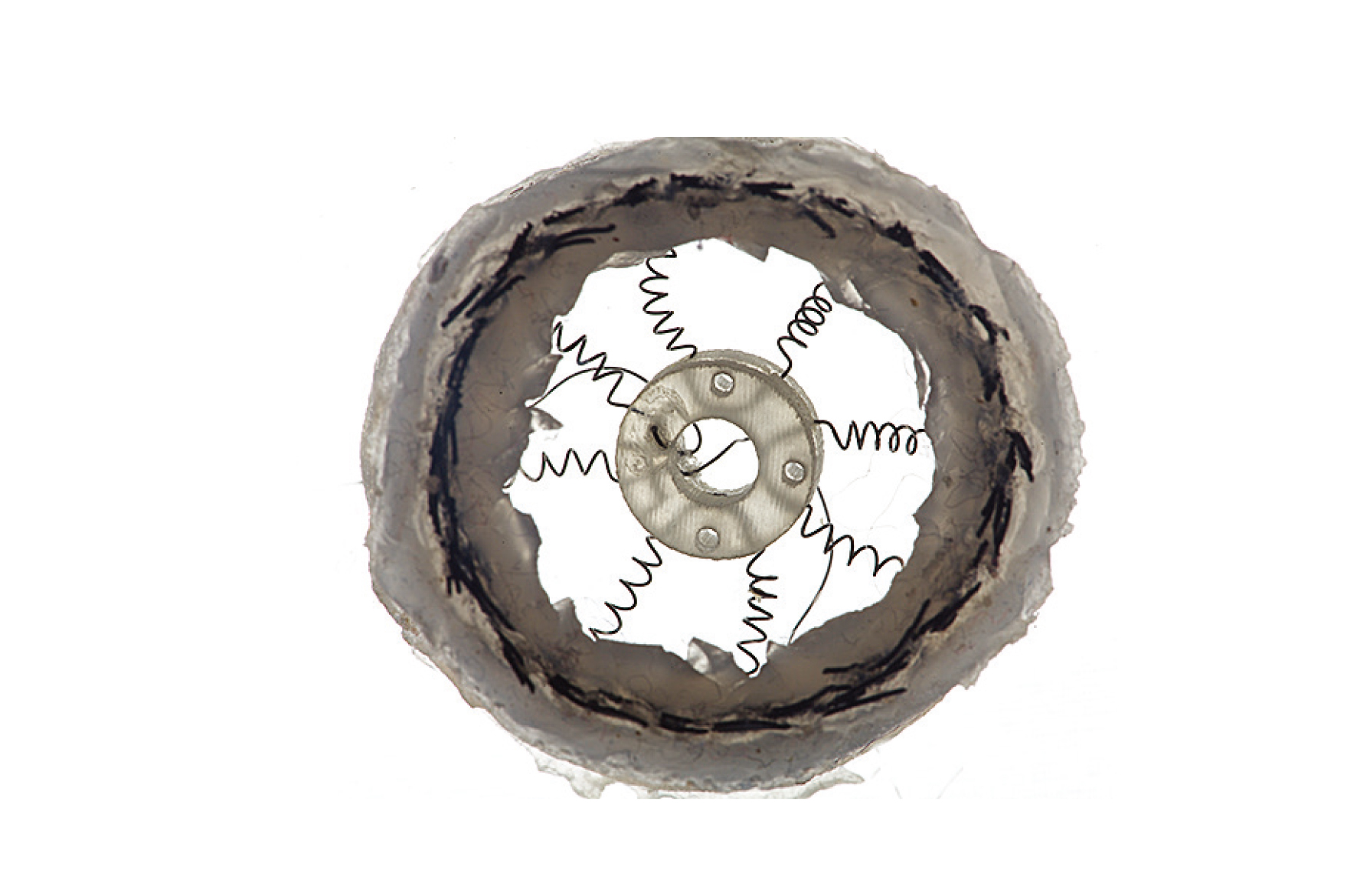
机器人专家用通电后可收缩的弹簧来模拟章鱼的肌肉
机器人专家除了对章鱼的肢体和肌肉感兴趣 ,还看重章鱼的特殊智力水平。章鱼的大脑和周围神经系统发育有限,却可以控制8个独立的肢体进行大范围的活动。因此,章鱼集成项目的下一个挑战就是研究章鱼的控制机制,寻找可以管理柔性机器人复杂运动的方法。生物学家指出,章鱼的大脑并不会针对扭曲的8肢的每一个小动作发出自上而下的命令。大脑只负责启动动作,而较低的运动中心控制更精细的神经肌肉活动。
更有趣的发现是:章鱼的肢体不需要全面的方向认知来进行所需的运动。经过数百万年的进化,它们的身体能够以自主并有效的特定方式对环境做出响应。这个概念通常被机器人专家称为形态计算,而人工智能研究人员则称之为具身智能。这个原理意味着,我们设计的机器人可以凭借身体的物理特性自动进行所需的运动。有了这个策略,极其简单的命令就能够使机器人高效地执行复杂的任务。
我的团队第一次着手制作可以沿着海底爬行的机器人章鱼时,就时刻铭记这个原则。我们研究了真实章鱼的运动策略,并确定了它的爬行分为4步骤。为了模拟这种运动形式,我们的章鱼机器人似乎需要进行大量的计算,以控制其8肢,使每肢都可以在任意点弯曲。
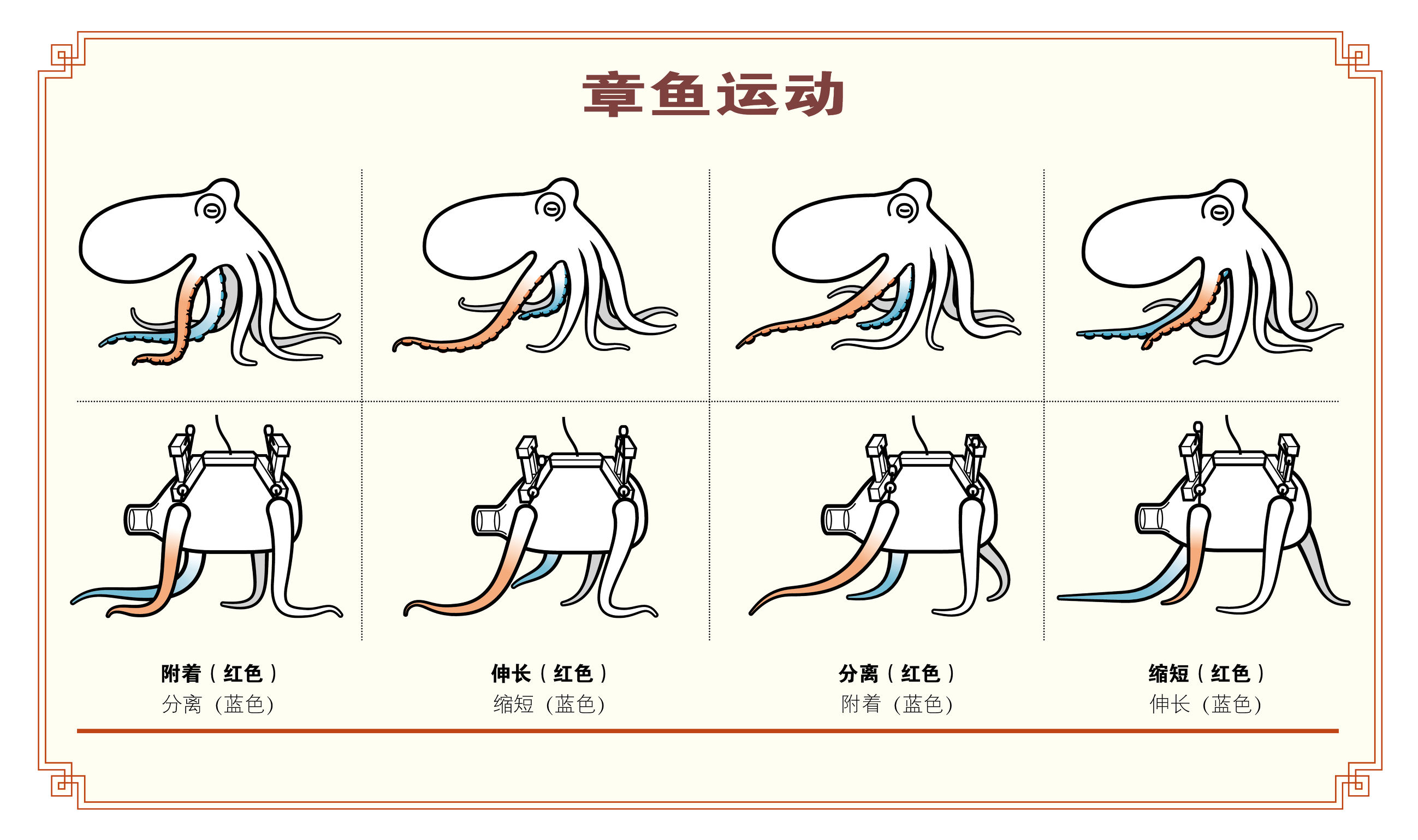
章鱼运动四大步骤:通过研究真实章鱼的4步爬行技巧,机器人专家可以将这些过程复制到章鱼机器人上,使其沿着海底爬行。首先,章鱼的一肢附着在结实的海底地表上;然后伸长该肢体以将其身体向前推;随后该肢脱离地表;最后,该肢体缩短,贴近身体。
我们决定遵循进化的原则,尝试制作不需要复杂控制输入的机械肢体。我们制定了数学模型以全面测试机械肢体的各种设计,包括所用材料的密度、硬度、形状以及人工肌肉的内部布局等。我们在模型中增加了流体动力学要素。我们还考虑了机器人爬行表面的纹理和结构等等。要为模型中所有这些参数找到最佳组合,我们使用一种进化算法在较大范围内寻找可能解。通过这种方式,我们确定了可以产生恰当推进力量并执行所需爬行动作的组合模式。
事实证明,控制章鱼机器人并不难,可以模仿我们在章鱼身上所观察到的爬行4步骤。我们旨在通过这个原型展示控制机制,而不是材料,为此我们替换了SMA,使用电缆作为人工肌肉。每个硅橡胶肢体都包含一条可以延长或缩短机械肢体的钢缆,以及一根用于弯曲机械肢体以实现附着和分离步骤的碳纤维电缆(同时也能使机器人抓住物体)。每个机械肢体中有一个简单的伺服电机提供电力。
我们在设计时进行了大量复杂计算。但当机器人行动时,我们可以自豪地说,它非常“傻”:它只有一个简单的“大脑”,或者说微控制器,通过正确的顺序启动机械肢体,使章鱼机器人凭借其自身的机械性能爬行。我们的章鱼机器人展现了形态计算的有效性。
我在仿生机器人研究所的团队于2012年又启动了一个名为PoseiDrone的相关项目。我们的目标是制造出一个软体水下机器人,它不仅可以爬行和抓住物体,而且可以游泳。
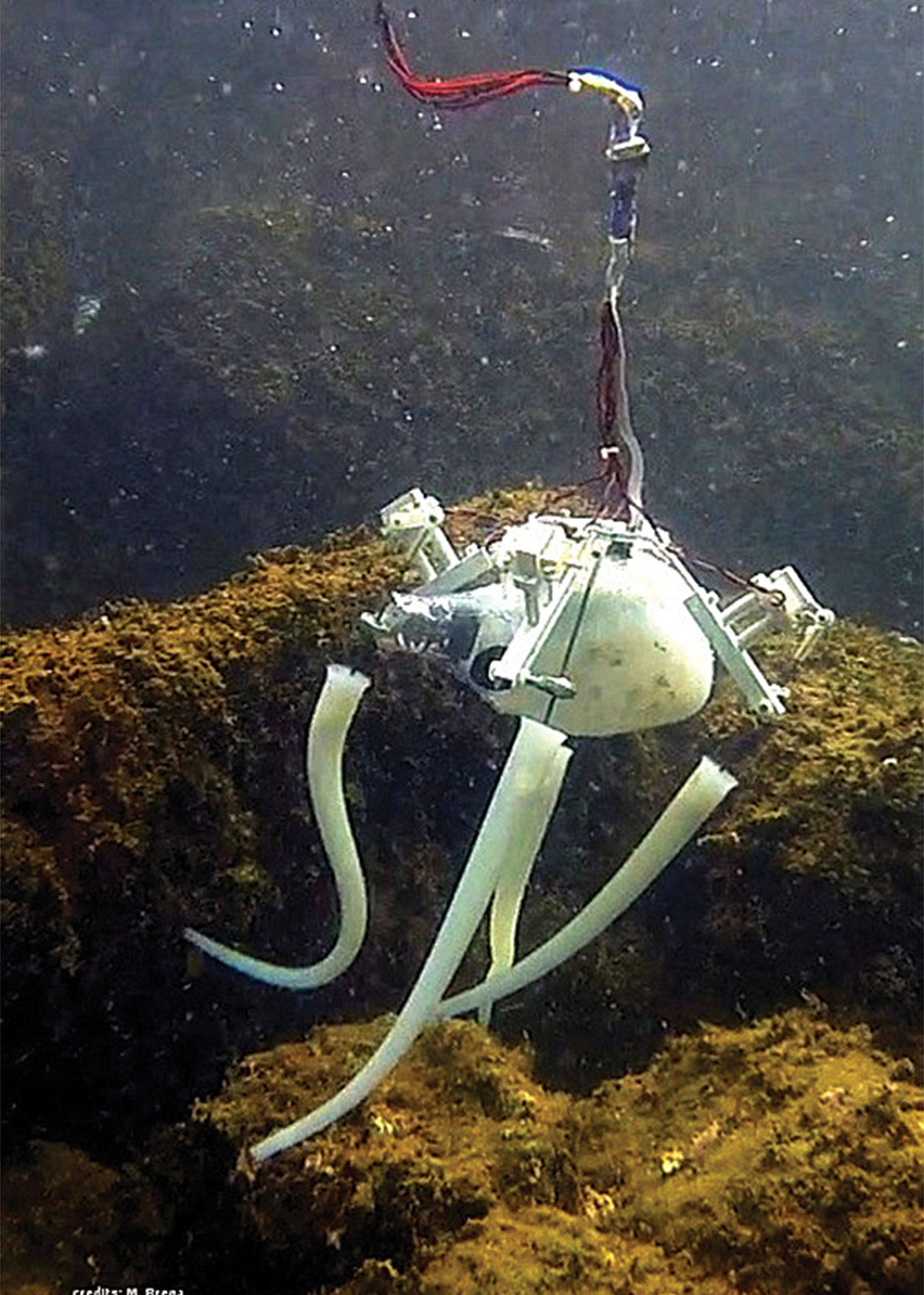
游泳:机器人模仿章鱼的喷射推进方法,在地中海里移动。
为了赋予机器人游泳的本领,我们再次使用了形态计算。设计的关键是章鱼机器人的外罩。这一部分可在充满水时膨胀,然后收缩,喷射水并产生推进力。我们又一次使用计算机模型确定硅树脂罩的尺寸、形状和材料性质,尤其是结构在喷射水时变形的方式。我们的算法产生了最佳组合,只需要一个小电机和几条简单的线缆就可以使章鱼机器人实现水中的喷射推进。
这个软体水下机器人的原型就是本文开篇我们投进地中海的机器人。我们很高兴地目睹机器人在不可预测的表面、波浪和电流间从容应对。实验结束时,我们为这个原型找到了一个合适的休憩地。PoseiDrone机器人将很快驻留在意大利里窝那水族馆的一个水箱中,旁边是一只真正的章鱼。
作者:Cecilia Laschi