
(图片来源于:瑞士联邦理工学院 )
引言
IntelligentThings之前介绍过很多各具特色的无人机,例如
CRACUNS无人机,
Hover Camera:微型可折叠无人机
,
潜鸟无人机可以飞行,漂浮甚至潜入水中,等等。
但是,这些无人机都有一个共同特点,是多轴飞行器,具有多个螺旋桨。
有没有一种无人机,只要一个螺旋桨,而不需要襟翼,铰链,副翼,等其他飞行部件呢?瑞士联邦理工学院动态系统与控制研究所的研究人员,就开发了这样一种单螺旋飞行器,它具有最简单的机械结构,没有其他的制动器。
控制飞行器飞行所需要最少的运动部件是多少?
所以,一般的飞行器具有多个运动部件,例如传统的多轴飞行器,具有四个运动部件(四个固定的螺旋桨)。一架直升机的主旋翼,具有复杂的滑盘机制,所以需要多个运动部件的配合,而一个固定翼飞机需要副翼,方向舵,升降舵和主制动器。翼果类型的飞行器像枫树种子一样,飞行时候会旋转,这种飞行器在飞行时候需要两个制动器来控制位置。一些玩具也只有一个运动部件,但是不能在水平方向被控制。

(图片来源于:瑞士联邦理工学院 )
单螺旋机的控制原理
研究人员的目标是研究只有一个运动部件的飞行器。理论基础是之前对于四轴飞行器的研究,这种四轴飞行器在缺少一个,两个,或者三个螺旋桨的情况下,仍然还可以很好的飞行。为了这么做,研究人员定义了一个“盘旋”模式:只要它靠近空间中同样的位置点,飞行器可以以恒定的角速度旋转。当然,在这种模式下,飞行器仍然要可以受控,从而追踪轨迹和拒绝干扰。
理论分析
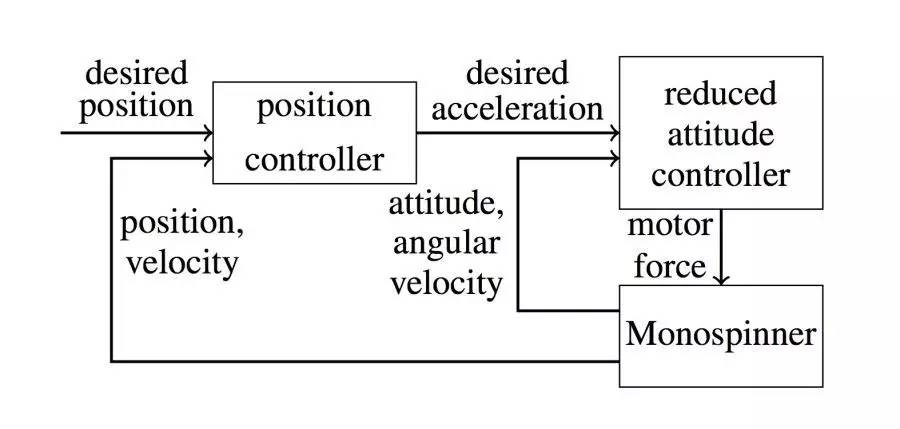
这对于单螺旋机来讲,是一个难点。因为它只有一个输入(推力),来控制它的状态,而传统的飞行器具有四个输入。我们设计了一个级联控制器,较快地内循环控制推力方向,同时较慢的外循环控制加速度和位置。简单地说,单个控制输入(推力大小)可以被分解为两个部分,平均推力的部分(由外部循环计算),来决定单螺旋机的加速度,以及推力的误差(由内部循环计算)来进行方位控制。
(图片来源于:瑞士联邦理工学院 )
级联控制结构: 外部的位置控制定义了期望的加速度和内部的姿势控制定义了飞行器的姿势。
实际制造
经过理论分析后,研究人员开始建造飞行器。然而,现实世界中有很多不确定因素:举例说,就是没有一个很好的复杂旋转物体的空气动力模型 。更进一步的说,还有例如质量分布和飞行器重心的位置。研究人员设置了一个飞行器,虽然可以飞行,但是并不能精确地知道参数。他们使用蒙特卡罗模拟,评估了各种设计。他们对各种扰动,例如上述各种不确定性,进行了采样,模拟测试控制器的工作状况。然后,他们一直做,直到发现一种在大多数情况下都可以正常工作的配置。下图所示的Y形状的飞行器。
(图片来源于:瑞士联邦理工学院 )
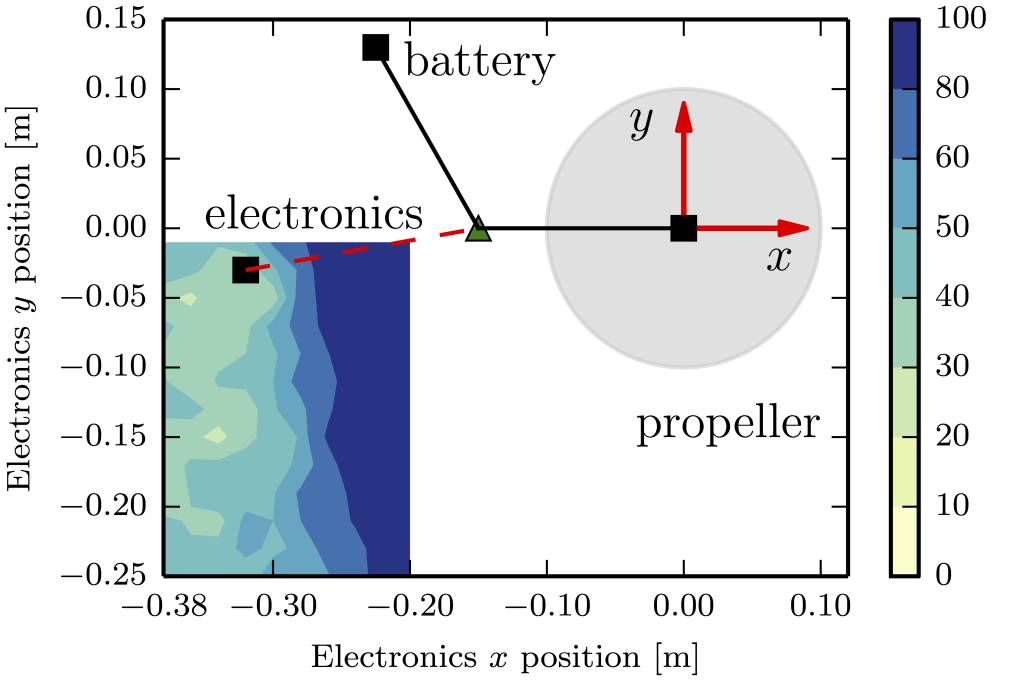
蒙特卡罗模拟的结果,展示了如何放置飞行器的电子部件(颜色范围表明事故的可能性),飞行器最可能被控制。基于目前的飞行器的近似大小和形状。飞行器,具有三个主要部件:电池,电子器件,马达/螺旋桨。固定螺旋桨和电池,作为一个等边三角形的两个顶点。而蒙特卡罗分析决定电子器件的位置,可能位于三角形另外一个顶点附近。而最终,电子器件的位置,被选择为折衷在(蒙特卡罗模拟)和其他的考虑(例如机械结构区域)之间。这个位置以一个红色的虚线标记。
更多精彩内容,请关注微信公众号:
IntelligentThings
如果大家有什么关于创新技术或者产品问题想了解,请写评论告诉IntelligentThings,或者联系微信:JohnZh1984。我会定期参看大家的问题,并选择一些来回答。